建造机器人轨道¶
目的¶
使用创建资源工作台轻松构建机器人轨道。¶
机器人轨道的几何形状将从外部文件导入,以构建轨道资源。为了能够在工作单元中使用导轨,它将使用适当的信息完成。
在本节,您主要能学习如何建造轨道资源并且使其移动,从而更好的在之后建立变位的资源。
步骤¶
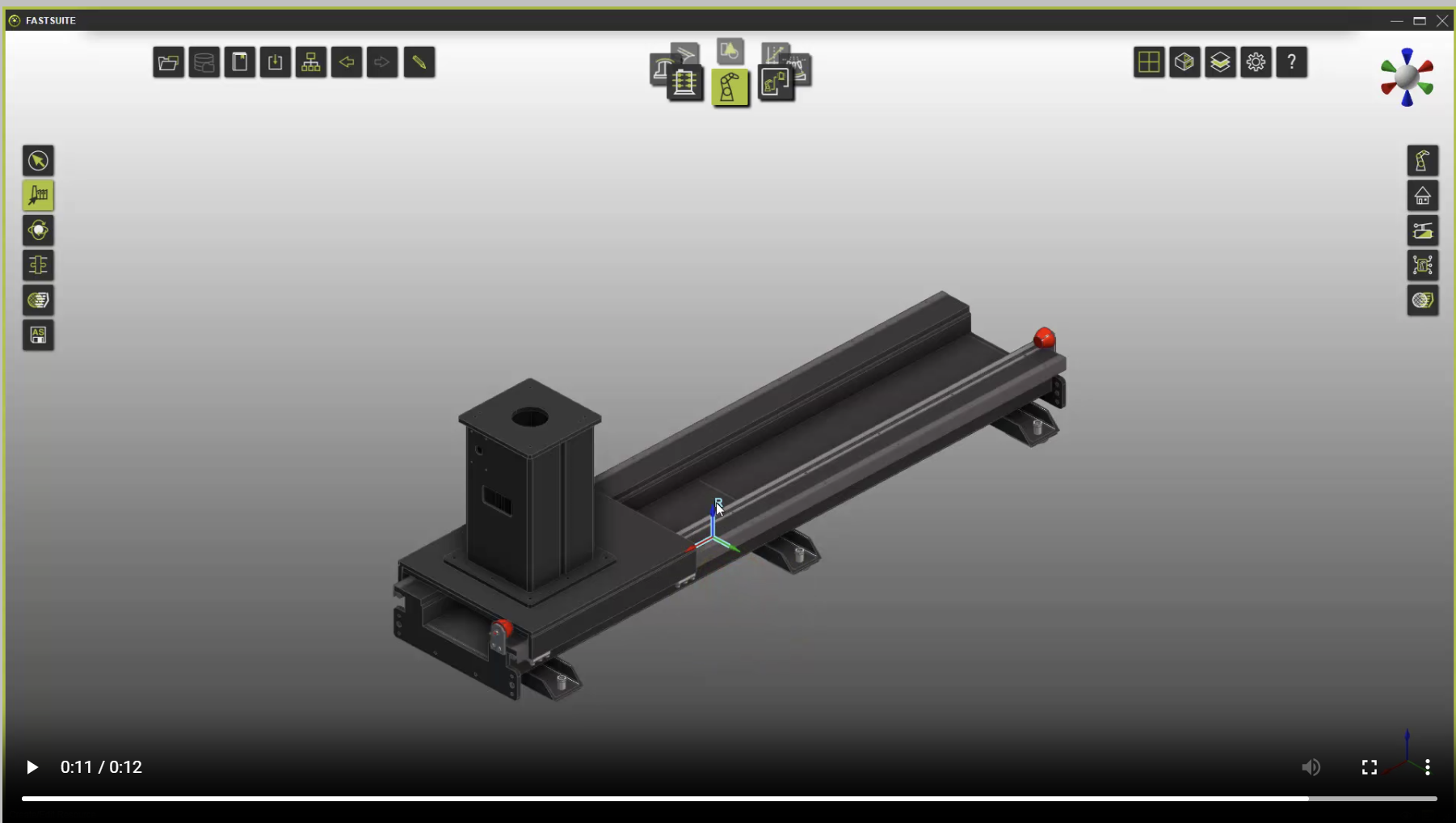
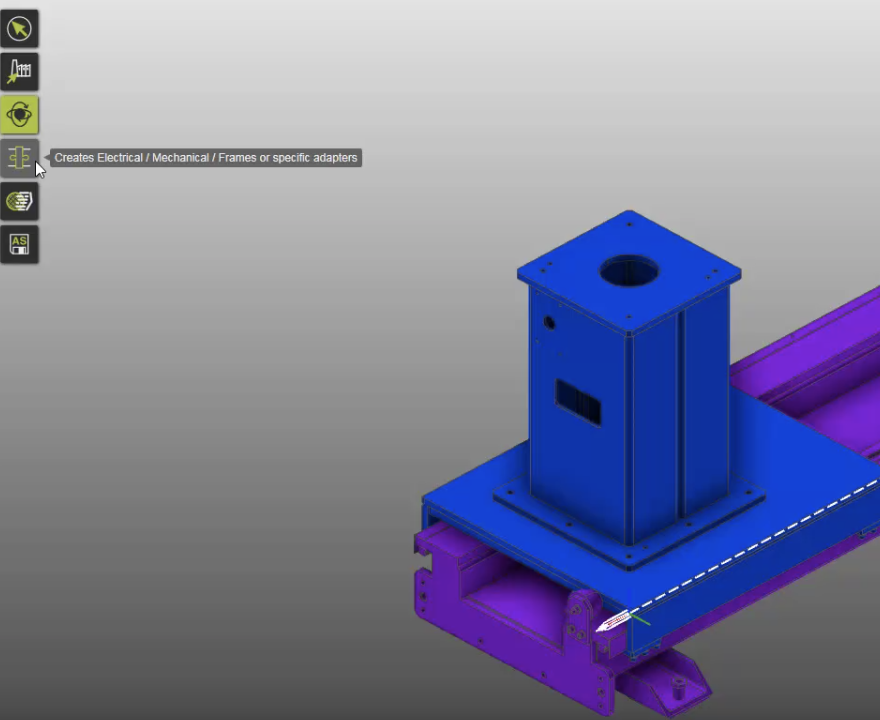
 1.1 切换到资源创建工作台
1.1 切换到资源创建工作台2.定义轨道资源¶
 2.1 将文件几何体导入轨道中¶
2.1 将文件几何体导入轨道中¶
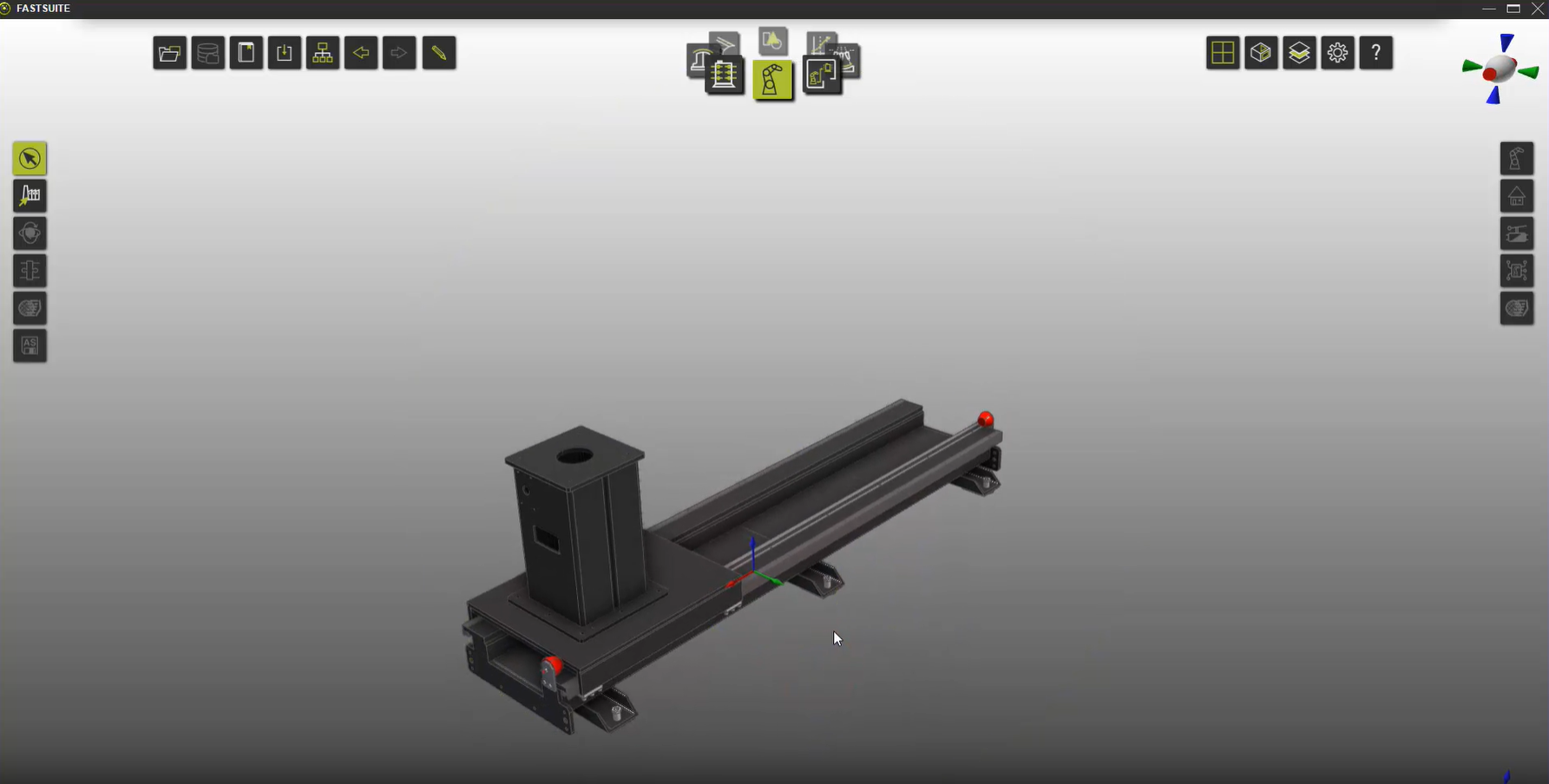
 2.2 为导入的轨道创建一个轨道类型的资源¶
2.2 为导入的轨道创建一个轨道类型的资源¶
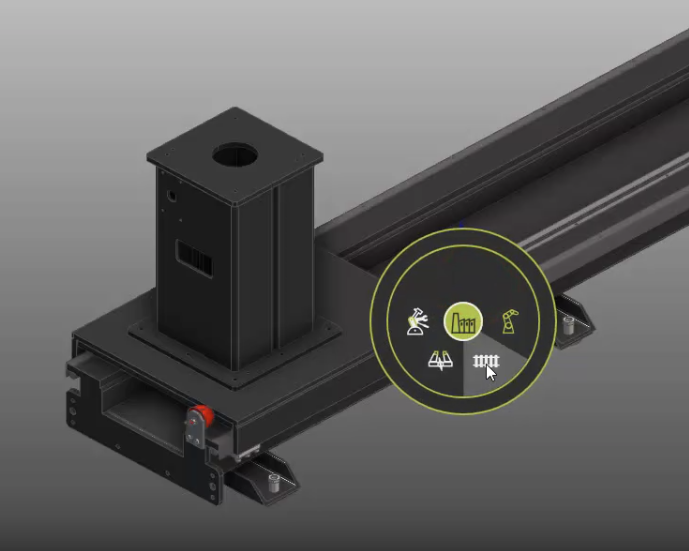
打开操作饼图
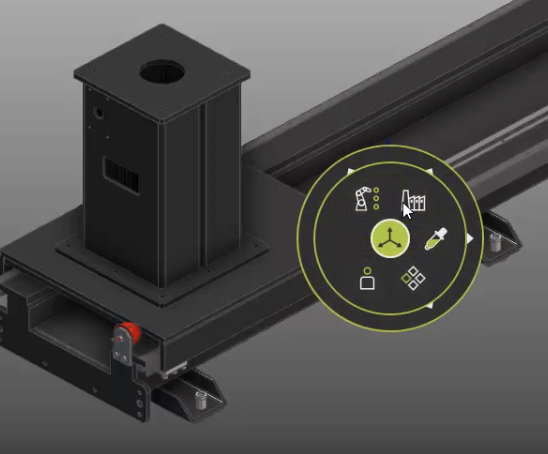 选择轨道资源
选择轨道资源
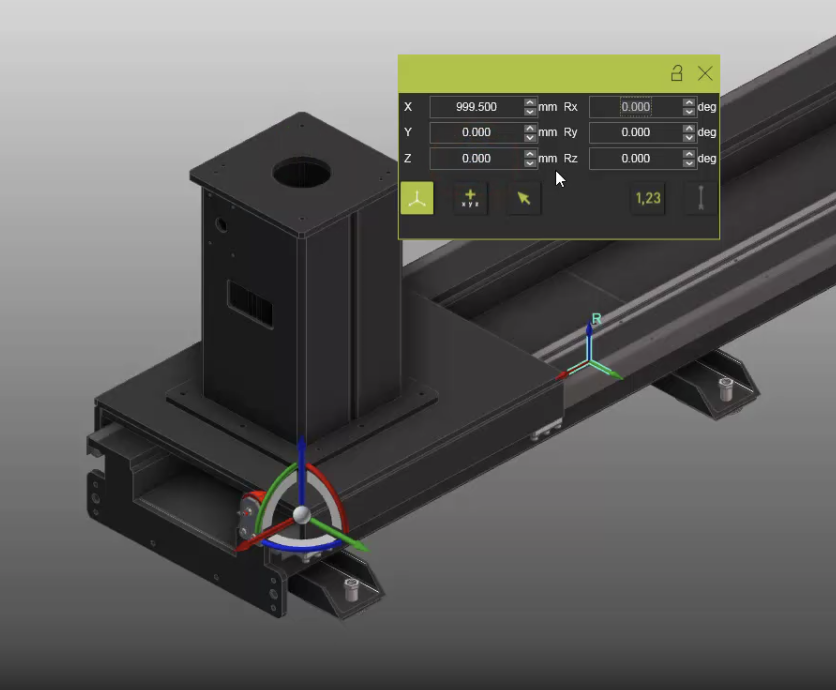
 移动操作球到基座标并生成对应坐标系
移动操作球到基座标并生成对应坐标系
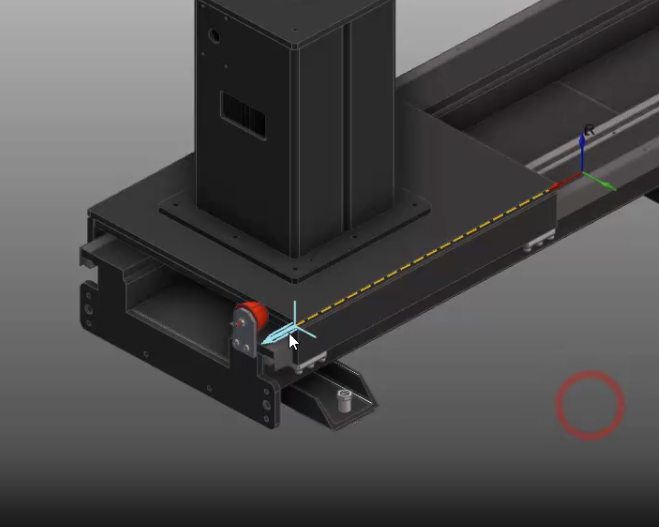
2.3 创建轨道的运动学。轨道将有一个(同步)直线运动。¶
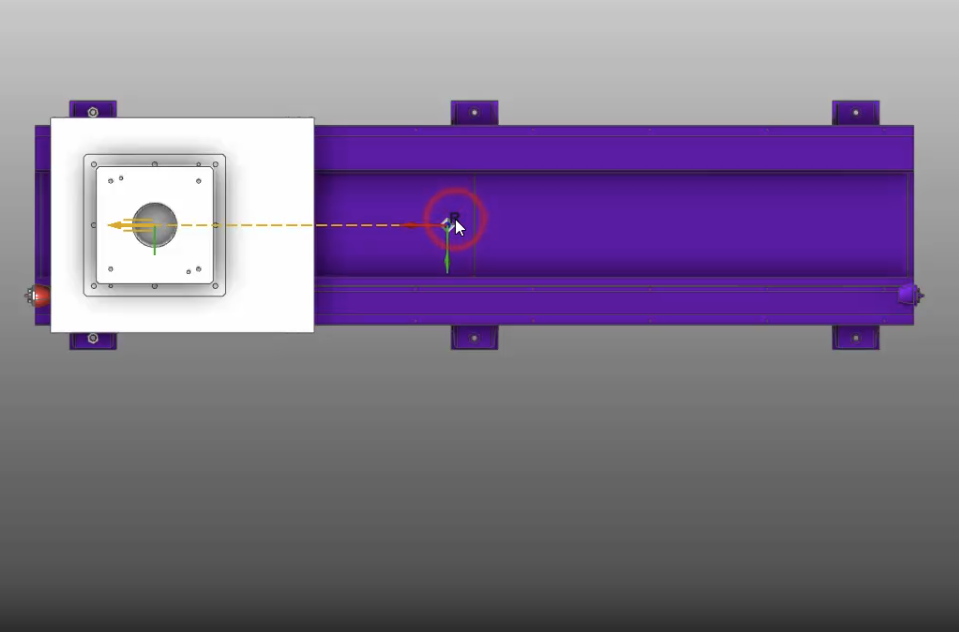
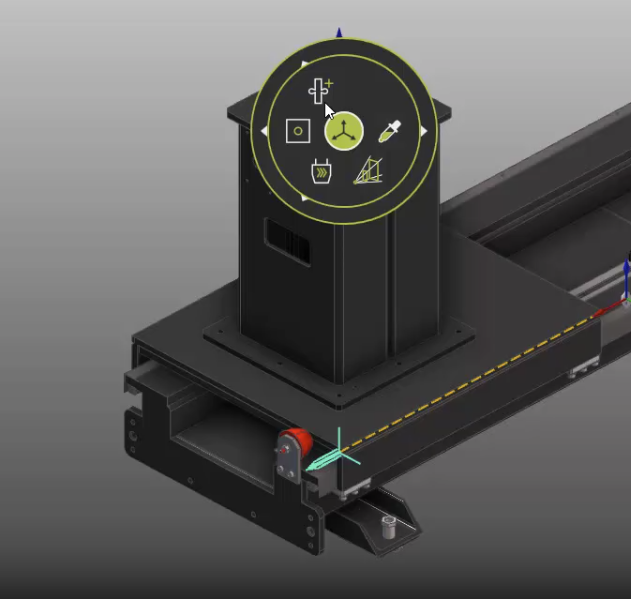
选择操作球,将操作球移动到合适的位置(通过点选指令)
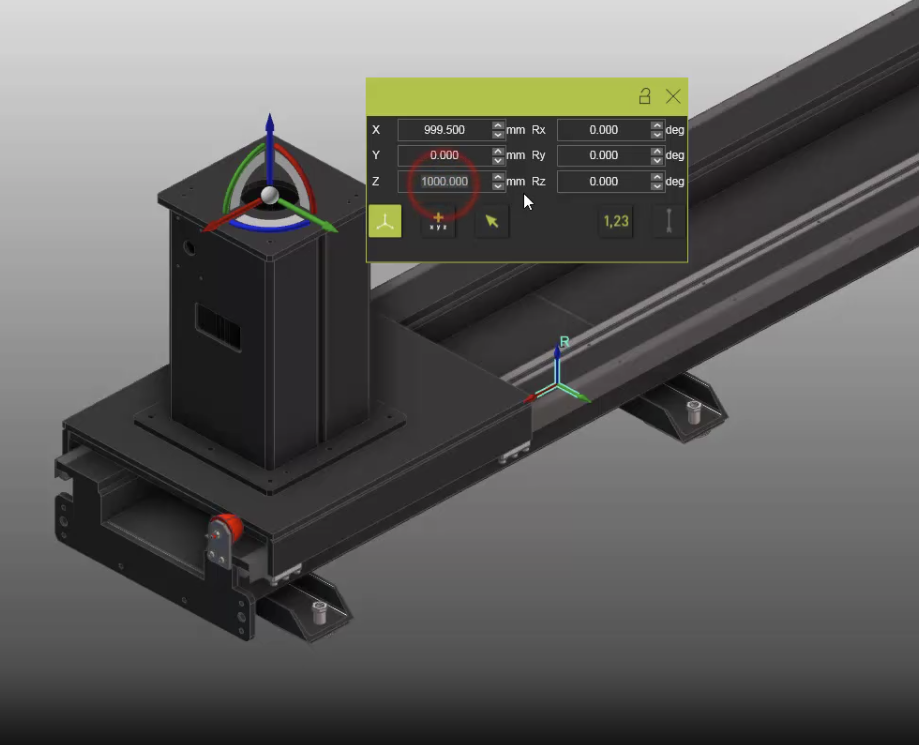
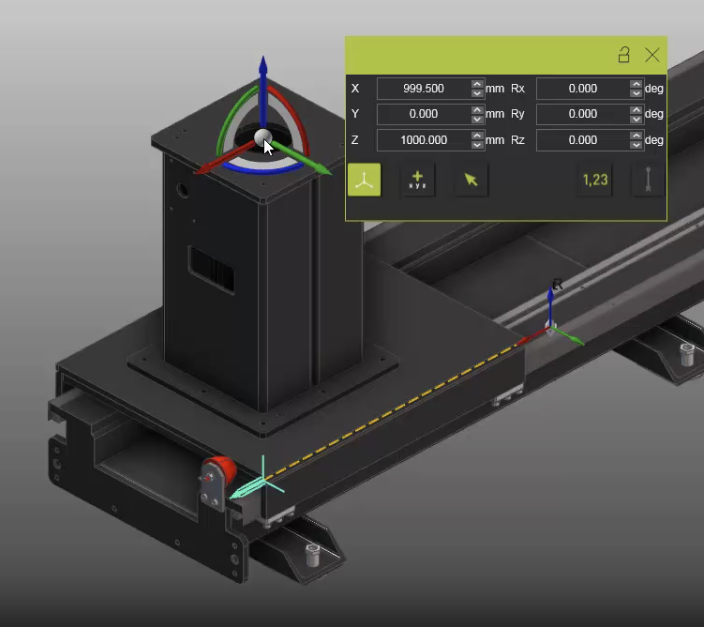
 左键操作球中心打开参数面板,调整参数使其挪动到正确位置
左键操作球中心打开参数面板,调整参数使其挪动到正确位置
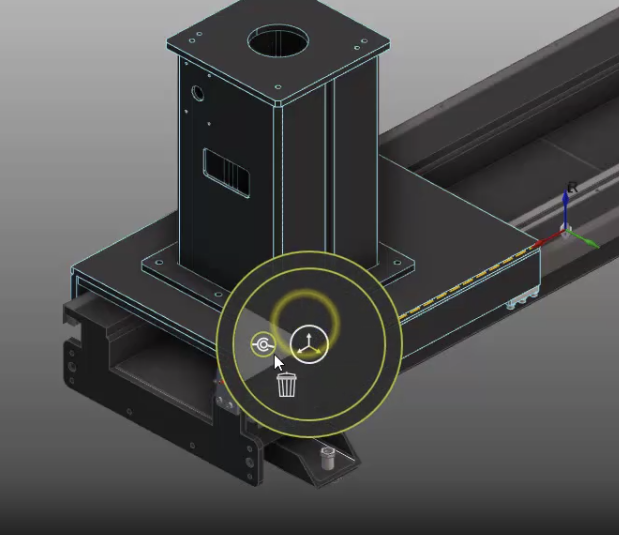
 右键点击红色X轴建立直线运动轴
右键点击红色X轴建立直线运动轴
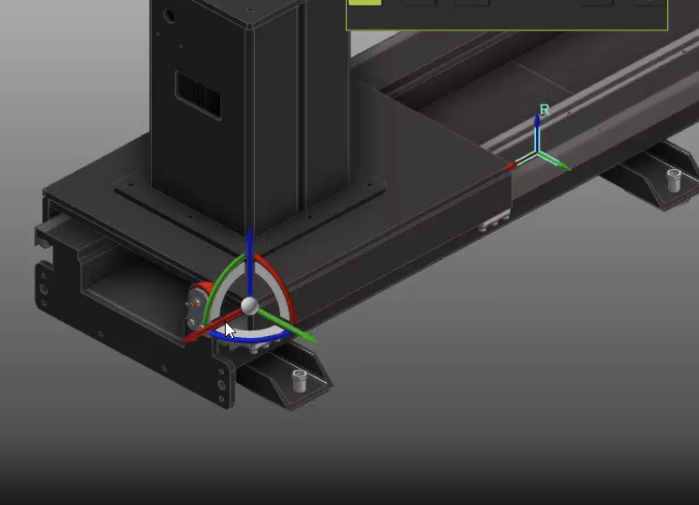 在弹出的饼图里选择直线运动轴
在弹出的饼图里选择直线运动轴
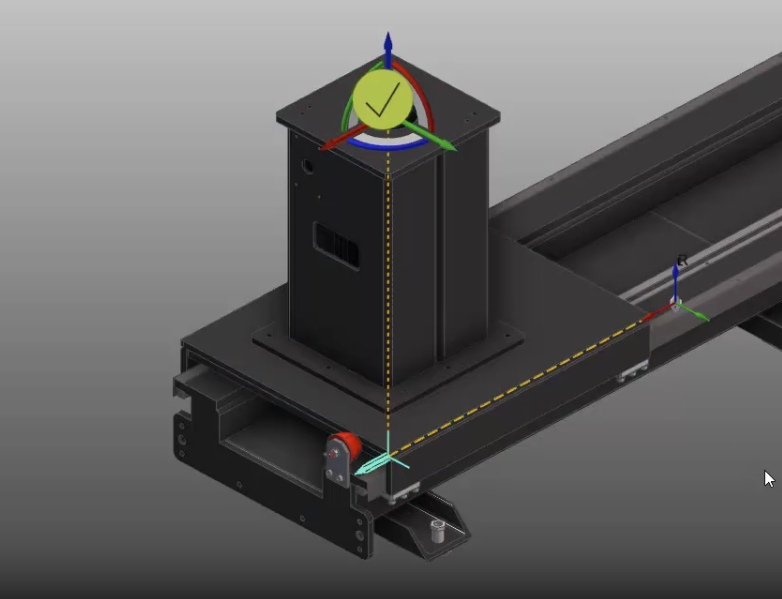
 进一步地,选择创建沿X轴平移的联动轴环节
进一步地,选择创建沿X轴平移的联动轴环节
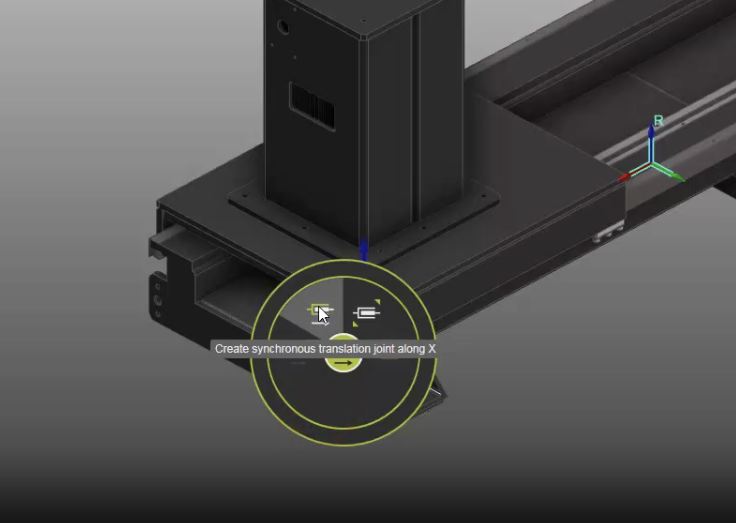 如此,直线运动轴便建立好了
如此,直线运动轴便建立好了
3.建造轨道资源几何¶
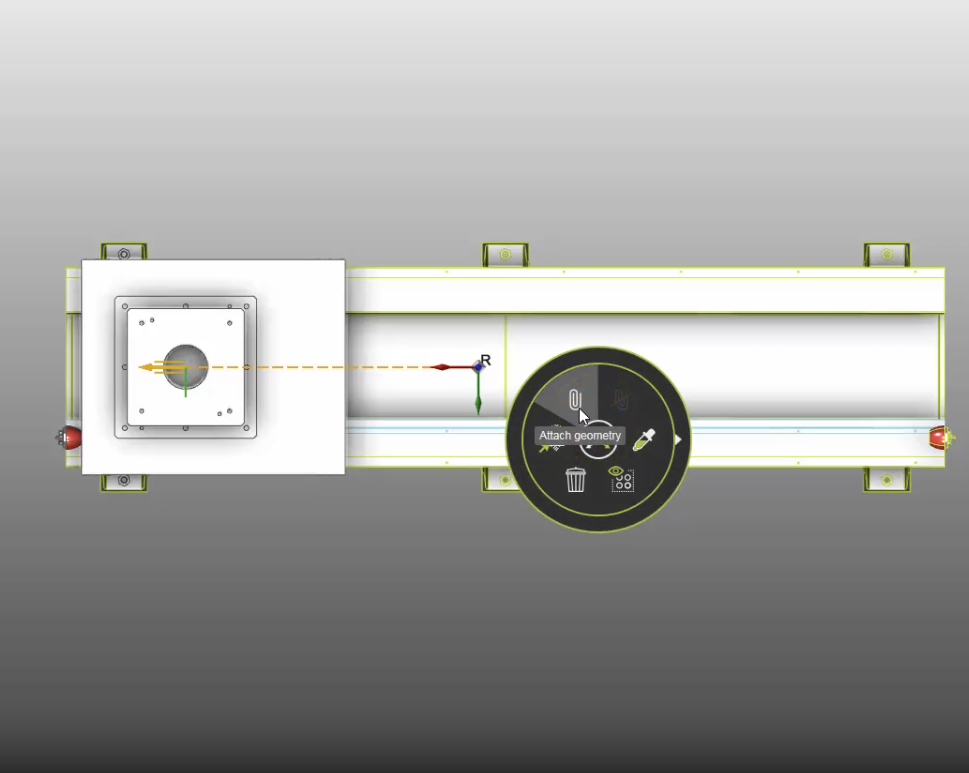
 3.1 将导入几何体的轨道部分附加到轨道资源的基础固定部分。¶
3.1 将导入几何体的轨道部分附加到轨道资源的基础固定部分。¶
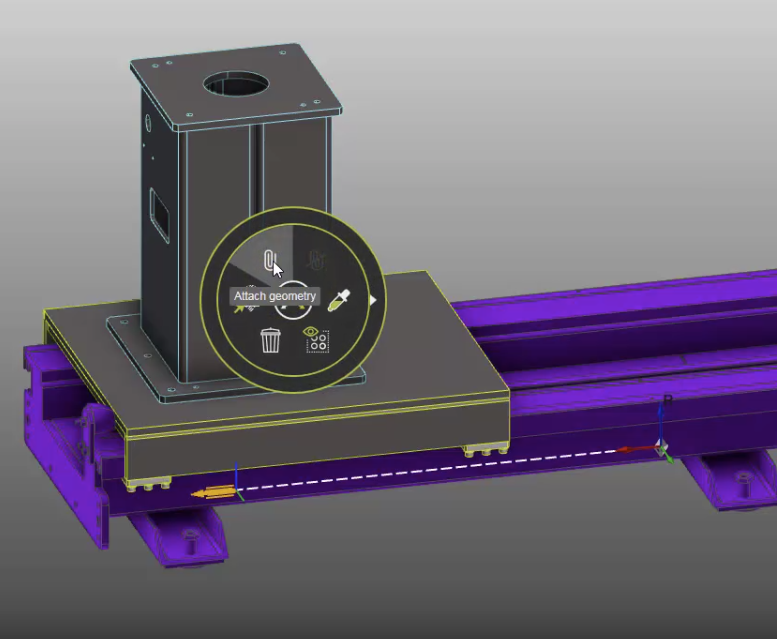
切换到几何模式
 使用关连选项将轨道基座的几何图形与坐标系关联(注意并非关联到运动轴上)
使用关连选项将轨道基座的几何图形与坐标系关联(注意并非关联到运动轴上)
 点击基础坐标系完成几何关联
点击基础坐标系完成几何关联
3.2 将将轨道几何体的可移动基座部分附加到轨道资源的线性运动关节上。¶
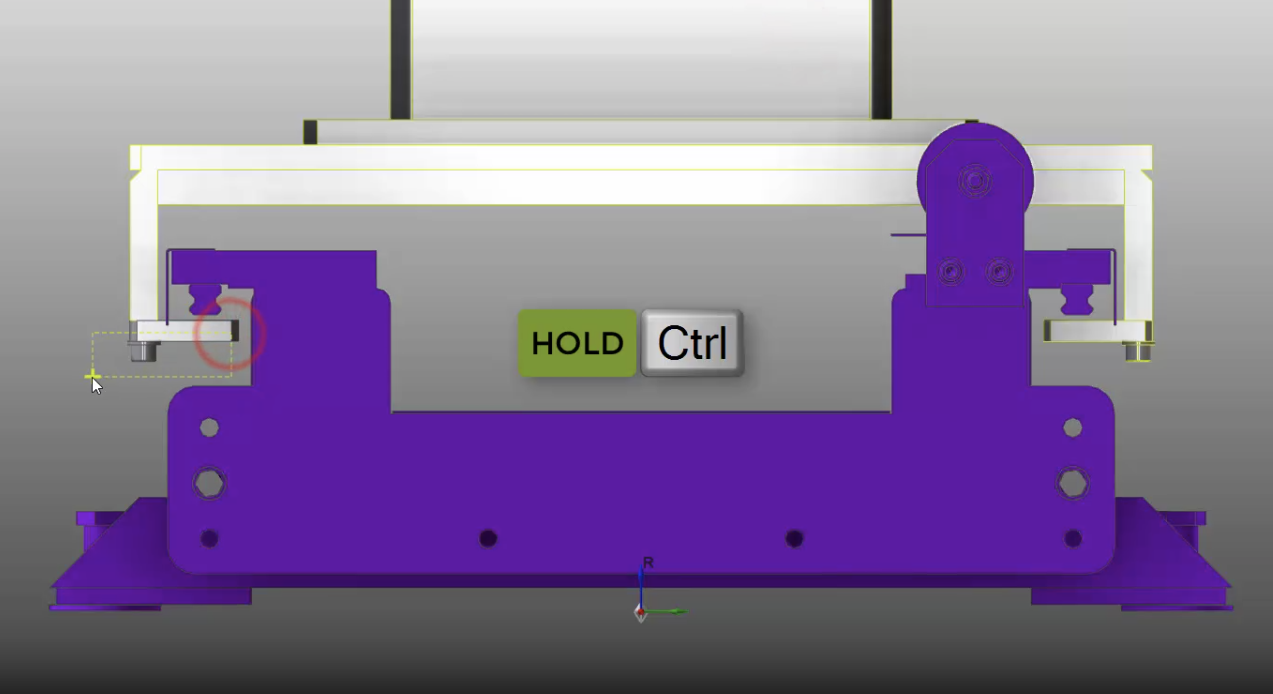
按住Ctrl,避开已经关联的部分,使用框选快速选择其他未关联的部分(可移动基座)
 使用关连选项将轨道基座的几何图形与运动轴关联
使用关连选项将轨道基座的几何图形与运动轴关联
 点击线性运动轴完成关联
点击线性运动轴完成关联
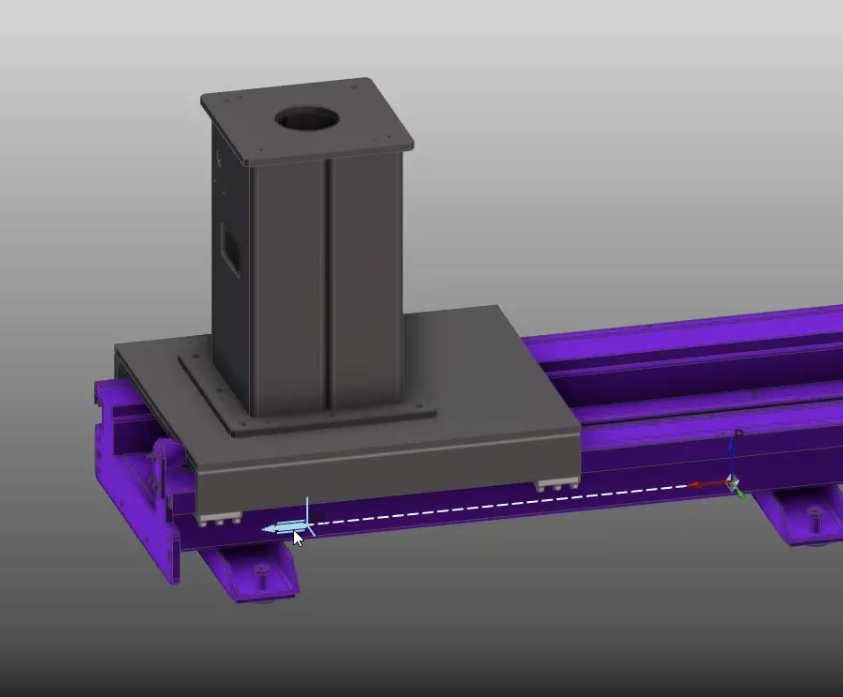 几何图形变色,关联已完成
几何图形变色,关联已完成
4.创建基座接口¶
基座接口稍后用于将机器人连接到轨道上。保证了机器人在仿真过程中会随底座移动。
从左侧菜单里选择接口模式
 选择可移动基座设置为活跃化的轴关节/坐标系(否则会自动将接口设置到轨道基座上)
选择可移动基座设置为活跃化的轴关节/坐标系(否则会自动将接口设置到轨道基座上)
 打开操作球,使用点取命令移动到正确坐标
打开操作球,使用点取命令移动到正确坐标
 右键操作球,选择创建新接口
右键操作球,选择创建新接口
 在饼图子菜单中,选择创建机械类父接口
在饼图子菜单中,选择创建机械类父接口
 创建完成,可以见到相关关联线
创建完成,可以见到相关关联线
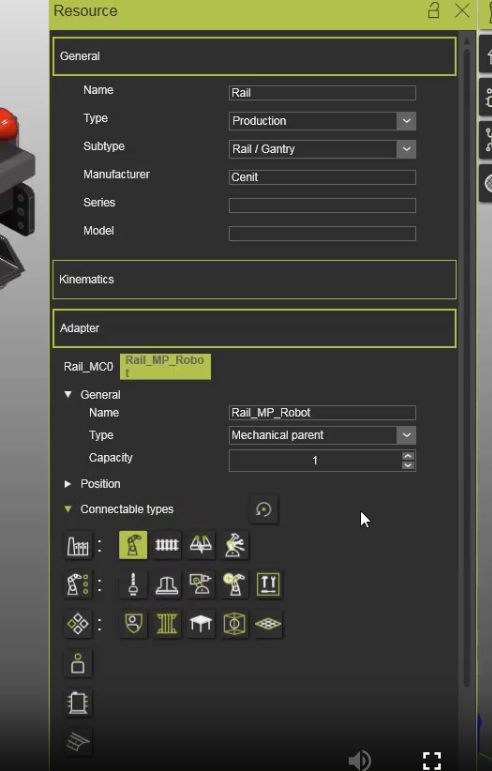
 5.1 为轨道资源指定一个适当的名称。并定义接口的属性。
5.1 为轨道资源指定一个适当的名称。并定义接口的属性。 在弹出的菜单里修改资源名称,接口属性。
可以通过开关链接类型控制接口连接的数量,类型。
在弹出的菜单里修改资源名称,接口属性。
可以通过开关链接类型控制接口连接的数量,类型。
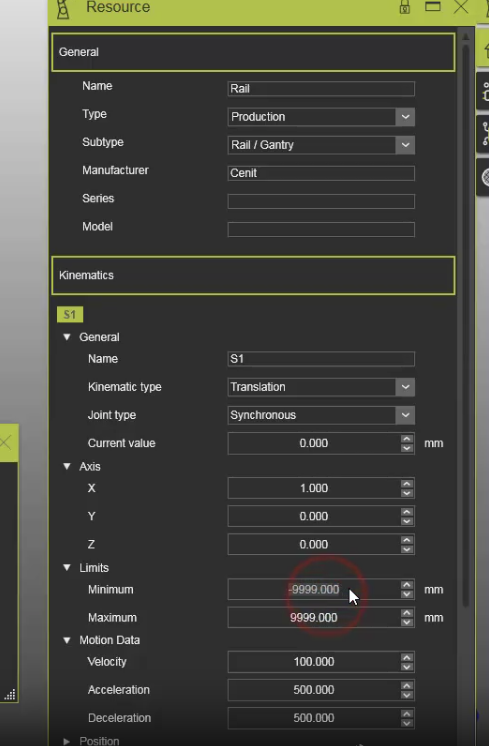 修改限制
修改限制
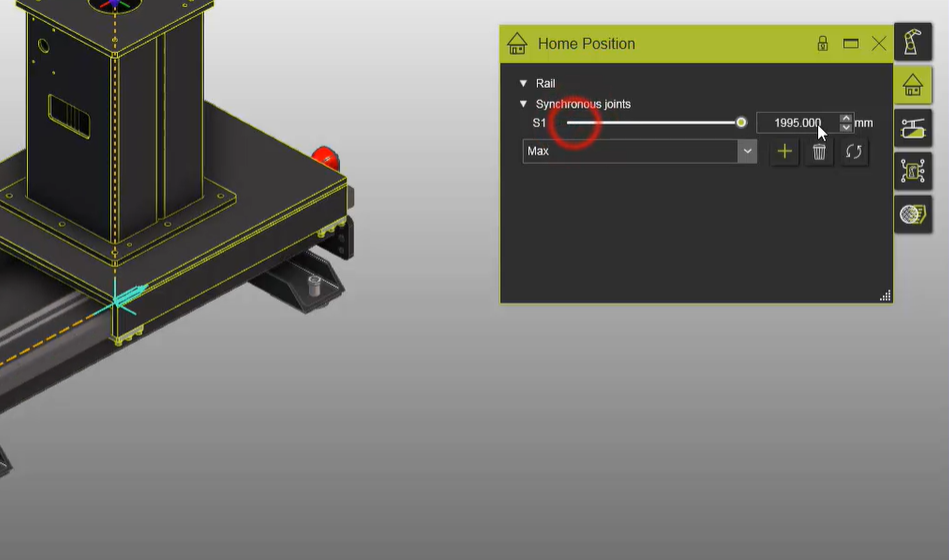
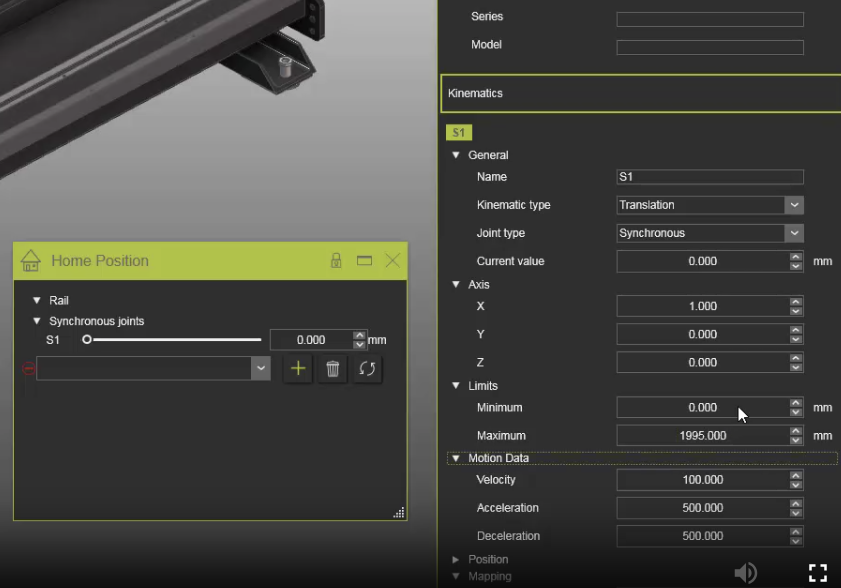 在预设仪表盘位置里可以发现限制轨道资源已经有了行程限制
在预设仪表盘位置里可以发现限制轨道资源已经有了行程限制
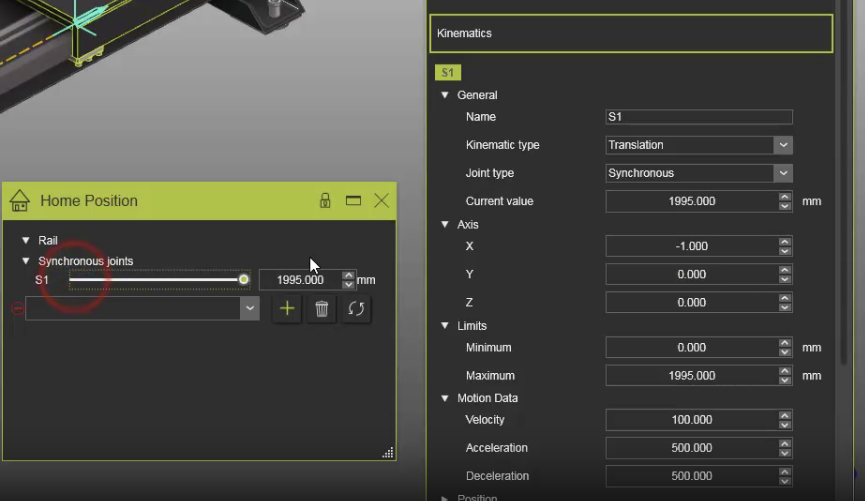
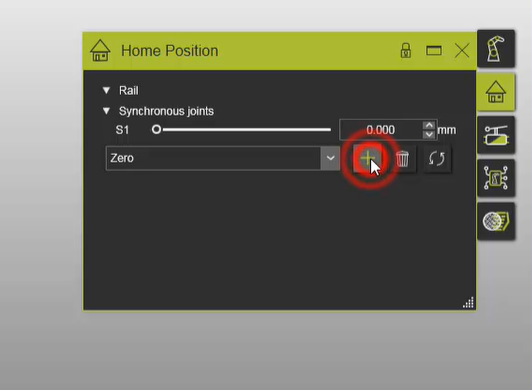 修改轨道预设仪表盘位置,点击加号再次建立一个起始位置。此处为行程最大时的位置
修改轨道预设仪表盘位置,点击加号再次建立一个起始位置。此处为行程最大时的位置