动作
执行器

参考指南 \ 组件和对象 \ 资源 动作
动作,或称为执行器,是在模拟运行时修改资源、控制器或工件的状态,或修改适配器之间连接状态的非物理对象。它会触发某些动作。动作可以在运动关节和适配器上定义。FASTSUITE Edition 2 使用以下定义来描述动作:
执行器在连接的资源之间构建一个机械(运动)连接。
执行器将电信号转化为机械运动,并配备传感器以检测该运动的不同位置。
在设计资源时,这些执行器和控制它们的信号由软件自动创建。要在模拟过程中使用执行器,资源必须连接到控制器,直接连接或通过机械连接到已连接控制器的资源。
它还区分了两种类型的执行器:
接口/适配器执行器
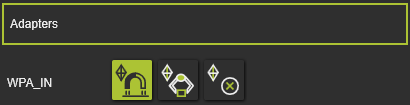
如上例所示,适配器执行器仅在资源的机械插口(父)适配器上定义。目前这仅限于生产和外围设备类的资源。在模拟过程中,可以设置适配器的状态,有三种模拟状态可用。
连接 在模拟过程中,插头适配器会连接到插口适配器,即组件可能会改变其相对位置(和方向)以与所插入的父组件相连接。

抓取 在模拟过程中,插头适配器保持其相对位置,即组件保持其相对位置(和方向)以与所插入的父组件相连接。

无 在模拟过程中,与插头适配器的连接保持不变,无法更改。
运动关节执行器

为了控制资源的特定运动或位置行为,其运动关节可以定义为执行器。如上图所示。
一个关节执行器有三种可能的行为条件,其中一种(在控制面板中选择的活动状态)在模拟过程中使用:
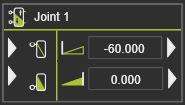
通过预定义的初始位置(至少需要两个初始位置)。
通过关节值。

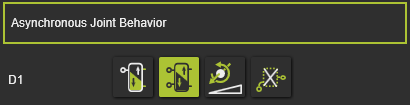
单稳
•一个输入端口 •两个传感器,与关节限制一起创建
关节会在信号未改变时朝指定方向移动。当信号改变时,关节会反向不受控制地移动。可通过图标命令反转单稳执行器的指定活动方向
双稳
•两个输入端口,用于在正负方向移动关节 •两个传感器,与关节限制一起创建
关节只在最大端口信号为真时向正方向移动。仅在最小端口信号为真时向反方向移动。当两个信号都为真或为假时,关节不会移动。
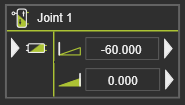
关节值
•一个输入端口,带有关节的目标值 •一个传感器,检测该值
关节向设定的值移动。
无

关节未受控制。
更多资源参考信息
资源分类
资源运动学
资源属性
用户定义的属性
资源设计规则
适配器
框架
传感器
物料流
行为模型
过程模拟行为