动力学

参考指南 \ 组件与对象 动力骨架 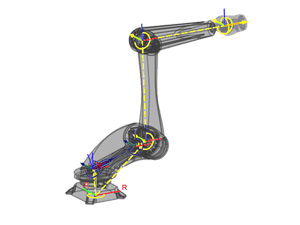
资源的动态能力由其动力骨架定义。这个动力骨架是一系列相互连接的关节,形成一个控制资源(部分)运动的链条。 关节是一个框架,一个坐标系统,具有若干预定义的运动属性。 属性 描述 坐标 关节的位置和方向。 轴 关节所参考的坐标系的轴。 类型 关节的类型: 
平移
旋转
父项
关节的父项关节或根框架,用于定义在动力骨架中的依赖关系。
限制
关节运动的最大和最小值。
最大速度
关节运动的最大速度。
最大加速/减速
关节运动的最大加速或减速。
连接未驱动关节
未驱动关节与驱动关节的刚性连接。
动力骨架的根由资源的根框架设置。
这个根框架与资源的固定部分相关,从该部分衍生出所有(相对的)运动。 在仿真过程中,动力骨架内所驱动关节的确切值由连接到资源的控制器设置。



