FASTSUITE 点焊基础教学¶
第一节:创建工件¶
1. 首先定义工件¶
切换至工件准备工作台:
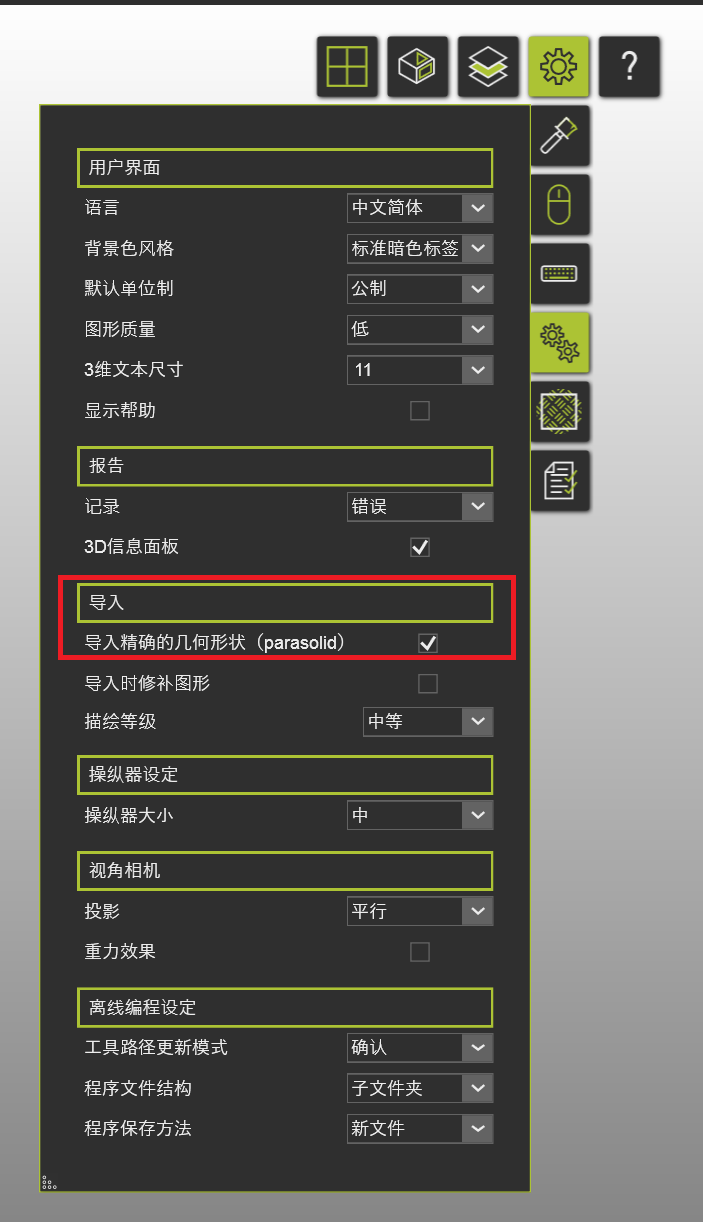
在导入几何图形之前,需要检查E2的导入设置,打开设置页面中的通用设定-导入通用的几何形状:
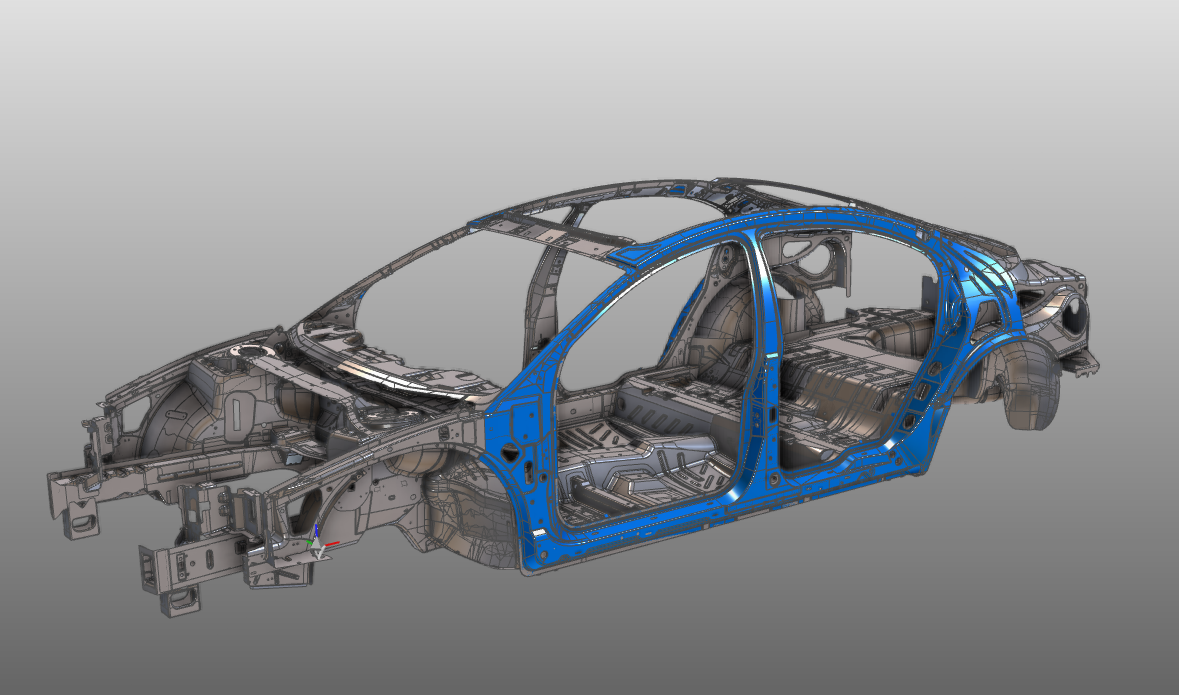
导入课前准备下载的资源文件
BIW_Spot_Welding_Body.cgr(可以直接拖拽文件至E2中,也可以通过左上角文件-打开-文件浏览器中选择该文件打开)。提示:请参照Tips&Tricks中的直接导入工件技巧,按住W拖拽文件可以直接建立E2的工件资源。关联工件的几何特征,并保存工件文件:
2. 完成工件创建之后,我们需要定义加工轨迹¶
首先选择文件菜单栏中的导入选项,选择
BIW_Spot_Welding_Spots.xml文件:在导入文件之后,会生成提前定义好的焊接点,如果需要手动添加焊接点,首先需要将轨迹定义为点 :
通过使用操作器,可以在工件的任意位置上创建点焊工作点:
完成创建后,可以点选工作台工具栏中的保存按键,将工件文件保存。
第二节:创建焊枪¶
1. 创建工具¶
切换至资源创建工作台:

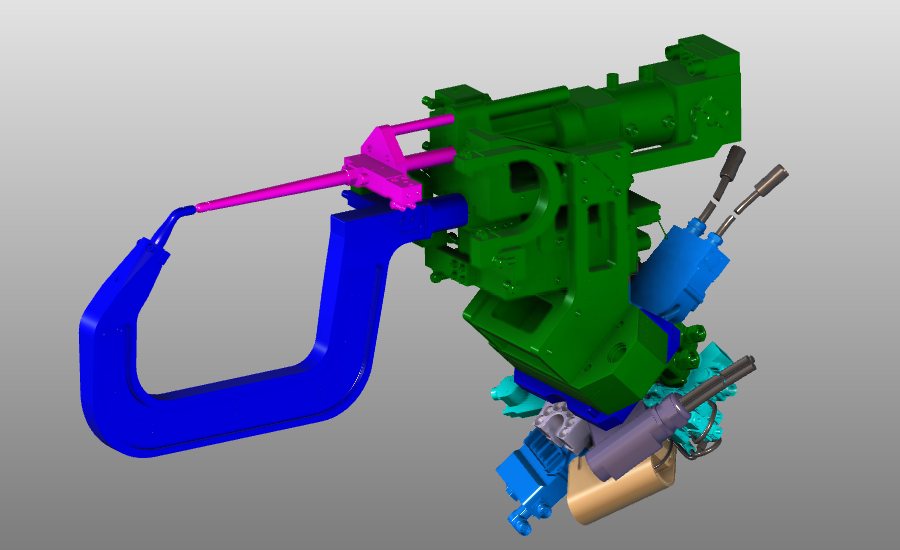
将
C-Type Weld Gun Spot Fix.cgr and C-Type Weld Gun Spot Mobile.cgr文件导入E2中;将焊枪定义为工具资源:
2. 创建运动副¶
由于焊枪有多个运动自由度,在关联几何特征前需要进行运动副的定义创建。首先将操作器放置在如下坐标,并创建驱动平移关节:

将焊枪的运动部分几何特征与平移轴关联(视频中对几何特征编辑时使用了几何图形模式按钮进行辅助,也可以直接双击鼠标左键来选择几何关联体):
将焊枪剩余部分与其基座标关联,这样就得到了一个有完整几何资源的焊枪:
最后将隐藏的几何体取消隐藏:
3. 定义关节运动参数¶
首先对焊枪的运动关节进行参数设定:
设定焊枪的零位,除零位之外还可以设定多个位置,方便在离线编程时进行设定:
在如图中坐标点中创建一个工具坐标,也就是在编程中需要的工具TCP坐标:

最后,使用资源创建工作台工具栏中的保存按键,将焊枪件文件保存。
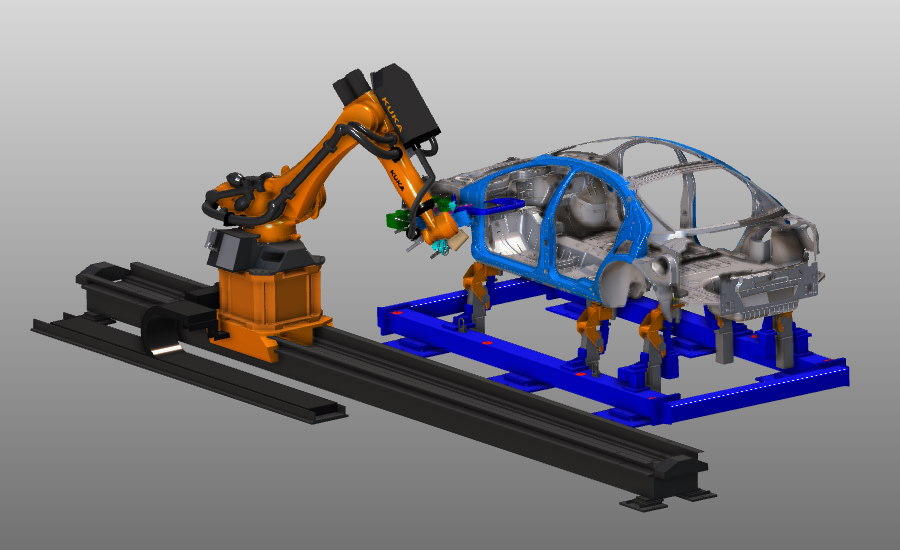
第三节:创建点焊工程¶
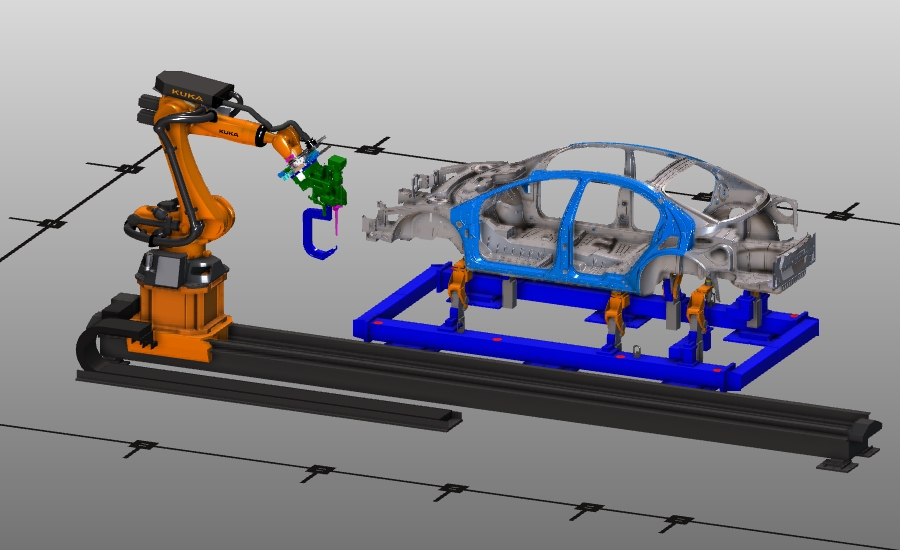
1. 首先我们需要创建一个布局,将编程所需的资源和工件放置在预设的位置¶
切换至布局工作台:
加载布局所需的文件至E2中(可以通过拖拽的方式,也可以像视频中使用工程架构中的打开):
同上,加入刚才建立的焊枪和工件;
在下载的文件中提前建立好了资源和工件的连接点,可以通过拖拽的方式建立布局:
通过拖拽电气口标志,将机器人和控制箱连接,从而使机器人变为可编程状态:
在布局规划工作台中,可以进行布局的保存。前提在于将布局中包含的元素在本地完成了保存,否则在保存时会一并将所有子项进行存储。
2. 创建离线编程时使用的碰撞组¶
首先切换至离线编程工作台:
在操作模式按钮中选择碰撞组,并定义车身和焊枪的碰撞体积:
在仿真播放器中的设置中设定碰撞组之间的检测规则:
第四节:创建离线编程程序¶
1. 准备¶
切换至离线编程工作台;
将机器人的工艺包选择为弧焊:
选择正确的工具坐标与基座标:
2. 对工件编程¶
首先对机器人的第一个工作点进行编辑,为了在程序运行时保证机器人的正常运行,程序的第一个点应当为机器人的初始状态。对机器人使用示教,程序会自动建立一个新的程序:
对工件编程(可以一次选择多个点):
在对工件完成编程后,可以进行一次仿真,对已经完成的程序是否有问题有一个初步的概念(打开仿真进度条上方的碰撞检测才会在仿真过程中检测碰撞的情况):
3. 优化¶
切换到工作台工具栏中的事件与示教:
检查各个点的状态:
为了解决碰撞的问题,我们可以在机器人的工作点上进行更改,在进行工作时一般只需要更改机器人工具的法向,在本节中即Z方向的旋转,以保证工具在工作的时候满足工艺要求:
对头、尾的路径点进行一次插值,使机器人在中间点的运动姿态尽量平滑(关于路径插值的使用请参照Tips&Tricks中的Interpolation一节):
为解决焊枪接近工件时的碰撞,在第一个工作点前插入一个点,作为进刀点,从而避免碰撞:
与第五步同理,在最后一个工作点后加入一个点,从而避免碰撞:
最终完成中间点插入后的效果如下:
4. 工艺¶
在程序面板中打开焊枪模拟,这会在每个工作点之前、之后添加几个点,并且为焊枪创建一个工作动作(两个视频分别是平动与旋转):
5. 其他¶
利用工作台工具栏中的示教按键,可以对路径点进行编辑(请参照Tips&Tricks中的快速示教一节来对示教点进行快速/精确编辑):
最后,可以使用监视器对机器人状态进行反馈:
6. 下载程序¶
点击工作台工具栏中的下载程序按钮,下载编辑完成的离线程序,注意程序面板中显示的程序下载的文件夹位置。
7. 保存¶
对工程的保存可以分为两种文件,Cendoc文件或工程文件。Cendoc文件可以通过文件-另存为中,选择保存文件类型为Cendoc。视频中为工程文件的保存: