资源传感器
资源传感器

参考指南 \ 组件与对象 \ 资源 

传感器
传感器信号端口
资源传感器对象命令
更多资源参考信息

传感器
传感器是组件,通常是电子组件,可以检测或测量过程变量。传感器的输出是一个信号。 该软件支持以下类型的传感器。

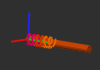
接近传感器 接近传感器可以在不与物体接触的情况下检测物体的存在。 在3D视图中,接近传感器由下图所示的对象形象地表示。

传感器对象的圆柱显示传感器检测区域或碰撞区域的实际尺寸。 接近传感器具有以下属性:
属性 描述 备注 
名称 接近传感器的名称。 允许为空名。 端口类型 传感器的端口类型,即检测时的开关行为。传感器支持两种类型: 
常开 NO
常闭 NC 切换直径 传感器检测区域的直径。 切换距离 传感器检测区域的高度。

X, Y, Z 传感器的X, Y和Z坐标。 坐标设置为组件的全局坐标系统。 滚动(X), 俯仰(Y), 偏航(Z) 传感器的滚动、俯仰和偏航方向。 方向角设置为组件的全局坐标系统。

定义传感器可以检测的组件类别。通过相应的类别图标进行选择。 重置命令将定义切换回基本设置。 类别工件。
类别资源。
选择类别图标将设置类别的所有组件。 类别人类。

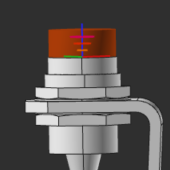
光栅传感器 光栅传感器可以在不与物体接触的情况下检测物体的存在。 在3D视图中,光栅传感器由下图所示的对象形象地表示。
传感器对象的圆柱显示传感器检测区域或碰撞区域的实际尺寸。光栅传感器具有以下属性:
属性 描述 备注
名称 光栅传感器的名称。 允许为空名。 端口类型 传感器的端口类型,即检测时的开关行为。传感器支持两种类型:
常开 NO
常闭 NC 切换直径 传感器检测区域的直径。 切换距离 传感器检测区域的高度。
X, Y, Z 传感器的X, Y和Z坐标。 坐标设置为组件的全局坐标系统。 滚动(X), 俯仰(Y), 偏航(Z) 传感器的滚动、俯仰和偏航方向。 方向角设置为组件的全局坐标系统。
定义传感器可以检测的组件类别。通过相应的类别图标进行选择。 重置命令将定义切换回基本设置。 类别工件。
类别资源。
选择类别图标将设置类别的所有组件。 类别人类。
传感器信号端口
传感器的端口类型定义了传感器在检测时的行为。 在模拟期间,传感器的状态开关通过传感器对象颜色的变化来可视化。
资源传感器对象命令


更多资源参考信息
