建立工件变位机¶
步骤¶
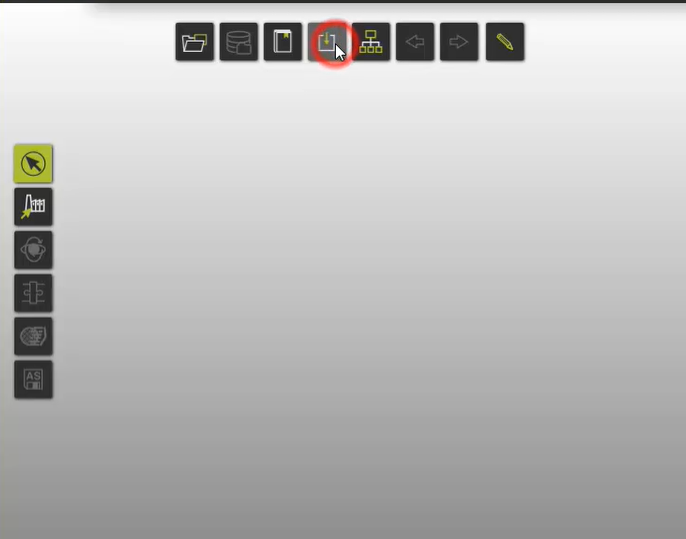
 1.1 切换到资源创建工作台
1.1 切换到资源创建工作台2.定义变位机资源¶
 2.1 从文件中导入变位机的几何体模型。X_b,它位于本手册的安装驱动器上。¶
2.1 从文件中导入变位机的几何体模型。X_b,它位于本手册的安装驱动器上。¶
 2.2 为这个导入的变位机创建一个新的工件变位机类型资源。¶
2.2 为这个导入的变位机创建一个新的工件变位机类型资源。¶
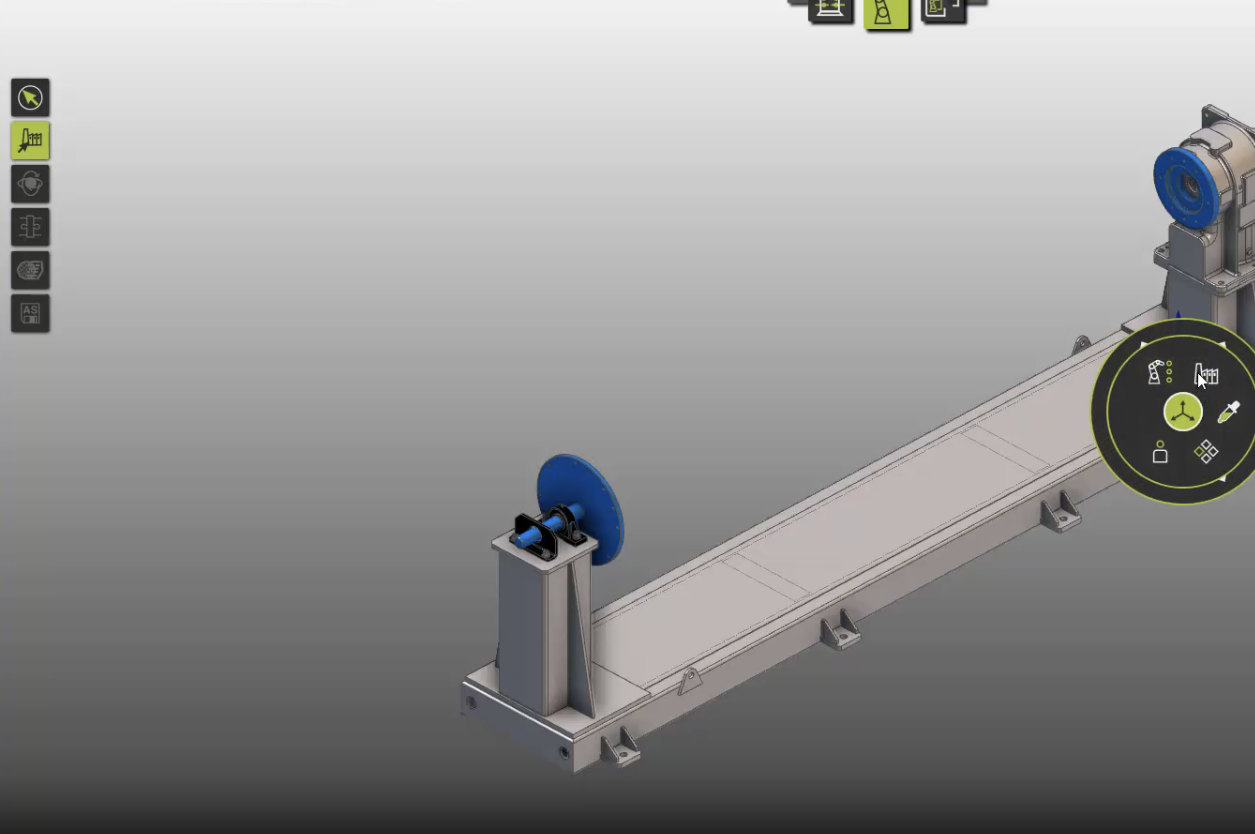
左侧菜单切换到创建资源选项,在右侧右键拖出操作球,右键操作球中心打开饼图菜单,选择生产设备。
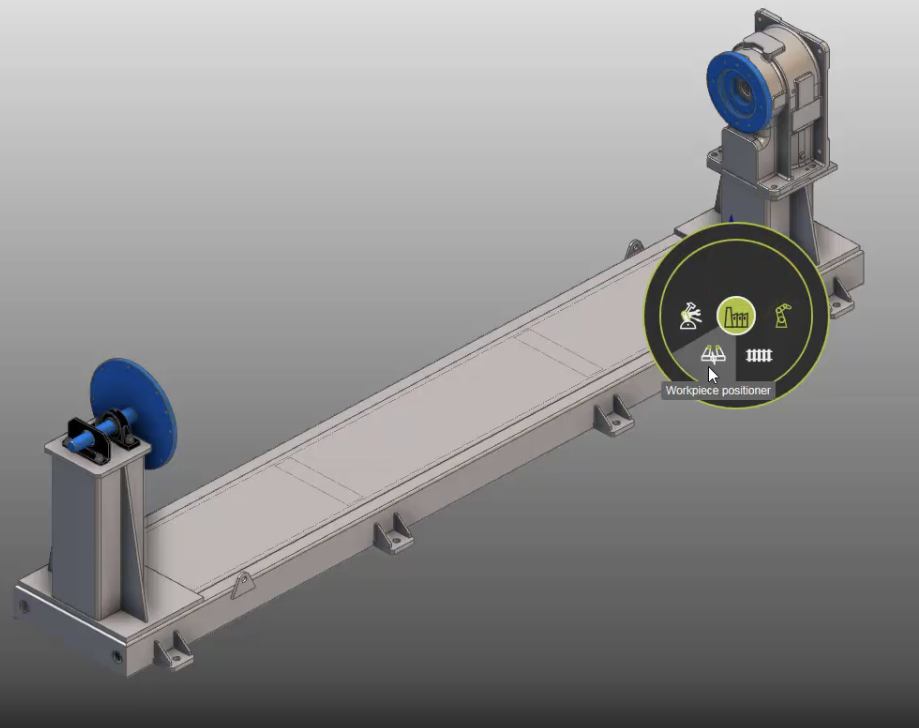
 在生产设备中选择变位机并创建。
在生产设备中选择变位机并创建。
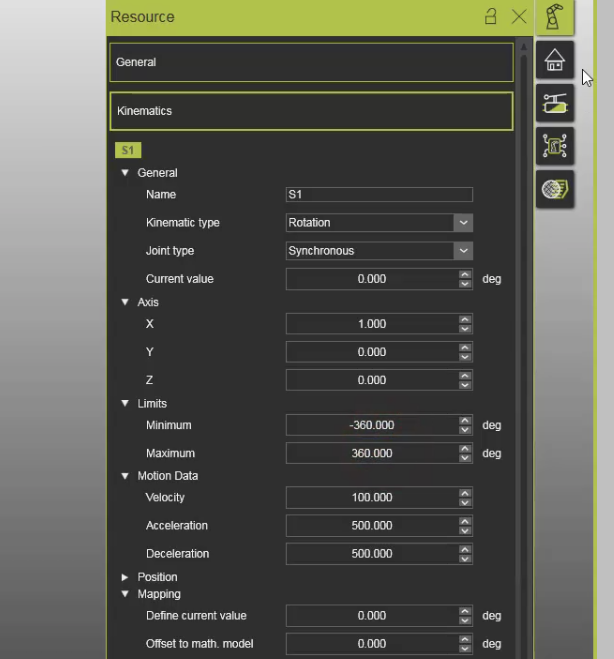
2.3 创建变位机的运动学骨架。变位机将有一个(同步)旋转运动。¶
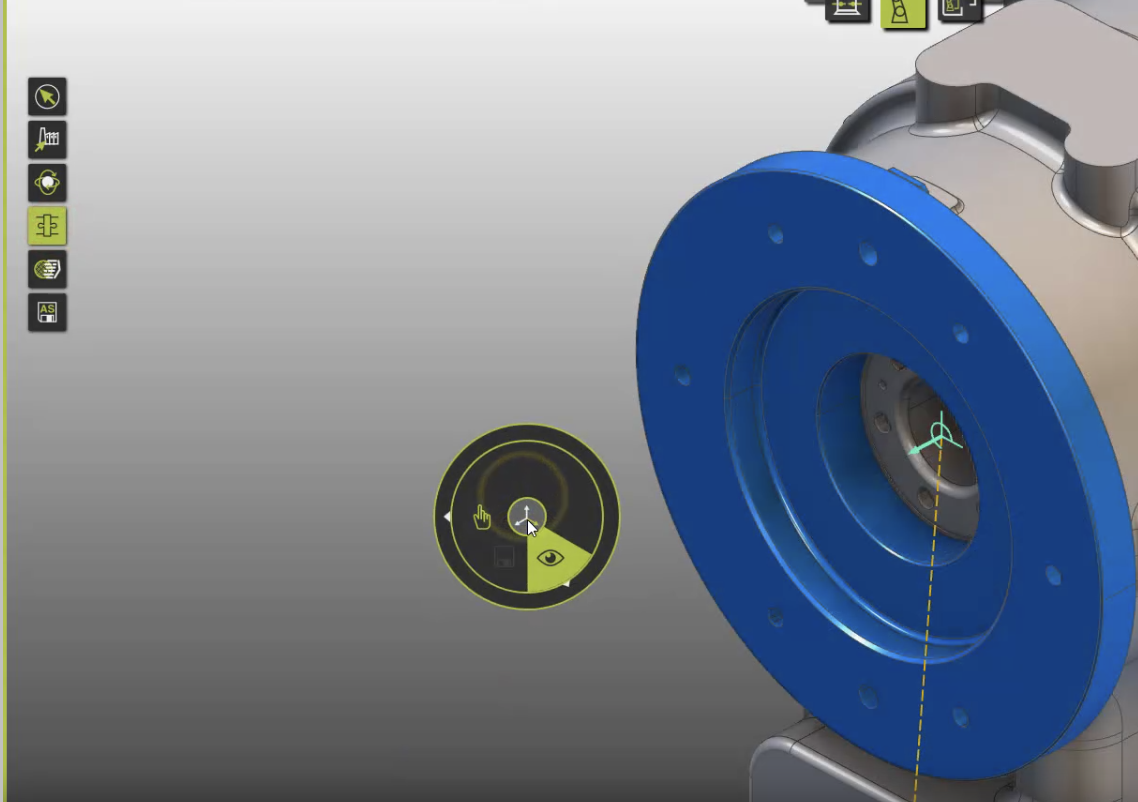
为了正确建立运动学,我们需要选择正确的空间坐标。打开操作球的点取命令。
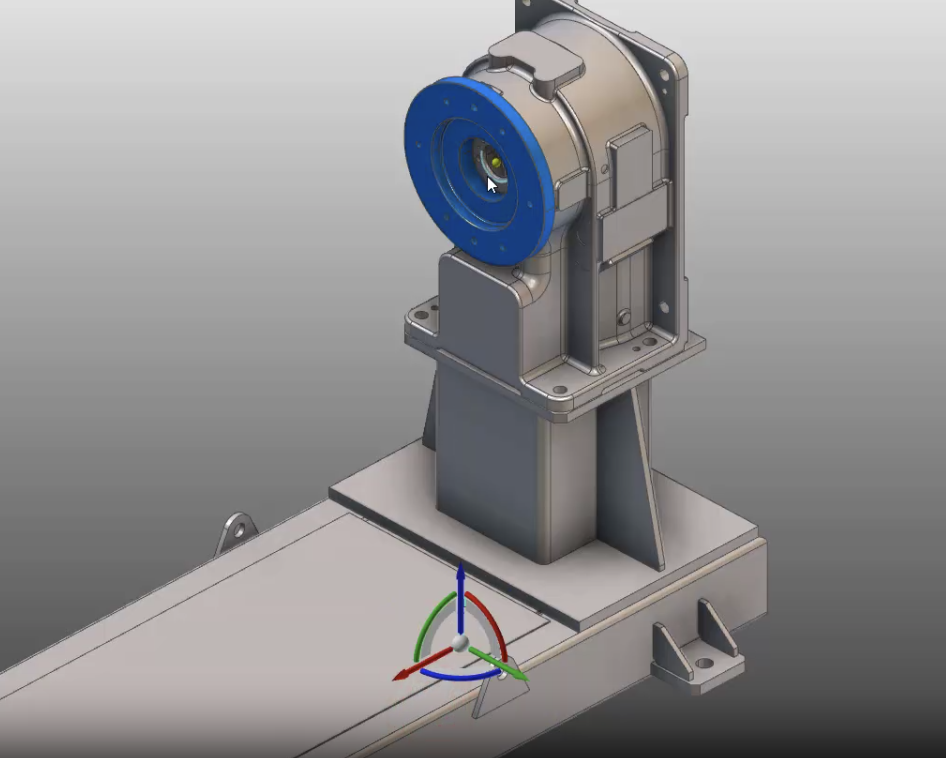 通过点取圆心功能正确选择坐标位置。(绿色球心)
通过点取圆心功能正确选择坐标位置。(绿色球心)
 左键生成操作球,右键红色X轴建立沿X轴方向的运动学。
左键生成操作球,右键红色X轴建立沿X轴方向的运动学。
 选择创建围绕X轴的旋转关节
选择创建围绕X轴的旋转关节
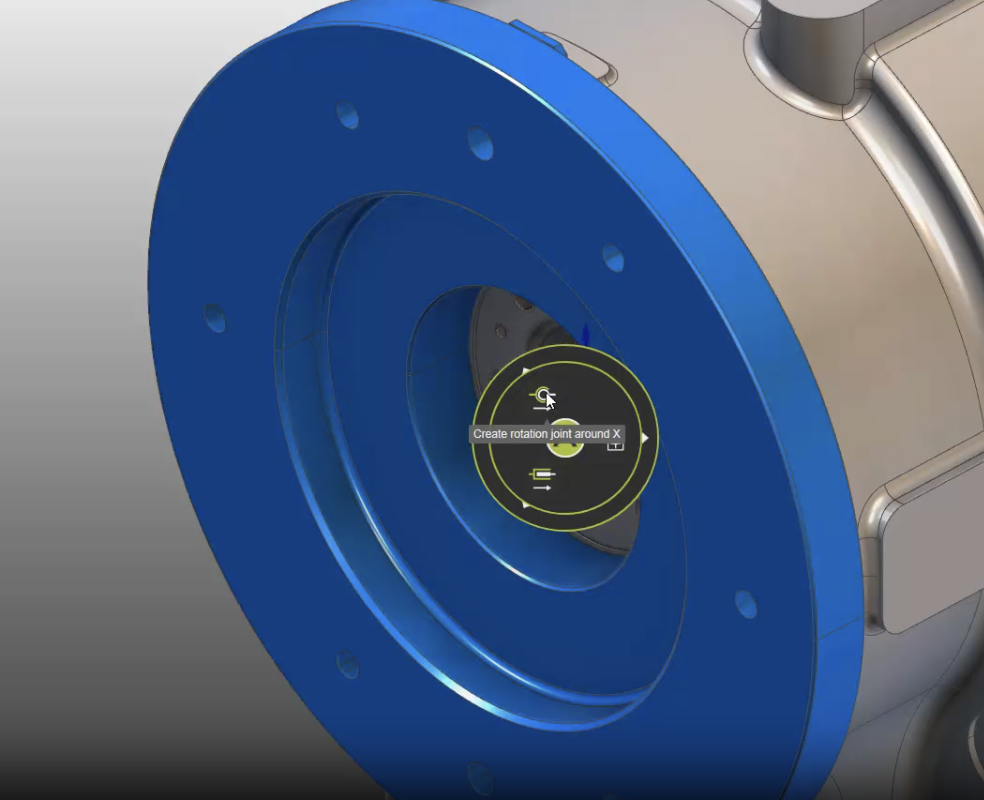 选择创建围绕X轴旋转的联动轴环节
选择创建围绕X轴旋转的联动轴环节
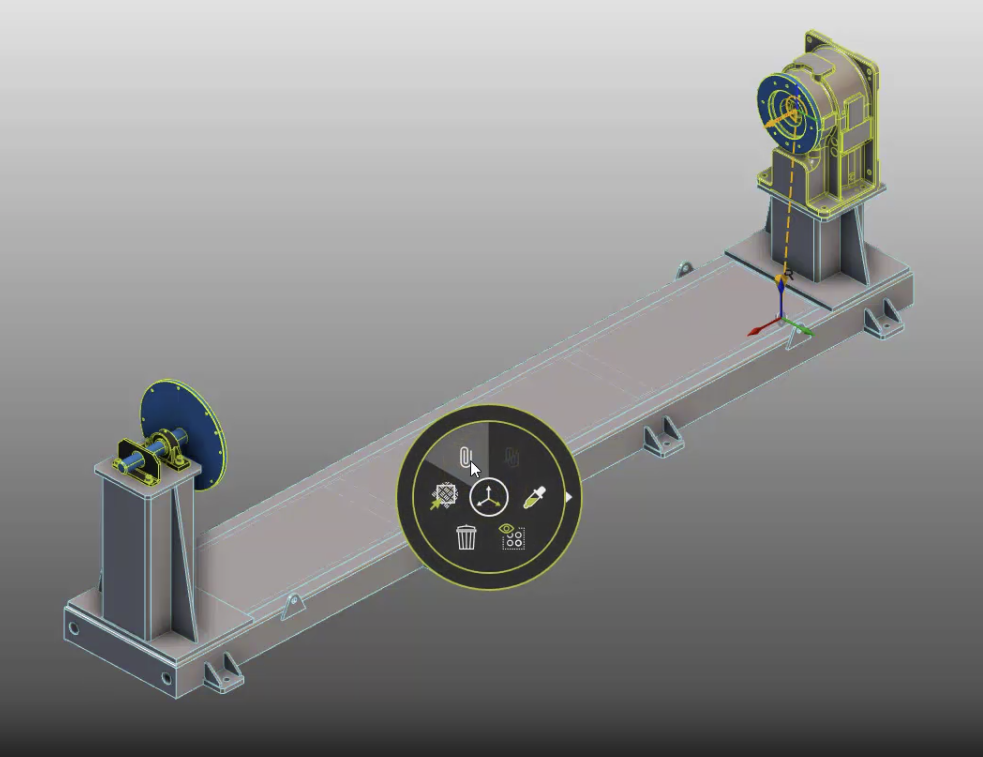
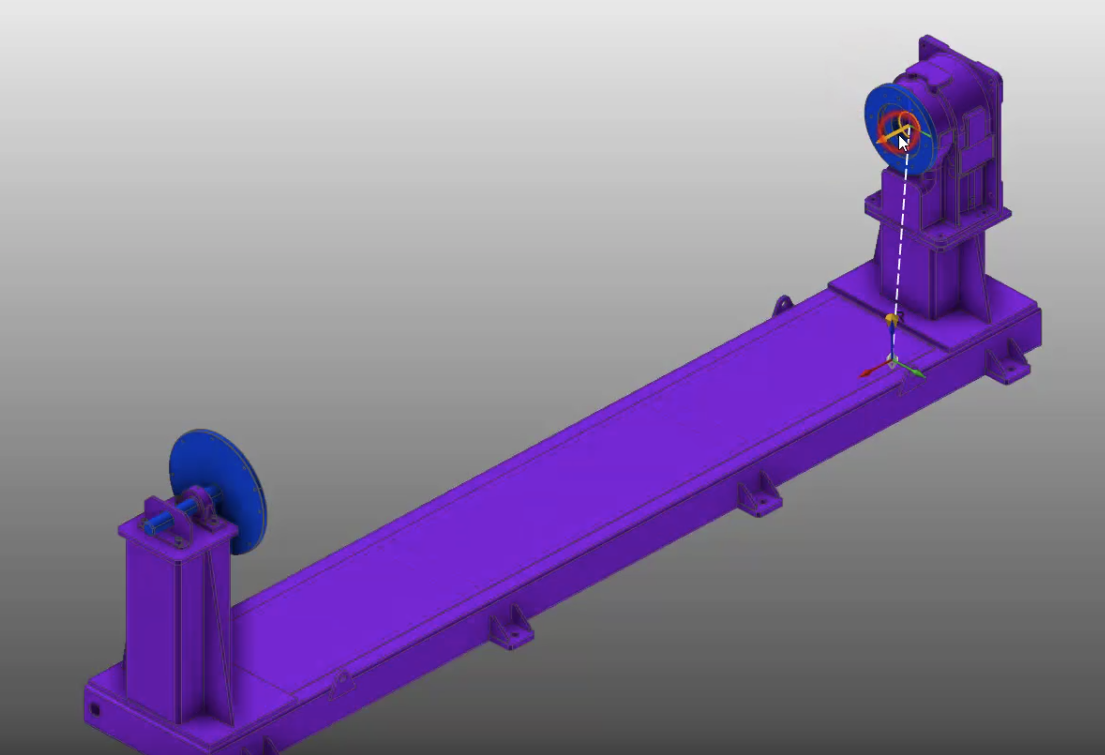
 确定生成后可以看见一条连接基座标的虚线。
确定生成后可以看见一条连接基座标的虚线。
3.创建变位机资源模型¶
 3.1 将导入几何体的框架部分附加到变位机资源的底座固定部分上。¶
3.1 将导入几何体的框架部分附加到变位机资源的底座固定部分上。¶
从左侧菜单选择几何模式。
 框选全部模型,右键打开饼图菜单,选择关联,点击基座标完成关联。
框选全部模型,右键打开饼图菜单,选择关联,点击基座标完成关联。
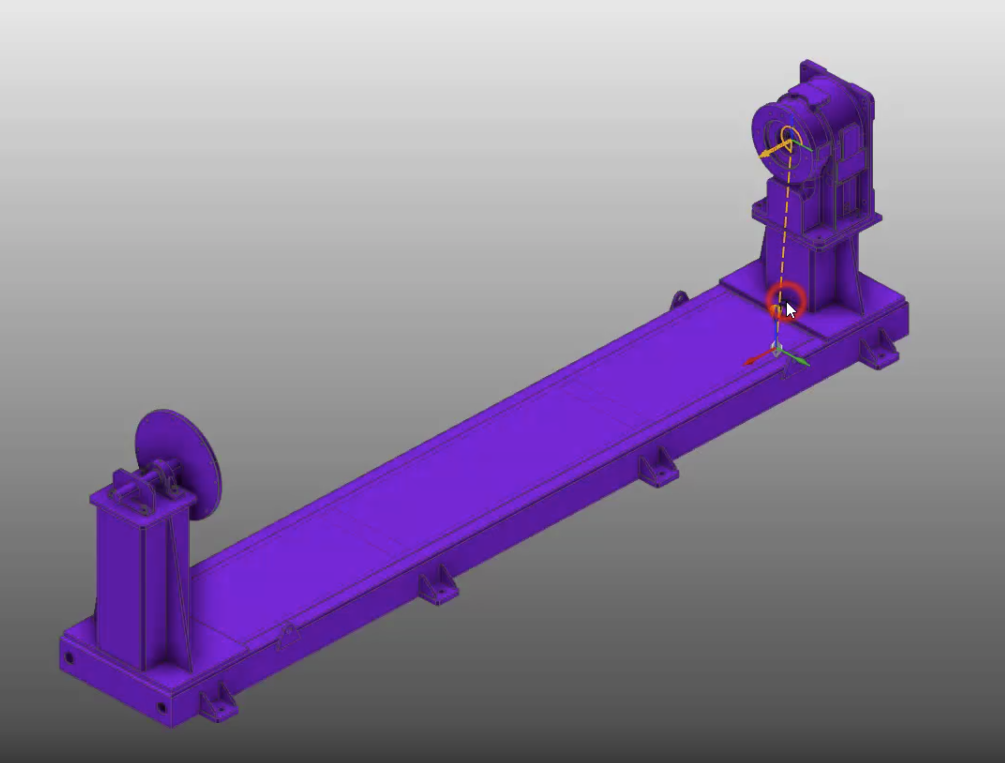
 模型变色,完成关联。
模型变色,完成关联。
3.2 将变位机几何图形的旋转夹具附加到定位器资源的旋转关节上。¶
按住Ctrl,分别点选左右两个圆形转盘(用于旋转工件)
 右键呼出饼图菜单,选择关联。此时可见选择的转盘部分有黄色边缘线。
右键呼出饼图菜单,选择关联。此时可见选择的转盘部分有黄色边缘线。
 点击已建立好的旋转轴完成关联。可以见到完成关联后分属不同颜色。
点击已建立好的旋转轴完成关联。可以见到完成关联后分属不同颜色。
4.创建夹钳接口¶
夹钳接口将在稍后的步骤里,将工件固定在变位机中。它保证了在模拟过程中工件将随着变位机的旋转而旋转。
在左侧菜单切换到接口模式,接着唤出操作球。
 将操作球吸附于变位机表面,接着左键操作球中心打开坐标面板,切换到相对于当前位置的位移。
将操作球吸附于变位机表面,接着左键操作球中心打开坐标面板,切换到相对于当前位置的位移。
 关闭操作球面板,右键关联后的变位机(旋转轴关联的部分),点击设置活跃状态。
关闭操作球面板,右键关联后的变位机(旋转轴关联的部分),点击设置活跃状态。
 此刻操作球应当移动到之前建立旋转轴的地方,此处再次左键操作球中心,打开参数面板。将Z轴设置为0,使操作球来到变位机表面。
此刻操作球应当移动到之前建立旋转轴的地方,此处再次左键操作球中心,打开参数面板。将Z轴设置为0,使操作球来到变位机表面。
 现在操作球位于正确位置,右键操作球选择左下角创建特定接口。
现在操作球位于正确位置,右键操作球选择左下角创建特定接口。
 选择创建工件接口,即可设置正确的工件夹钳接口。
选择创建工件接口,即可设置正确的工件夹钳接口。

 5.1 给变位机资源起一个合适的名字。并定义接口和框架的属性。
5.1 给变位机资源起一个合适的名字。并定义接口和框架的属性。 在接口栏设置对应的连接类型和数量。
在接口栏设置对应的连接类型和数量。
 下拉接口栏打开框架,将框架命名为BF_Positionner。
下拉接口栏打开框架,将框架命名为BF_Positionner。

 调整运动学限位
调整运动学限位
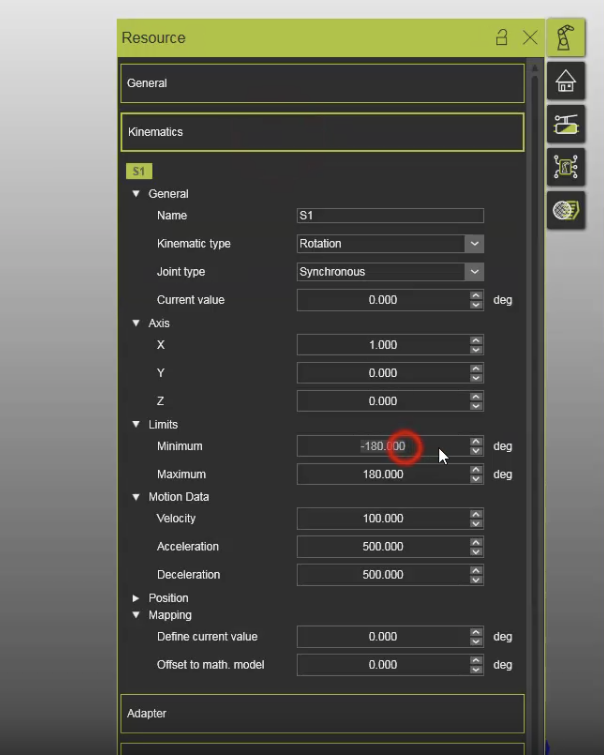 按照合适的角度调整运动学限位
按照合适的角度调整运动学限位
 在预设仪表盘验证对应的限位是否实现
在预设仪表盘验证对应的限位是否实现
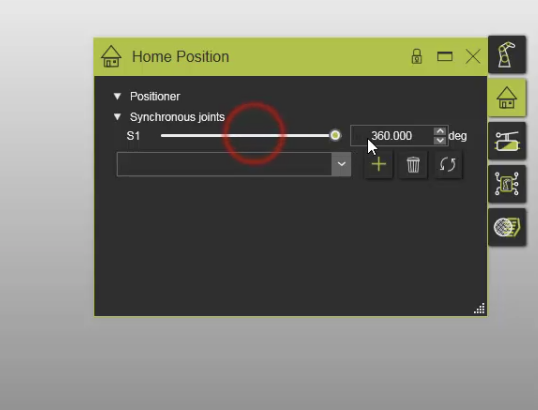
 将行程调到最小,并修改名字为Max,点击加号保存当前最小行程。
将行程调到最小,并修改名字为Max,点击加号保存当前最小行程。
