生成并优化弧焊程序¶
目的¶
利用外部设备的运动能力优化编程,从而减小机器人轴线运动。¶
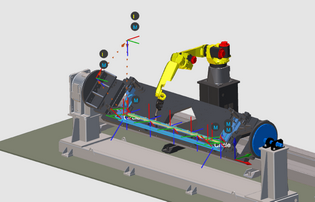
准备好的工作组件(由前面几个步骤的组件构建)来加载到项目中。焊接操作是已经编好的。该程序将通过插补外部设备的运动轴来优化,并且演示如何使用变位机。
 1.1 加载工作组件
1.1 加载工作组件
2. 在程序里移动机器人轨道¶
 2.1 生成焊接路径¶
2.1 生成焊接路径¶
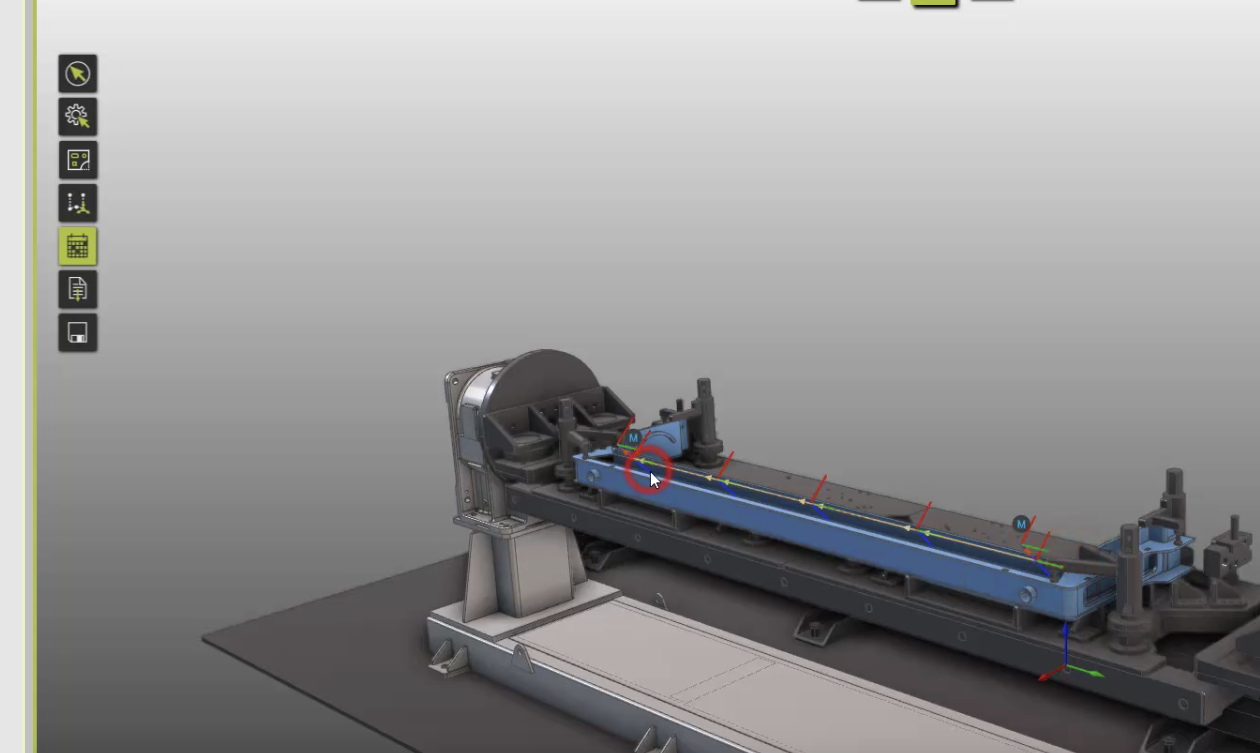
为完成此步,我们先将正上方的转盘旋转至离线编程的图标。并在在左边的菜单栏选择工具路径编程。
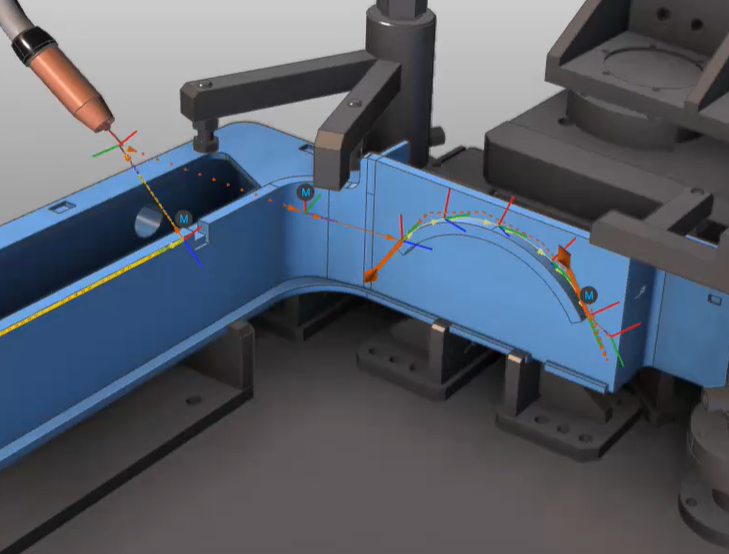
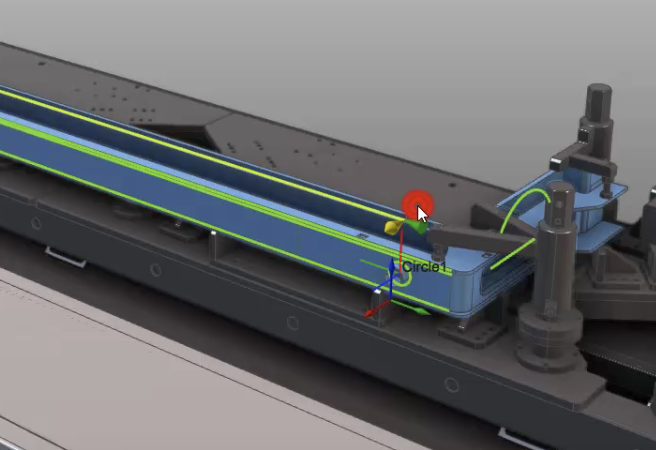
 接下来我们看向工件,工件已被预定义好。(生成了绿色的焊道。)
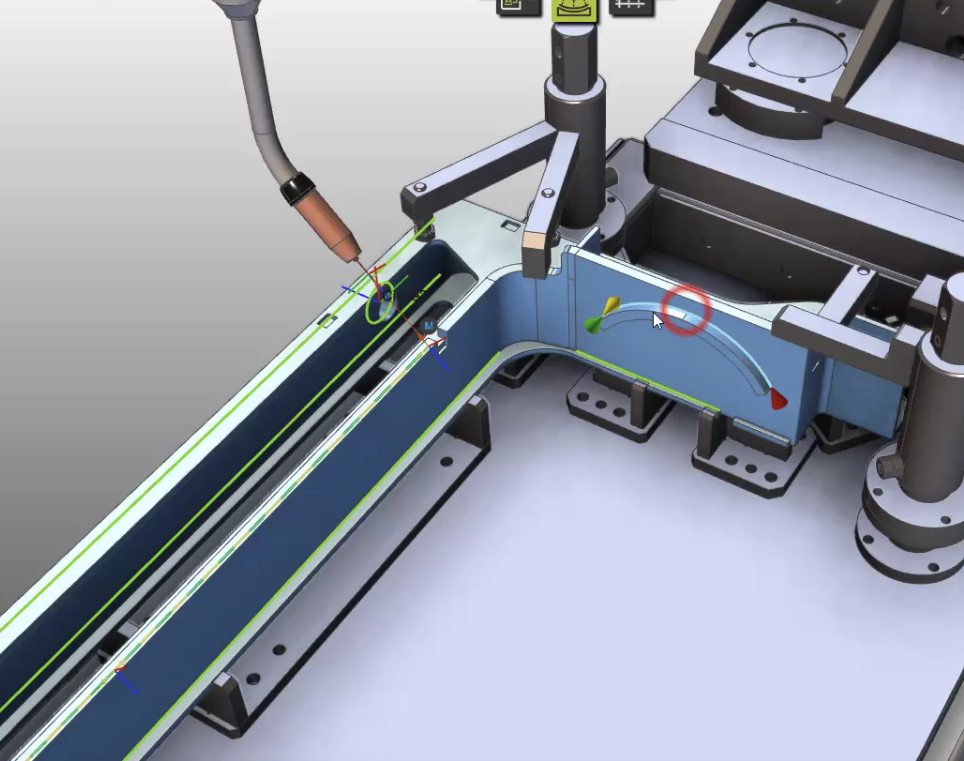
此处我们用鼠标左键双击切线上的黄色镜头,将切向改为对齐内测
接下来我们看向工件,工件已被预定义好。(生成了绿色的焊道。)
此处我们用鼠标左键双击切线上的黄色镜头,将切向改为对齐内测
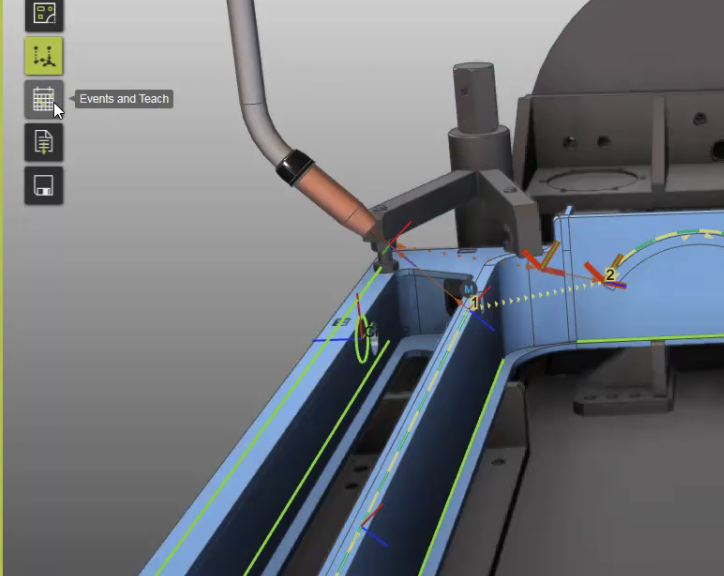
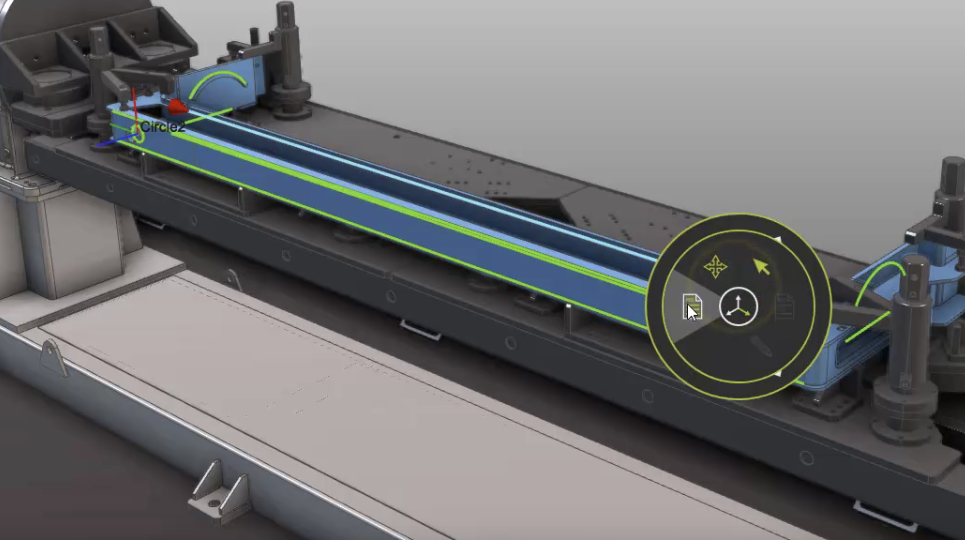
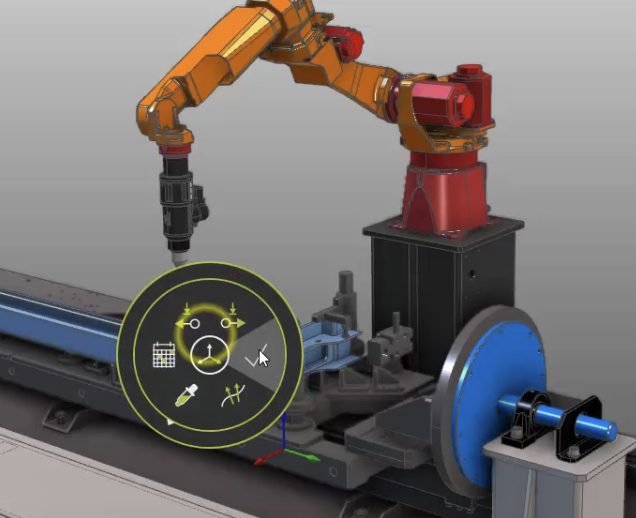
 再次右键焊道,在跳出的饼图子菜单里选择正右边的编程即可完成焊接路径的生成。
再次右键焊道,在跳出的饼图子菜单里选择正右边的编程即可完成焊接路径的生成。
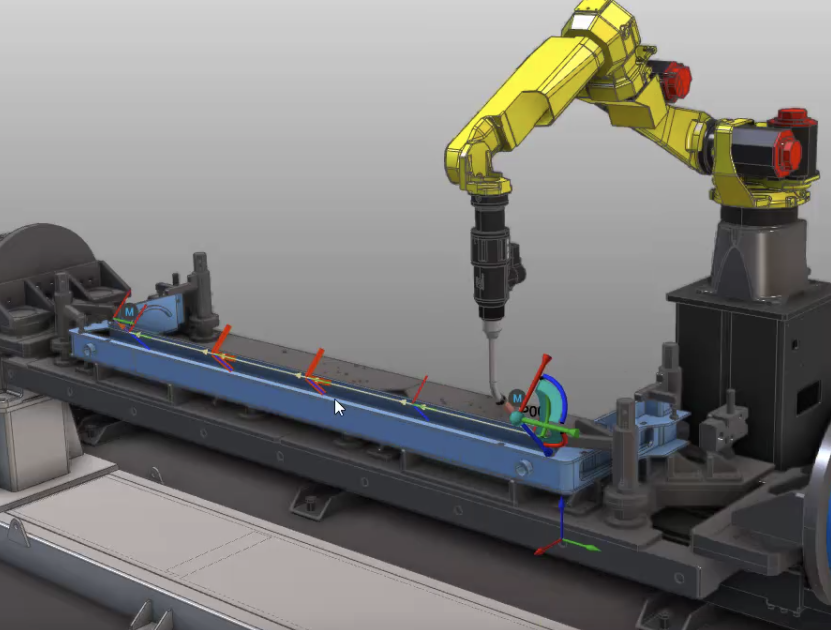
2.2修改轨道位置,使机器人能够到达刀具路径的接近位置。¶
可以见到机器人无法抵达加工位置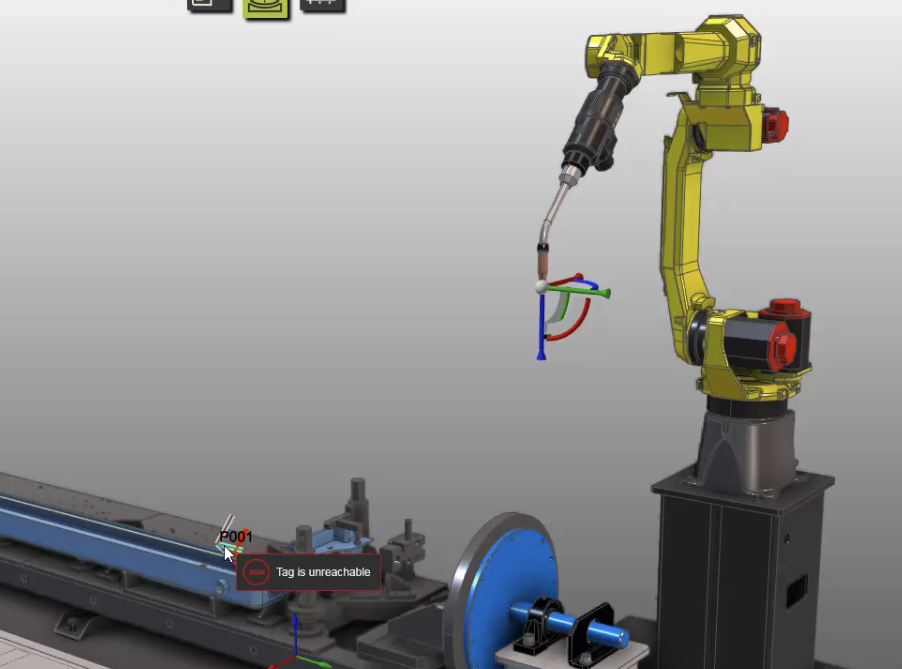
从左侧菜单来切换手工示教,左键点击机器人底座(变位机),拖拽变位机到正确位置。(即能看到机器人的工具头抵达待加工区域)
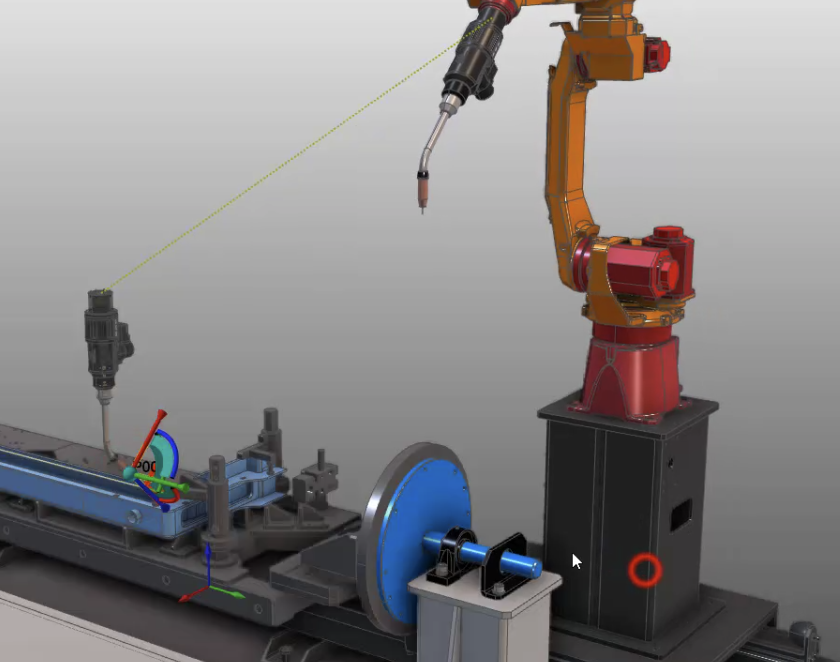
右键操作球,点击确认,将修改后的位置保存。
 2.3 使用示教仪表板将移动导轨,使机器人能够到达焊接路径的末端位置。¶
2.3 使用示教仪表板将移动导轨,使机器人能够到达焊接路径的末端位置。¶
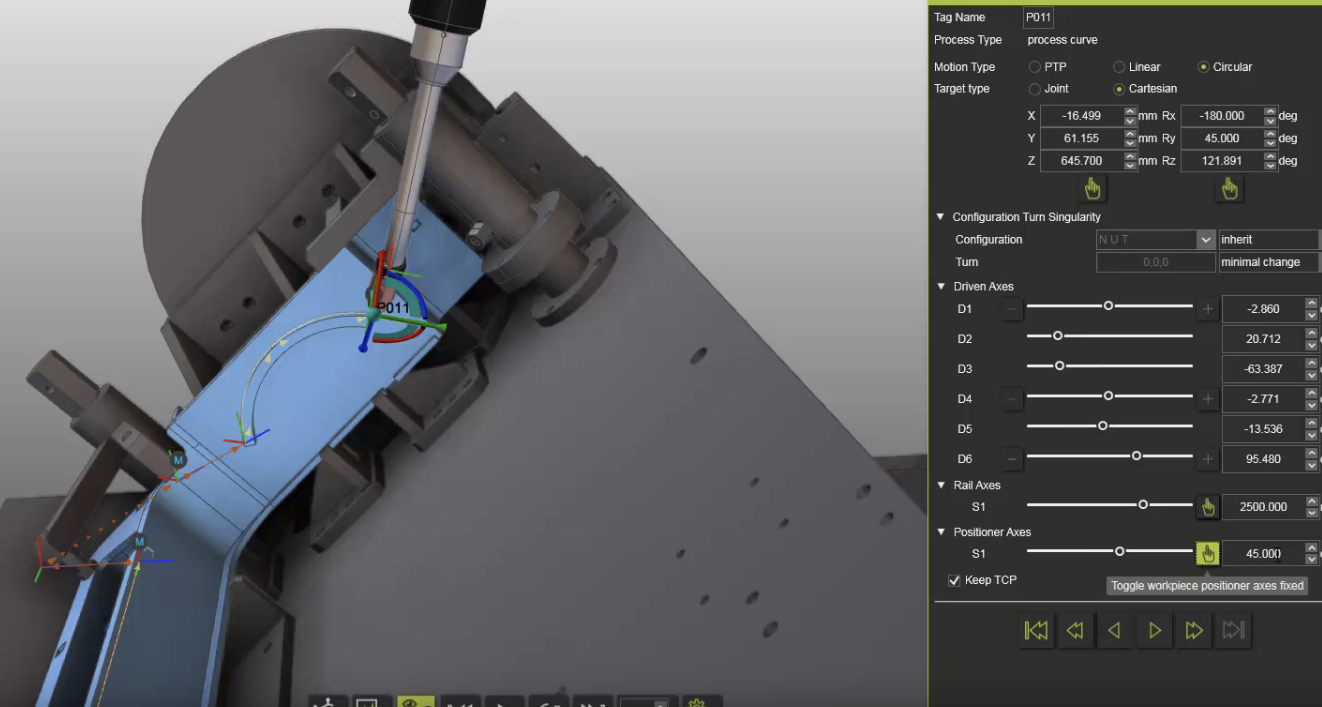
打开右侧示教面板,需要在左侧离线编程菜单中选择示教和事件才能打开

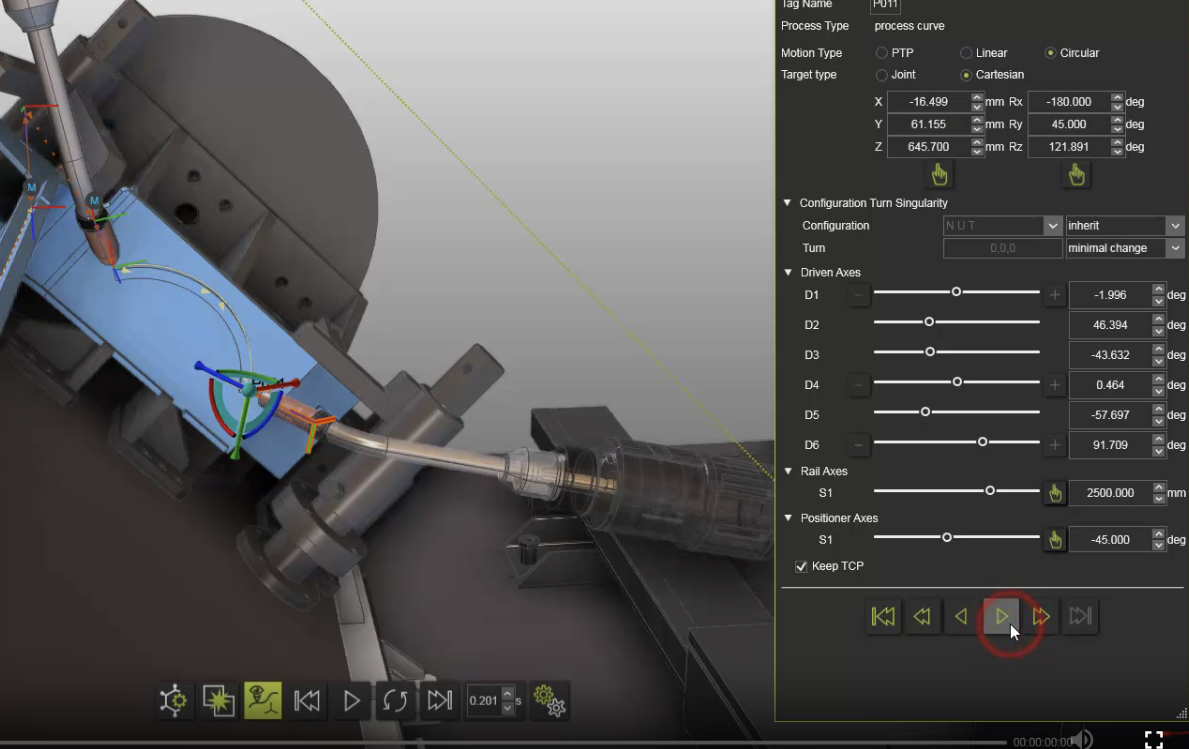
在示教面板通过下方左右按键切换到需要修改的操作点
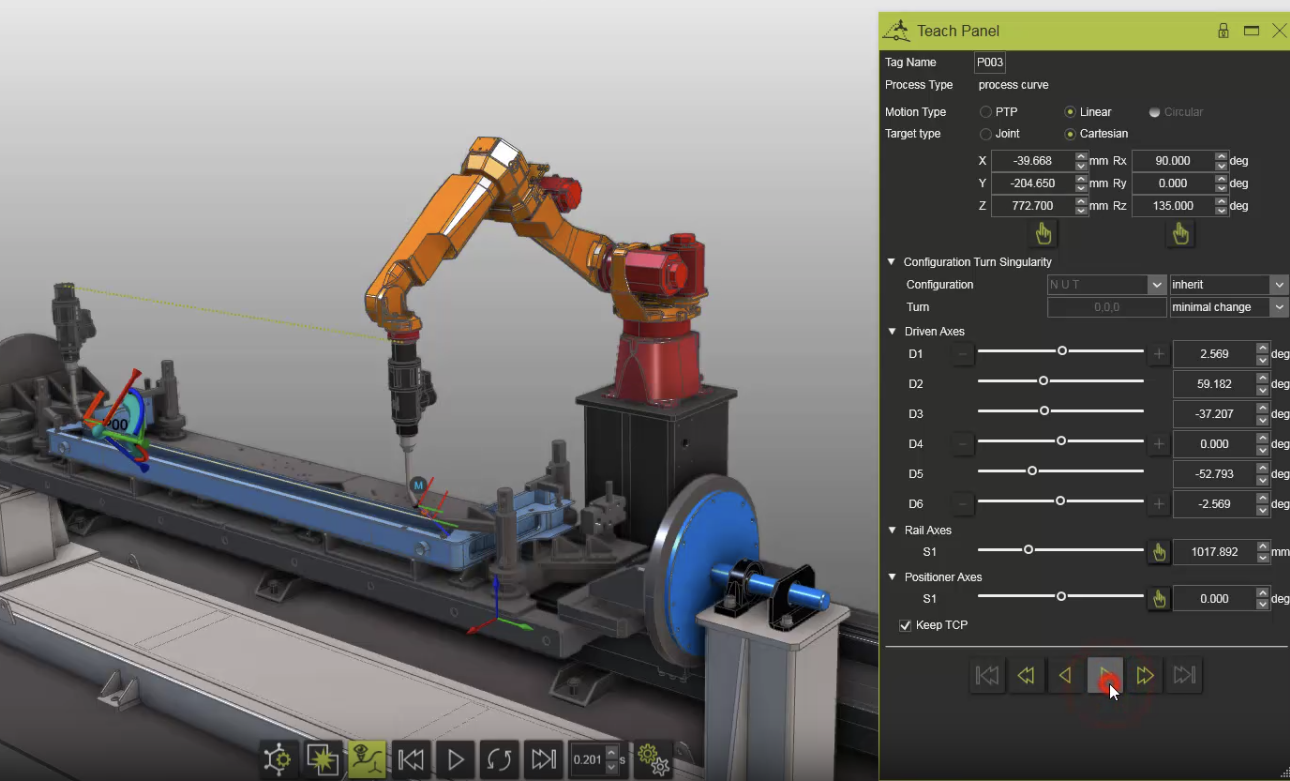
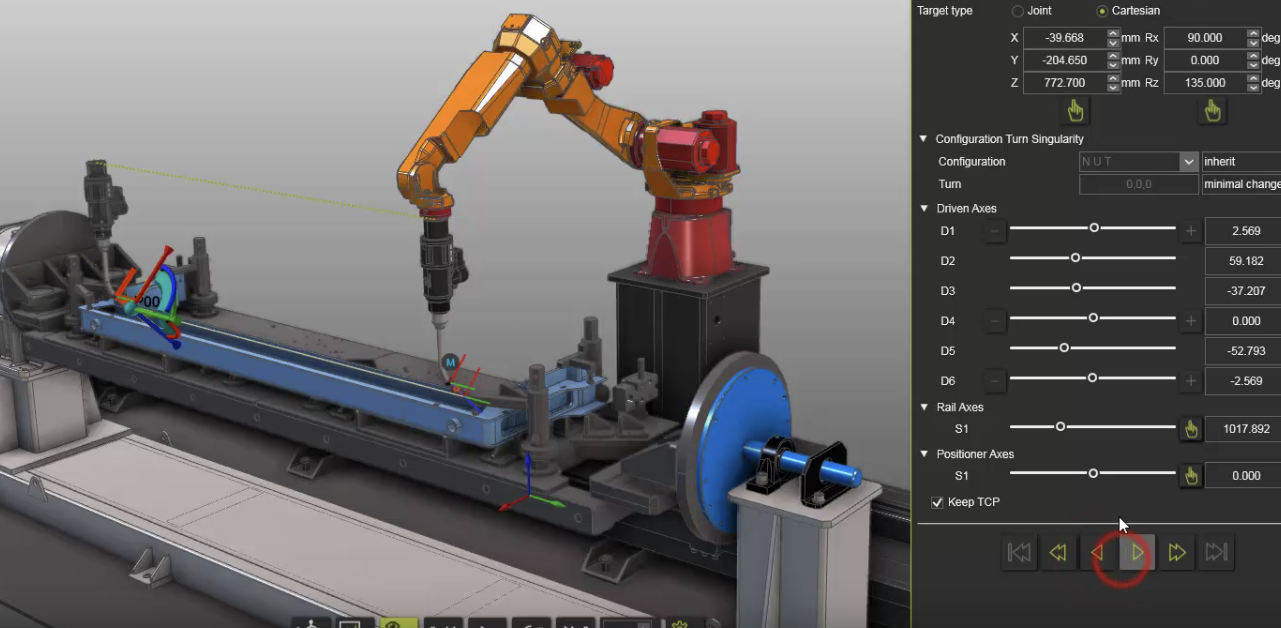
通过修改基座移动距离使机器人能够正确加工

运行并模拟程序,进行观察。
 2.4 修改沿焊接路径的刀具路径点位的数量,近似属性决定了路径点位的数量。¶
2.4 修改沿焊接路径的刀具路径点位的数量,近似属性决定了路径点位的数量。¶
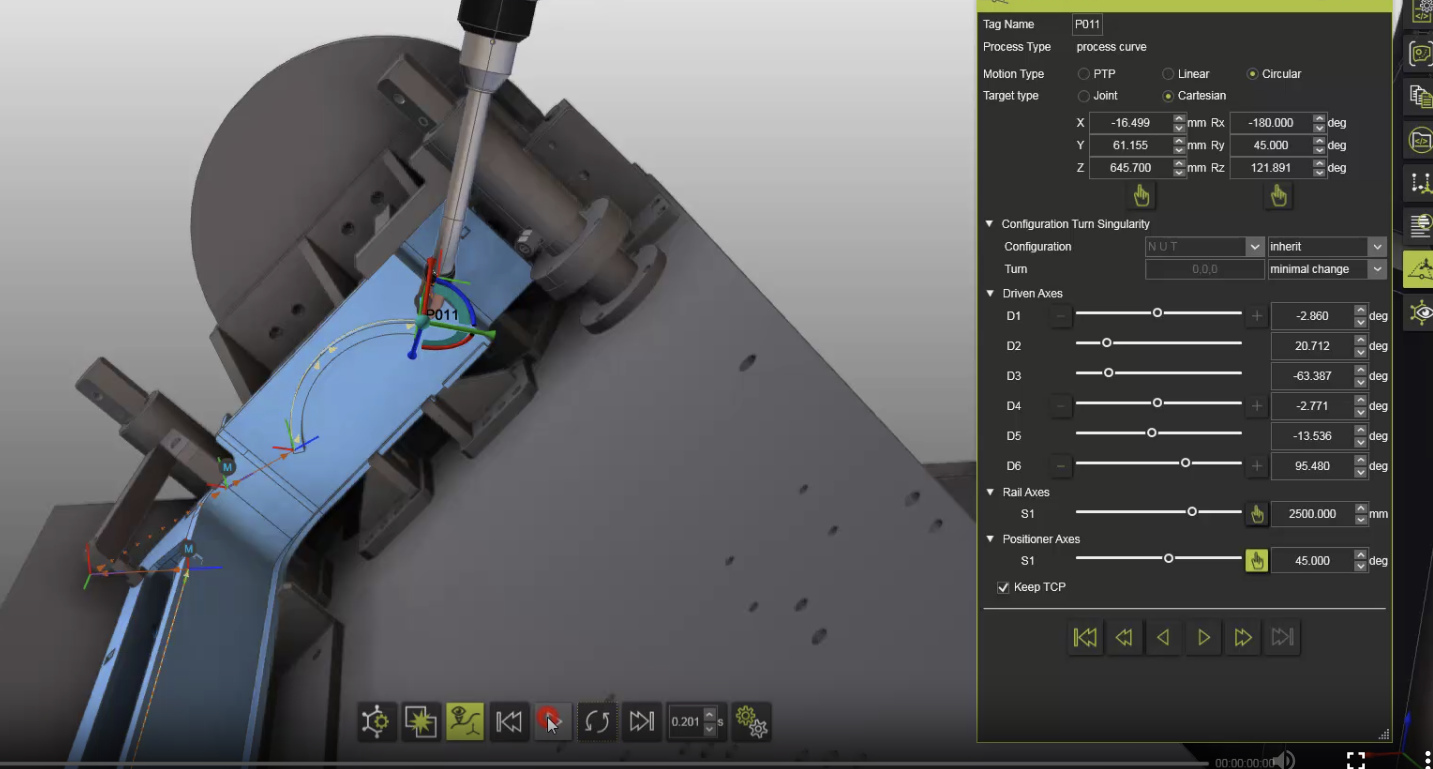
打开右侧程序控制板,在工具路径计算里找到第一项近似。
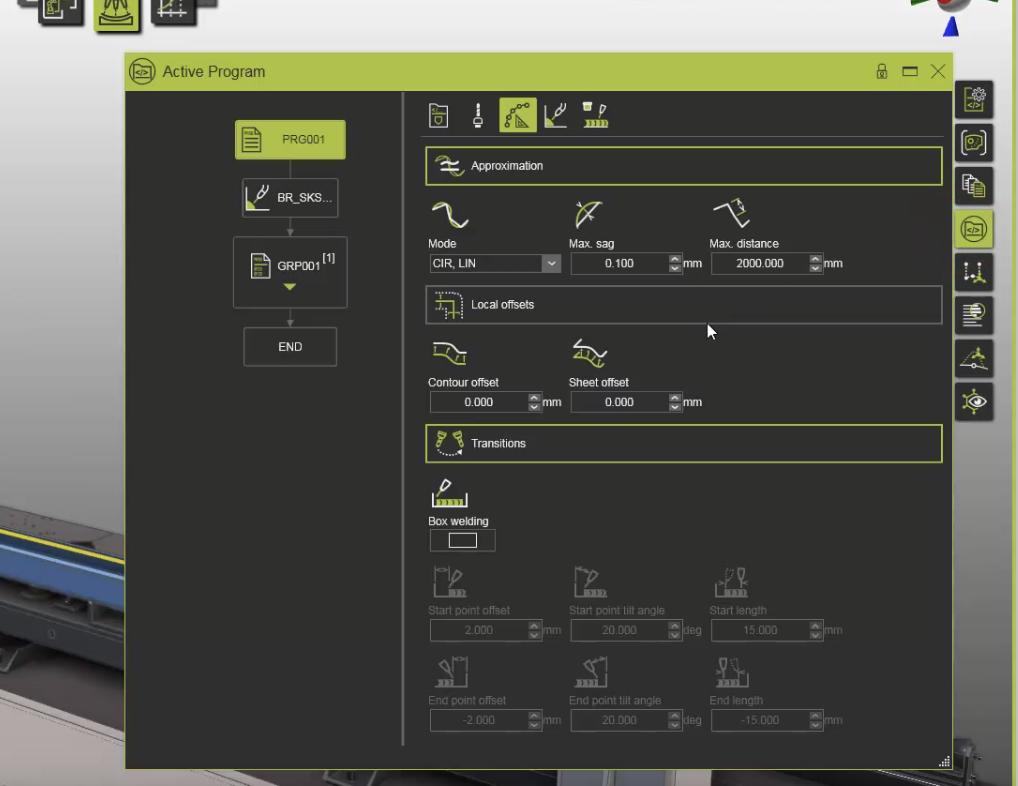
修改近似距离,从2000mm修改至500。注意左边加工路径的点位数量发生变化

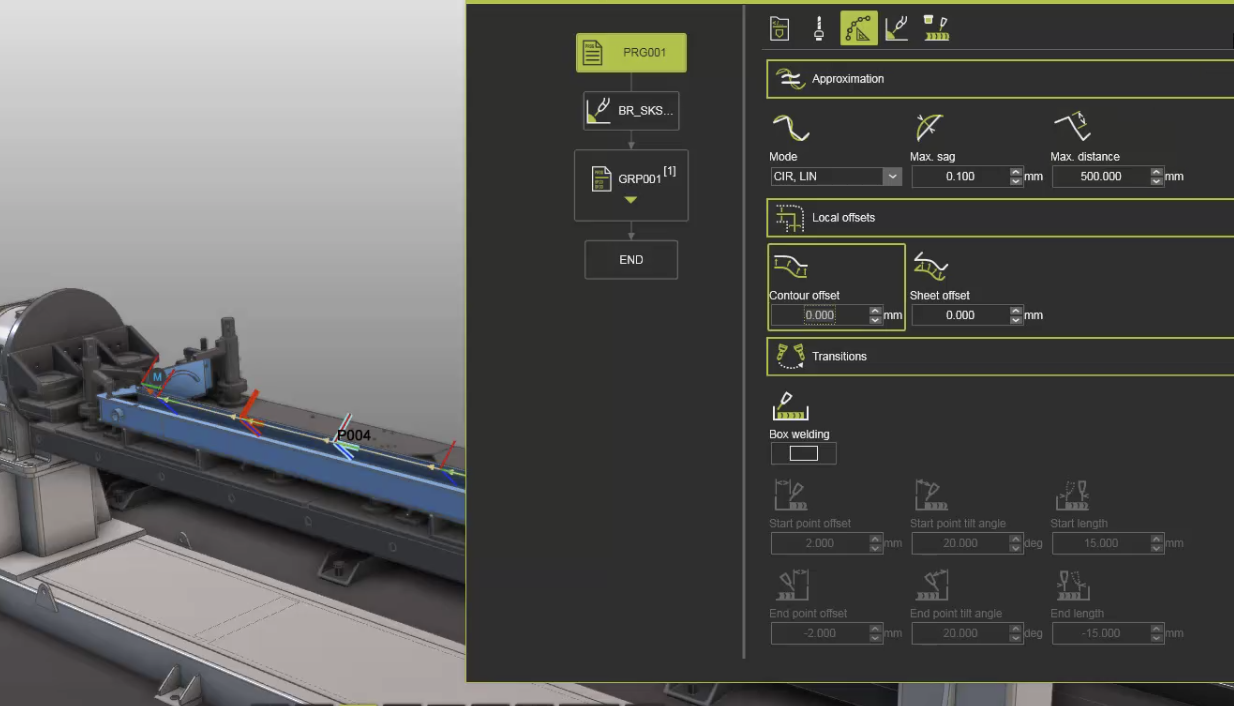
现在对更新后的点位进行修正即可完成本步骤。
2.5 添加沿路径的轨道位置插值,以生成轨道的平滑运动。¶
切换到示教模式,右键点击起始加工点位

在弹出的饼图菜单里选择路径插值(Path interpolation)

选择外部轴插值
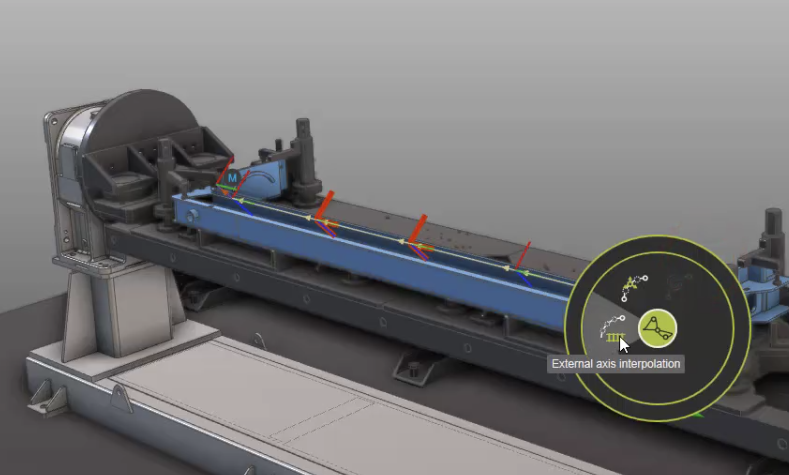
选择加速度变化固定优化
左键选择终点加工点位,即可完成插补。