飞思德软件导航页 Guide Page
FASTSUITE 数字化工厂解决方案
FASTSUITE EDITION 2 软件介绍
基础离线编程操作
弧焊离线编程 Arc Welding
机床激光切割离线编程 Laser Cutting
机器人激光切割离线编程 Laser Cutting
自动程序优化 Automatic program optimization
生产线架设
点焊离线编程 Spot Welding
喷涂离线编程 Spraying
飞思德进阶技巧
数字孪生标准工站
FASTSUITE 使用技巧 Tips & Tricks
附录
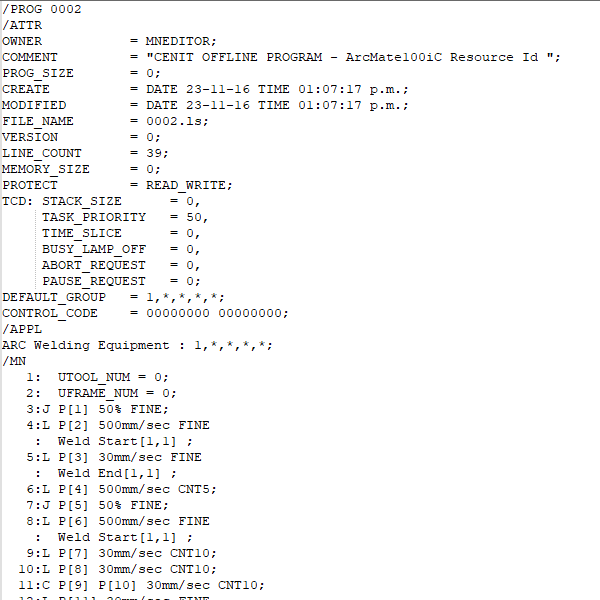
在这一最后一页中,我们将创建一个可以发送到真实机器人站执行的程序。
控制器工作台用于配置从OLP到机器代码的程序下载或转换,以及各种控制器设置。
切换到控制器构建器工作台。此工作台用于配置从OLP到机器代码的程序下载或转换,以及管理多个控制器设置。
打开控制器仪表板。在控制器中验证或设置后处理翻译器,此示例中为FANUS_RJ_BASIC_ARC_CNT.xml。后处理翻译器显然是特定于供应商的。
在同一个容器中,指定要下载程序的输出目录的路径。按Enter键或点击面板外的任意位置确认。设置输出目录。
切换到OLP工作台并打开程序仪表板。点击程序名称以更改它。
按下OLP下载按钮。这将创建特定于机器人的程序并将其存储在定义的位置。可以在那里打开以查看。