创建运动骨架
创建运动骨架

RB 工作台 \ 构建 
操纵器用于构建资源的运动骨架。其位置和方向用于创建骨架的关节。由于构建的是一系列运动关节,而不是随机的单个元素集合,所以要创建的关节总是附加在父对象上。这个对象可以是另一个关节或一个框架。运动链的第一个关节总是以根框架为父对象,无论关节本身是否位于根框架坐标。关节放置在框架的轴上,使用该轴作为平移或旋转的运动参考。操纵器轴将用于生成这个参考框和其关节。在这个轴上,需要调用饼状菜单来创建所需的关节类型。

重置操纵器 
对齐操纵器轴 
创建平移关节 
创建旋转关节 选择要创建的运动关节类型。
在该轴创建一个驱动的平移关节。或打开子菜单。 

无驱动
驱动
同步 
异步
在该轴创建一个驱动的旋转关节。或打开子菜单。 

无驱动
驱动
同步 
异步 执行命令后,关节已在操纵器的位置创建。 

平移 旋转 每次创建关节时,新关节将变为活动的并将成为随后创建的关节的父级。运动骨架的可视化设置为显示每个关节到其父参考的连接线。颜色可以在设置中选择。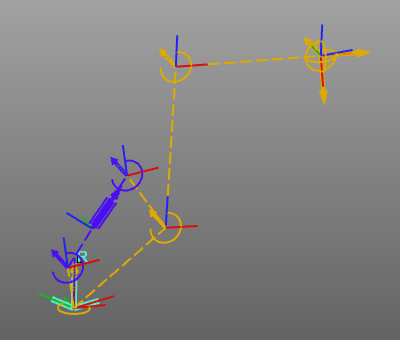

在设计机器人类型的资源或任何其他使用驱动(同步)关节和逆运动学的设备时,强烈建议在模拟前验证并确保资源属性和运动行为真实地代表实际物理设备。 更多资源参考信息 
运动学