进行仿真和监控模拟¶
学习模拟程序或仅部分模拟,并监控机器人运动。
1. 模拟仿真¶
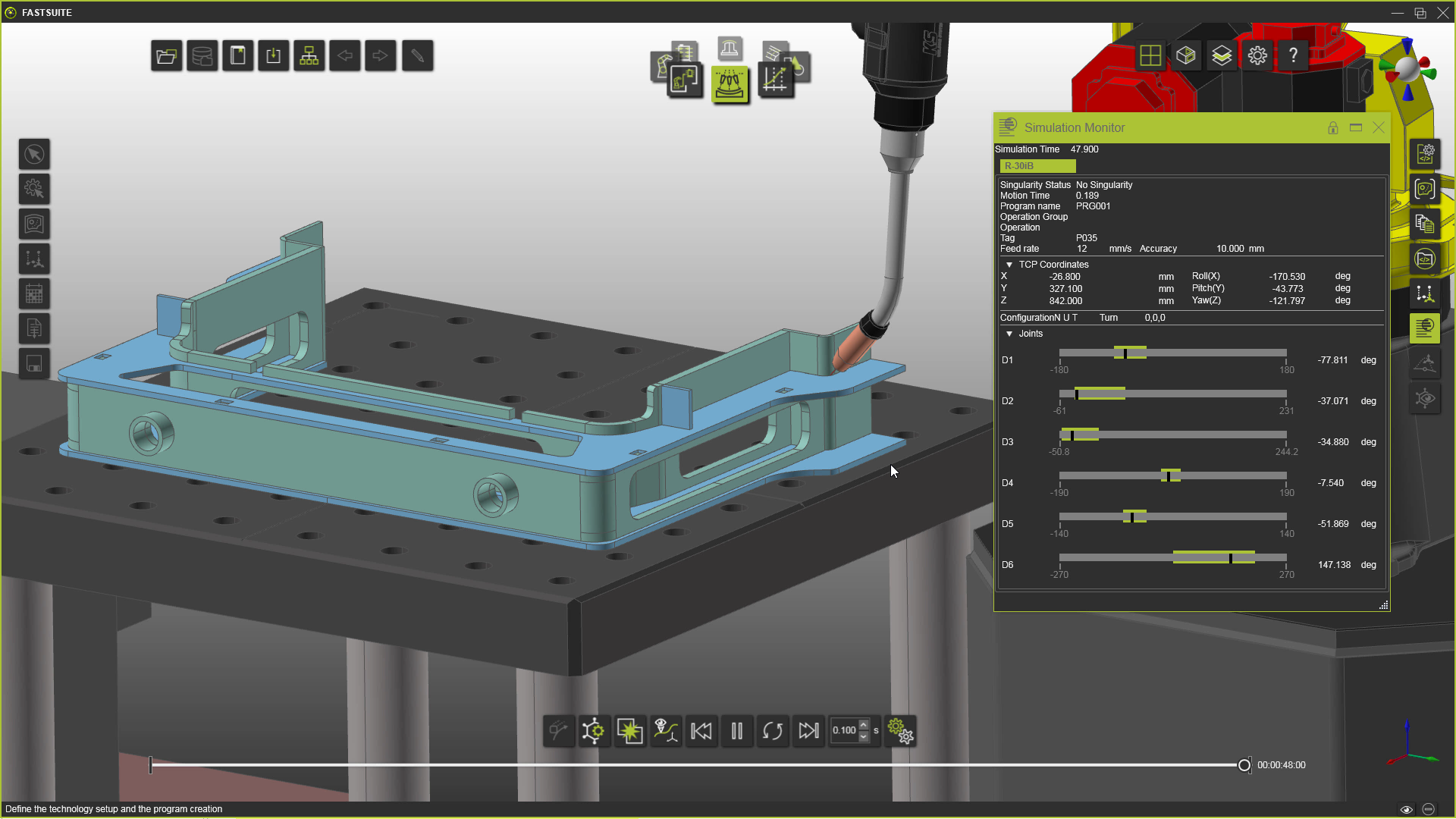
打开模拟监视器并锁定窗口。然后播放程序。模拟监视器窗口将显示各个机器人轴和焊枪中心点(TCP)的值。这有助于识别与轴限制相关的潜在问题。
在模拟执行时,模拟滑块球变为可用。拖动它以在程序中导航。当按下重置按钮时,模拟数据将丢失,滑块不再可用。
2. 跟踪路径¶
按下打开路径跟踪按钮并播放模拟。TCP的运动将被跟踪并显示在活动基准框架中。点击重置将删除跟踪。
3. 部分模拟¶
打开活动程序仪表板。右键单击一个操作组并选择播放部分模拟。模拟将仅为选定组或操作的焊接路径执行。
在3D空间中,右键单击一个焊接路径元素并选择播放部分模拟。然后点击第二个路径元素。模拟将仅播放两个元素之间的范围。
再次选择相同的焊接路径元素后,启动部分模拟,模拟将从该元素运行到程序结束。