未经驱动的运动学系统
未经驱动的运动学系统
通过未经驱动的关节子系统可以构建一个更为真实的资源运动学模拟。然而,这不是无限制的,仅限于FASTSUITE Edition 2支持的一系列可能的子系统,这些子系统是根据某些设计规则构建的。对于所有子系统,主要规则是在现有的运动学骨架内创建,而不是在两个运动学骨架之间,并且子系统的起点和终点必须是驱动关节。
系统 运动学定义 设计规则
Cardan 1. 旋转关节 2. 旋转关节
• 第一个关节垂直于第二个关节
• 关节轴必须相交
悬挂 TRR 1. 平移关节 2. 旋转关节 3. 旋转关节
• 所有旋转轴必须平行
• 平移轴必须与旋转轴正交
• 平移轴必须与一个轴平行,但不能与父关节的轴相同
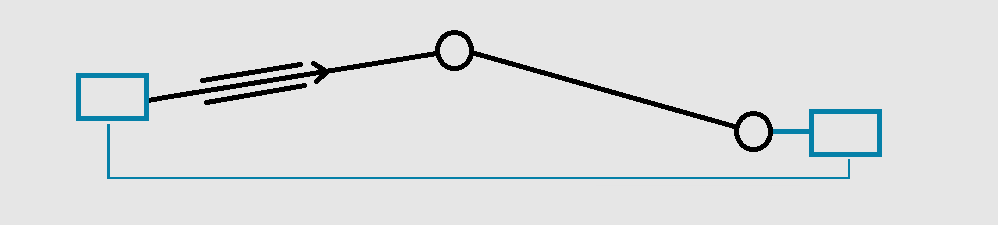
悬挂 RTR 1. 旋转关节 2. 平移关节 3. 旋转关节
• 所有旋转轴必须平行
• 平移轴必须与旋转轴正交
• 平移轴直接位于第一和第二旋转轴之间
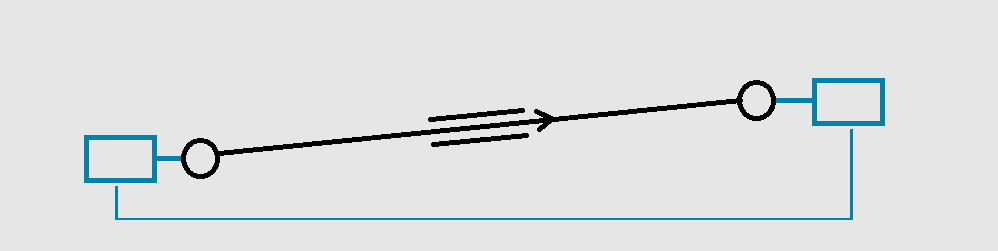
悬挂 RoTR 1. 旋转关节 2. 平移关节 3. 旋转关节
• 所有旋转轴必须平行
• 平移轴必须与旋转轴正交
• 平移轴不直接指向第一个旋转轴
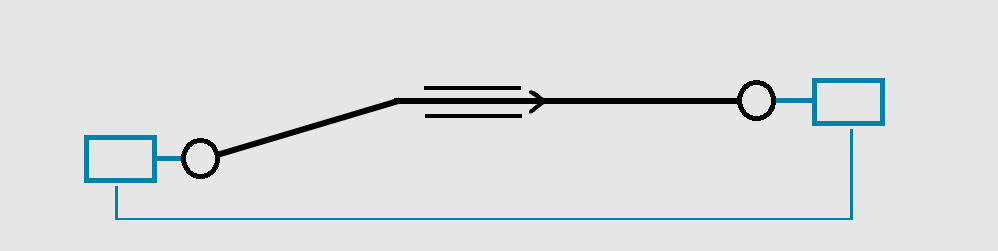
悬挂 RToR 1. 旋转关节 2. 平移关节 3. 旋转关节
• 所有旋转轴必须平行
• 平移轴必须与旋转轴正交
• 平移轴不直接指向第二个旋转轴
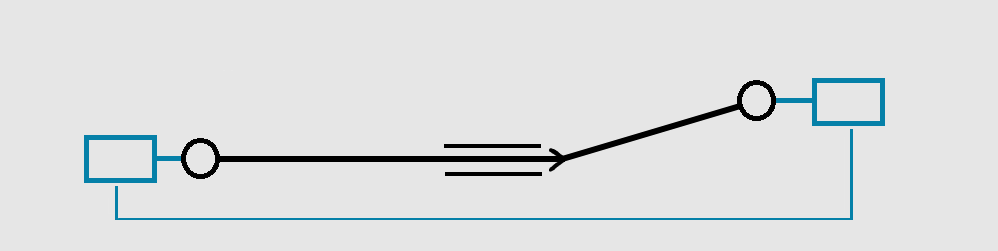
悬挂 RRT 1. 旋转关节 2. 旋转关节 3. 平移关节
• 所有旋转轴必须平行
• 平移轴必须与旋转轴正交
• 平移轴必须与一个轴平行,但不能与父关节的轴相同
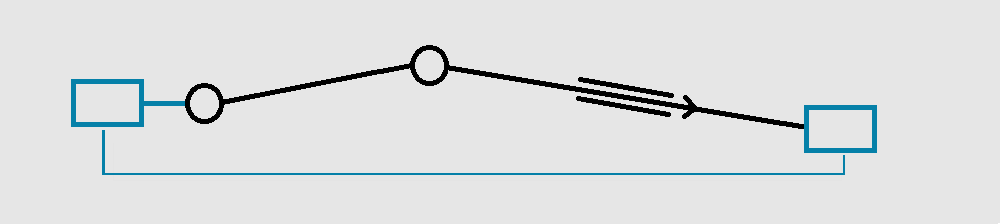
连杆齿轮 1. 旋转关节 2. 旋转关节 3. 旋转关节
• 所有三个旋转轴必须平行
• 所有三个关节位置必须不相同
• 所有三个关节不能在一条线上,既不在设计上,也不在运动时

更多运动学参考信息
