飞思德软件导航页 Guide Page
FASTSUITE 数字化工厂解决方案
FASTSUITE EDITION 2 软件介绍
基础离线编程操作
弧焊离线编程 Arc Welding
机床激光切割离线编程 Laser Cutting
机器人激光切割离线编程 Laser Cutting
自动程序优化 Automatic program optimization
生产线架设
点焊离线编程 Spot Welding
喷涂离线编程 Spraying
飞思德进阶技巧
数字孪生标准工站
FASTSUITE 使用技巧 Tips & Tricks
附录
将引入第二个焊接机器人与第一个机器人合作。
准备好的工作单元(随本教程一起交付)被加载到项目中。焊接作业被分配并编程在两个机器人上,然后这些机器人同步。
确保经常保存更改。
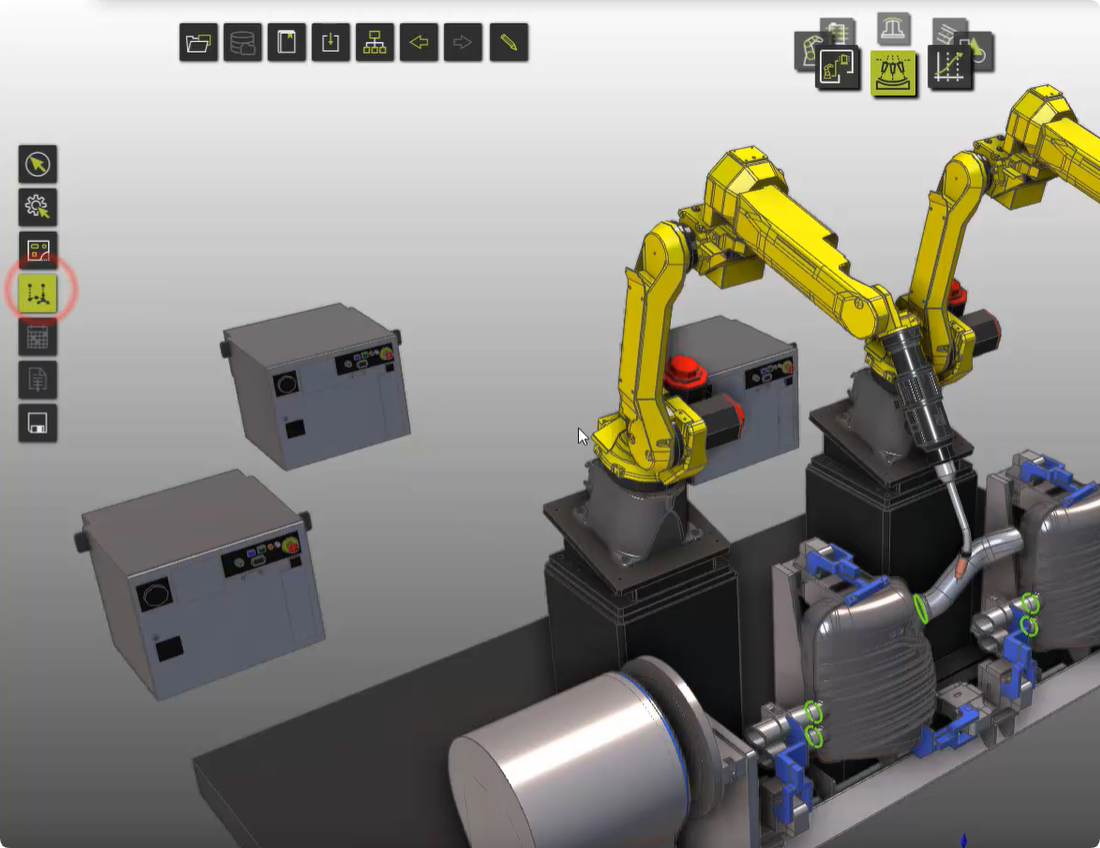
在多机合作之前,我们需要先对第一个机器人的行为进行编程
打开离线编程模块,点击工具路径编程按键。 选择应当由第一个机器人编程的焊道 右键焊道,调整起始点和终点,右键焊道出现饼图菜单,点击对此工艺图形进行编程。
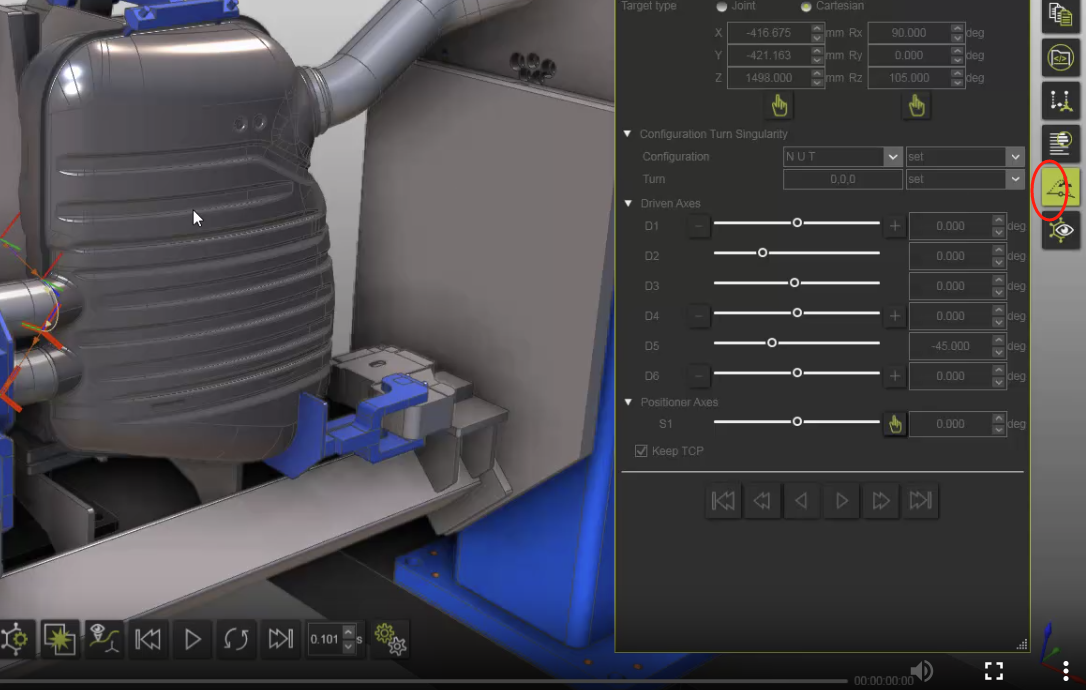
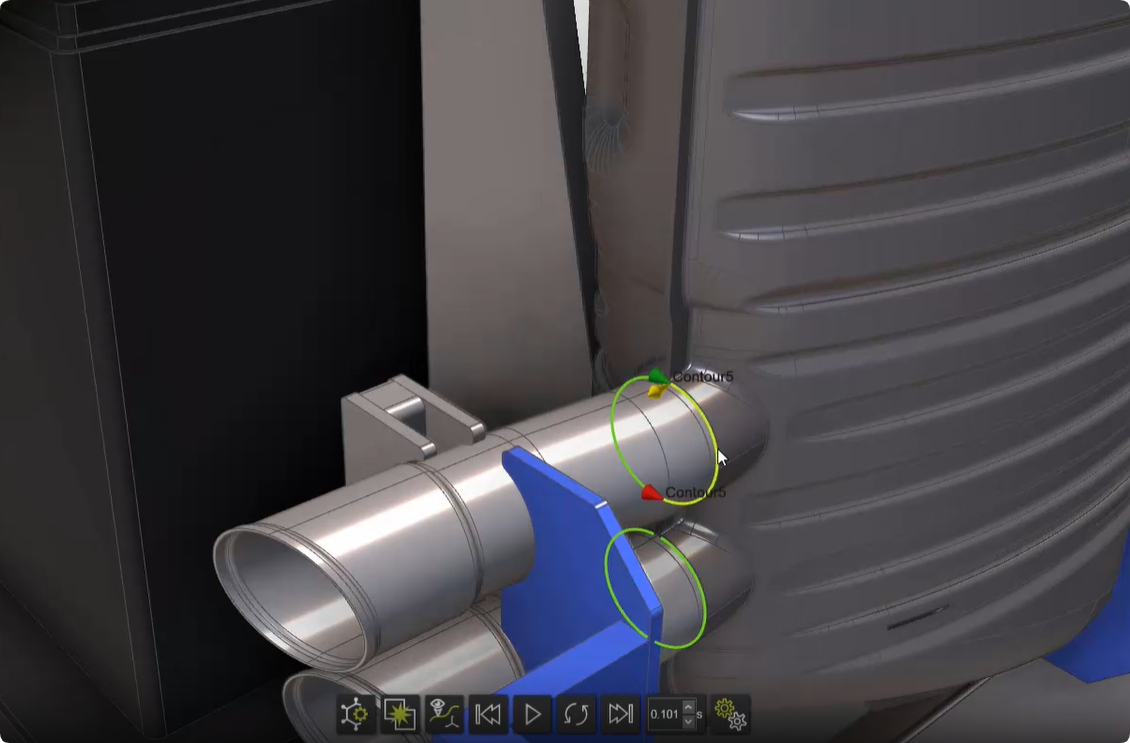
从左侧菜单栏选择事件与示教
从右侧菜单栏打开示教面板
选择工具路径上的点
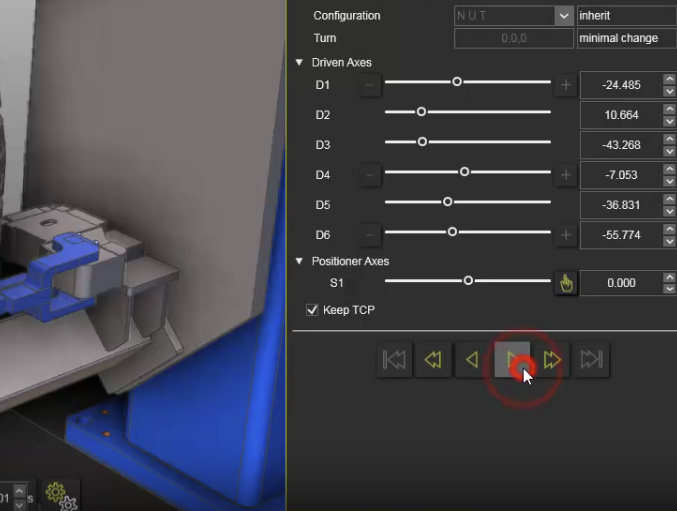
使用示教面板的播放栏前后挪动至需要修改的点位
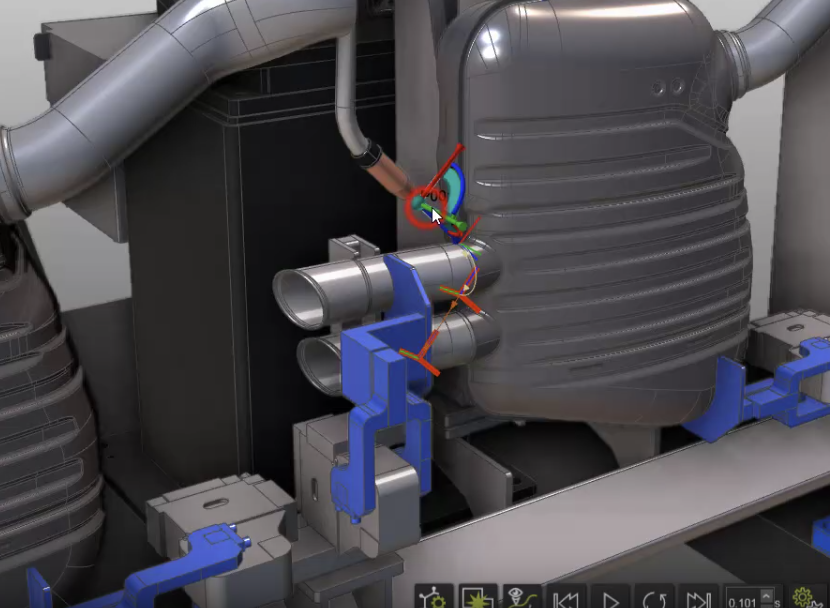
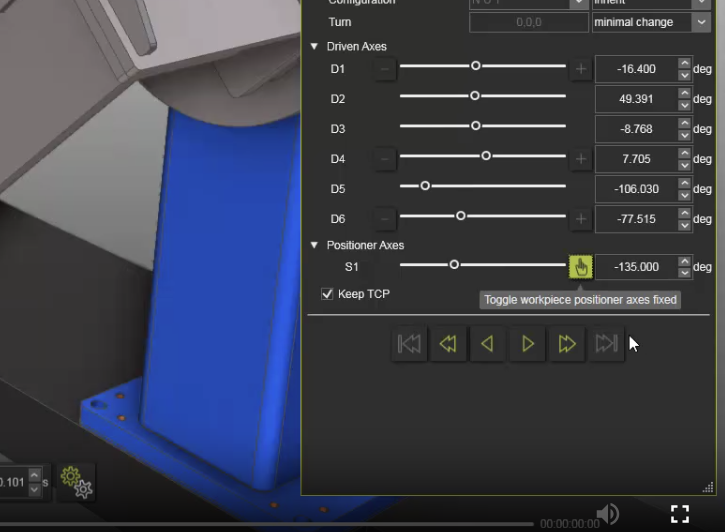
使用示教仪表板旋转工件变位机,使机器人到达焊接路径的P003位置。
 2.2 使用示教仪表板旋转工件变位机,使机器人到达焊接路径的P003位置。
2.2 使用示教仪表板旋转工件变位机,使机器人到达焊接路径的P003位置。
 2.3
2.3
 步骤
步骤 1.1 从文件夹打开workcell .cendoc文件。本文档包括本章中执行任务所需的完整项目设置。
1.1 从文件夹打开workcell .cendoc文件。本文档包括本章中执行任务所需的完整项目设置。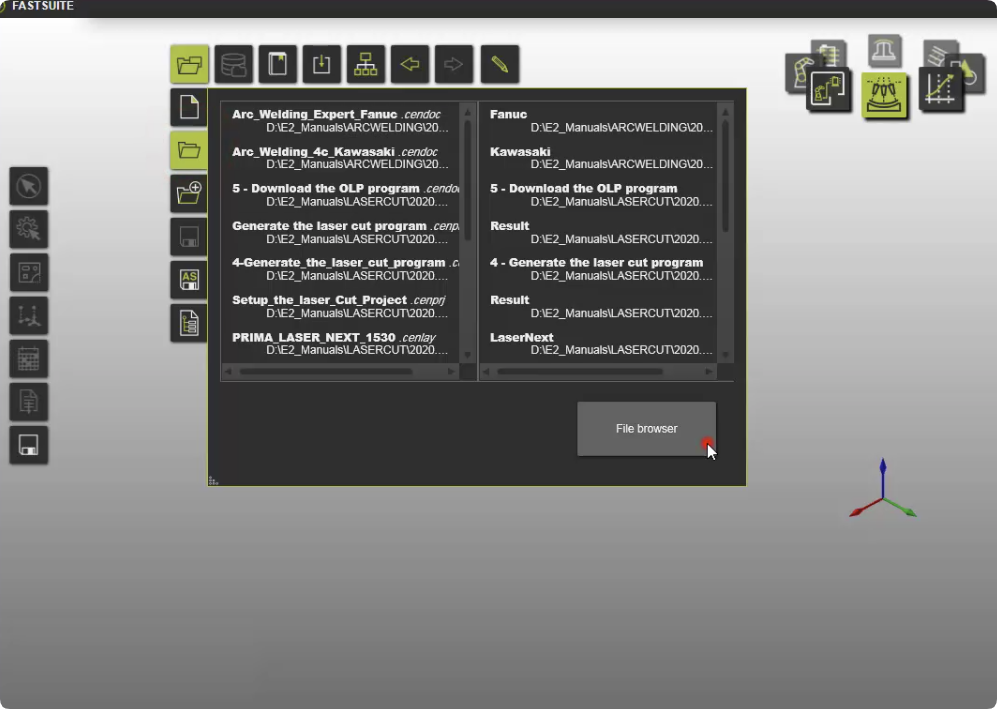
 选择应当由第一个机器人编程的焊道
选择应当由第一个机器人编程的焊道
 右键焊道,调整起始点和终点,右键焊道出现饼图菜单,点击对此工艺图形进行编程。
右键焊道,调整起始点和终点,右键焊道出现饼图菜单,点击对此工艺图形进行编程。
