使用自动生成路径链接功能¶
自动链路路径生成¶

自动链接路径生成是一种功能,其主要目标是创建两个操作之间的运动路径,该运动路径在制造设备(工具,机器人等)与工件或其他设备之间没有任何碰撞。进一步的目标,例如最小周期时间,可能作为次要需求包含在功能中。
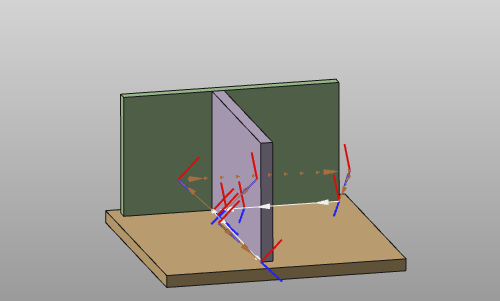 之前
之前
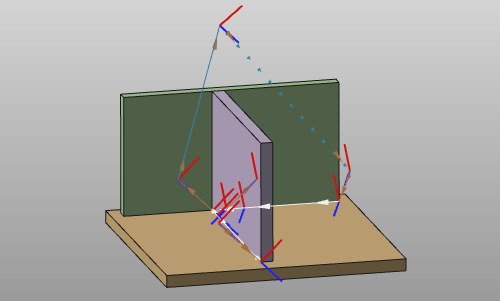 之后
之后
方法¶
与操作之间的直接连接相比,该函数将生成更复杂的路径。
该函数适用于现有的工具路径结构,其中:
 如果需要,自动创建操作之间的链接路径。
在操作链接路径本身内创建额外的位置。
如果需要,自动创建操作之间的链接路径。
在操作链接路径本身内创建额外的位置。
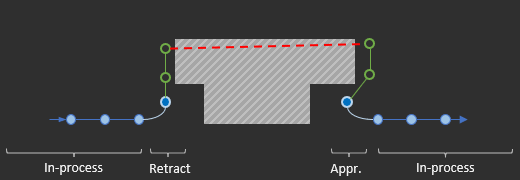
具有以下限制或边界条件:
第一次操作的缩回位置和第二次操作的进近位置需要无碰撞,因为生成器不能修改这些位置。
下面的图片显示了将生成的解决方案的示意图。
 之前
之前
 之后
之后
条件¶
技术系统配置¶
每种技术都有不同的边界条件和要求。不同的机器人或机器类型,它们的配置和转弯值(如果适用)以及首选运动(PTP, lin,…)对于计算正确和预期的链接路径非常重要。考虑到这一点,将不会有一般的解决方案,基于工件的几何形状。对于每种工艺和制造设置情况,系统都计算出自己的特定解决方案。
对链接操作的依赖¶
通过链接路径连接的操作本身可以通过各种可用的编程功能进行修改或优化。这意味着自动链接路径生成可能不会在连接时更改这些操作。这意味着:
保留源操作的最后一个工艺点和目标操作的第一个工艺点的位置坐标、机器人配置和转动值。
因此,可能有必要更改配置并在链接路径本身上打开值(取决于运动类型功能)。
当目标点的运动类型与使用的链接策略不匹配时,目标点的运动类型将被改变。目前只有PTP运动用于链接。
外部轴¶
外轴的值将包含在链路路径的计算中。源操作的最后一个过程点和目标操作的第一个过程点的轴值将被保持。即使这些是模态的并且没有显式指定,应用在那里的值也会被保留。
刀具轨迹评估成本¶
链接路径的自动生成可以在连接操作之间创建比以前更复杂的运动路径,以实现无碰撞运行的主要目标。更复杂的运动不可避免地导致更高的刀具路径评估成本,这可能再次导致程序的不正确验证。虽然对刀具路径进行了碰撞、可达性、奇异性和轴极限接近等标准的评估,但为了避免增加成本的指示,将连杆路径排除在成本确定之外。
操作链接¶
用于控制链路路径计算的属性。

| 属性 | 描述 | 备注 |
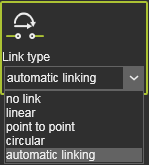
| 链接类型 | 链接路径的类型。 | 要启用自动生成,必须将类型设置为自动链接。 |
| 碰撞宽容 | 在生成链路路径时定义安全距离。 | |
| 解锁外轴 | 使用整个外部轴值范围生成链接路径。 | 关闭: 外轴值只能在链接路径的起点和终点给定的间隔内改变。 开启: 外部轴值要在每个轴的全范围内考虑(即解锁)。 |
| 最大迭代 | 定义寻径算法将运行的最大迭代次数。 |
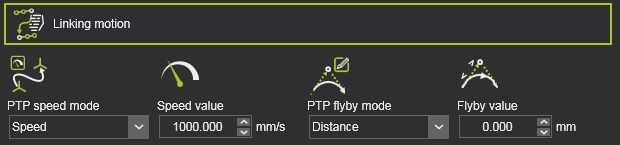
链接运动¶
可以在此容器中找到用于控制沿链接路径移动的属性。
| 属性 | 描述 | 备注 |
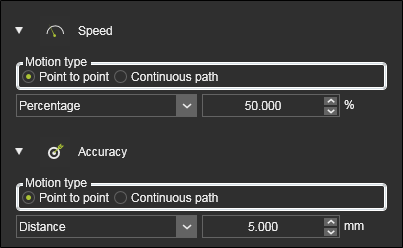
| PTP速度模式 | PTP运动速度。 |
继承: 不需要额外的运动事件。运动从全局PTP运动设置中继承其定义和值。 速度: 运动被定义为绝对速度值。 比例: 运动被定义为资源的最大TCP速度值的百分比。 |
| 速度值 | 运动的速度值。 | |
| PTP飞掠模式 | 飞掠运动,即沿连杆路径位置移动的精度。 |
继承: 不需要额外的精度事件。飞越精度从全局设置中继承其定义和值。 关闭: 创建事件时不按路径位置飞掠。 开启: 事件被创建为按路径位置飞掠。不能设置任何值。 |
| 飞越价值 | 飞越精度的值。 |
事件将在链接路径的第一个位置定义,但前提是在这里设置了属性。否则,该动作将继承现有(全局)定义的值。

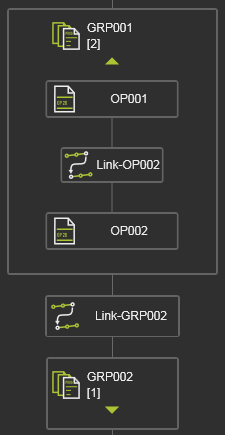
运行自动生成链接路径¶
链接路径可以在程序层、操作组层和操作层定义。它在流程图中是一个单独的实体。
在能够运行自动路径生成之前,需要相应地设置链接运动类型属性。这可以在编程默认值中完成,在编程操作之前,或者之后在活动程序指示板中完成
然后,在所需的程序、操作组或操作级别上,可以调用饼菜单来执行自动路径生成。


 部分模拟
部分模拟
 将操作链接重置为无状态
将操作链接重置为无状态
自动链路路径生成
计算新的操作链接路径,结果立即显示在3D视图和刀具监视器仪表板中。

 对操作链接的属性所做的任何更改都需要重新计算。这不是自动完成的,因此需要通过重新启动命令来触发。
对操作链接的属性所做的任何更改都需要重新计算。这不是自动完成的,因此需要通过重新启动命令来触发。
潜在的问题、建议和考虑¶
生成的链接路径可以很容易地通过在路径上开始部分模拟来验证。建议总是模拟链接路径,以确保它是无冲突的。
链接路径元素可以手工修改。
当链接路径不可见时,请验证其工具路径显示筛选器是否已打开。

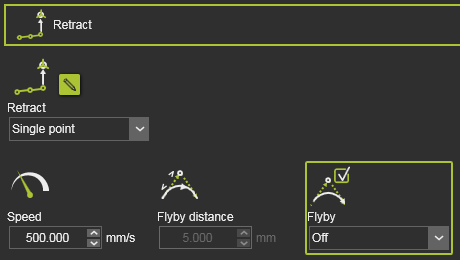
虽然生成的目标是建立一个无碰撞的路径,但仿真仍然显示了一些剩余的碰撞。这可能是由链接起始操作的回滚处的飞越属性造成的。操作链接路径的生成不考虑这种可能的飞越。
这里的解决方案是在收缩运动时禁用这种飞越。
当仍然运行过于靠近工件或设备时,增加碰撞安全距离并重新运行命令。
 仍然存在一些操作链接路径无法生成无碰撞运动的情况:
仍然存在一些操作链接路径无法生成无碰撞运动的情况:
第一次操作的收放位置和第二次操作的进近位置可能会发生冲突,但不能被发生器修改。
给定的边界条件(碰撞安全距离,迭代次数,…)不能返回正确的结果。
由于工件和/或项目设备的(复杂)几何形状,不存在或无法计算无碰撞路径。
当计算运行时间很长时,请验证是否正确定义了冲突组和检查。例如,在刀具和安装刀具的机器人轴之间进行检查没有任何意义,并且会导致计算时间的损失。
由于并非所有机器或机器人的运动学都支持,因此该命令可能不是在所有情况下都可执行。
当无法使用该命令时,请检查产品配置是否正确,产品许可证是否已激活。