刀具路径

参考指南 \ 离线编程 

刀具路径
运动类型
刀具路径类型
刀具路径可视化
质量评估
抑制
刀具路径修改
刀具路径优化
更多刀具路径参考信息

刀具路径
刀具路径是描述制造资源工具中心点(TCP)运动的基本信息。它由一系列单独的、移动到预定(目标)位置的单一移动组成。确定移动的属性继承自前一个移动或通过命令或事件本地指定。这些路径移动中的每一个都由一个刀具路径元素(TPE)表示,定义如下:

标签:相对于OLP项目基准框架的位置
目标类型:笛卡尔或关节目标定义
运动类型:移动到位置的路径类型
刀具路径是这些路径移动计算的结果数据对象。它是编程、内部仿真和控制器中性下载文件时用于可视化和手动修改的数据基础。
运动类型
PTP
点到点运动,也称为同步PTP,是由工具路径的A点和B点的资源关节轴位置定义的。在TCP的旅行期间,所有资源关节轴从点A开始移动,并在点B停止移动,因此在时间上同时移动。因此,最慢的轴或行程最长的轴决定了TCP的运动时间。PTP运动不使用A点和B点之间工具路径上的任何中间控制点,因此TCP的实际运动是不可预测的,不一定遵循计算的刀具路径。
直线
直线运动的定义是TCP沿直线从A点到B点移动,前提是其速度(进给速度)保持恒定。每条路径(A点和B点之间)都必须重新生成为包含中间控制点的段,包括笛卡尔速度、加速度、刀具路径形状(直线、圆弧、多项式等)。因此,直线运动显著需要比PTP运动更多的计算资源。
圆弧
圆弧运动在系统上与直线运动相似。三个支撑点定义了一个平面,其中计算出圆弧。法向量将垂直于该平面。圆弧运动的限制是起点和终点不能相同:这样会导致无法生成圆弧。
刀具路径类型
刀具路径可以在三种类型(几何体)对象上生成:
基于点:刀具路径基于标签计算
基于轮廓:刀具路径在曲线对象上计算,考虑到分段错误、最大距离和强制支撑
基于表面:刀具路径计算为位于表面的连接平行轮廓集。
基于点
基于点的过程几何体在选择的每个过程几何点生成一个刀具路径操作位置。
基于轮廓
刀具路径生成时将近似轮廓过程几何体。近似方法和精度在编程默认值中定义。生成刀具路径时,在每个近似极限创建一个标记并连接路径方向线。
应用圆形近似时,在每个近似弧段中间创建一个额外的刀具路径元素。这个刀具路径元素称为通点,并被识别为虚线轴。
根据所选技术和程序设置,可能会生成额外的信息,例如接近和撤退位置以及事件标志。
基于表面
从导引曲线(交点或边界)开始,表面由一组轮廓表示,即与导引曲线平行的轨道。这些轨道然后连接建立一个连续的路径。
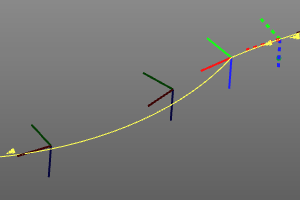
刀具路径可视化
计算后显示刀具路径。在显示过滤器中可以选择实际显示的信息。
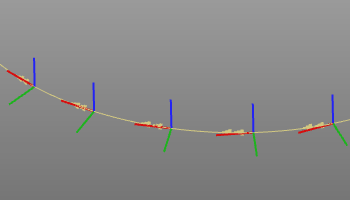
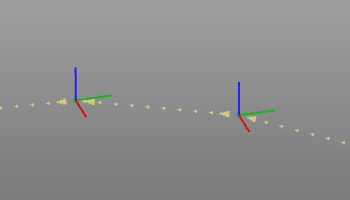
通过标签位置(由轴系统表示)和连接标签的路径可视化刀具路径。TPE的蓝轴表示法向方向,红轴表示切向方向。路径通过不同颜色显示处理中的和非处理中的部分,并通过不同符号指示运动类型。
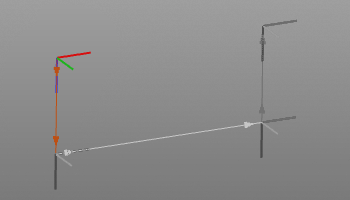
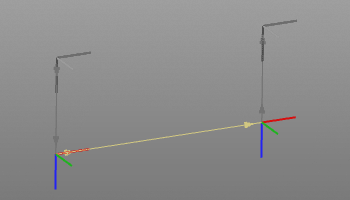
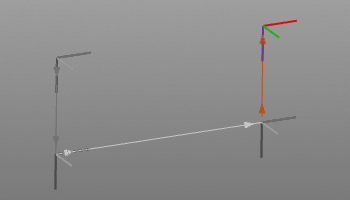
接近 路径 撤退
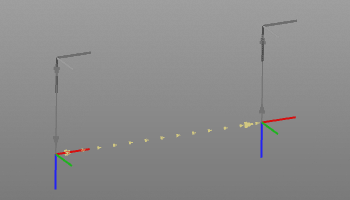
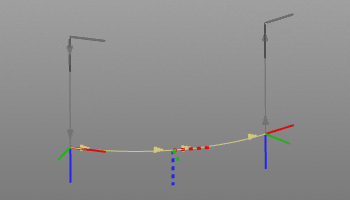
线性运动 PTP运动 圆弧运动
圆弧运动在圆弧中间有一个中点,称为通点。这是一个额外的刀具路径元素,也可以操作。
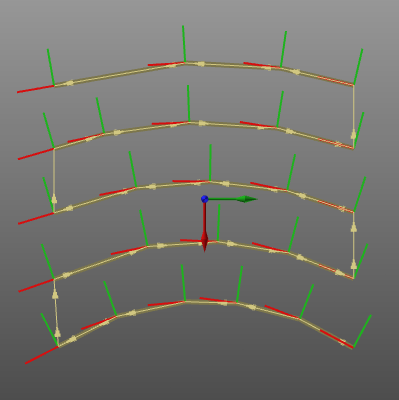
通常应用于表面的平行曲线刀具路径可视地分为平行轨道、轨道导入和导出及其连接。
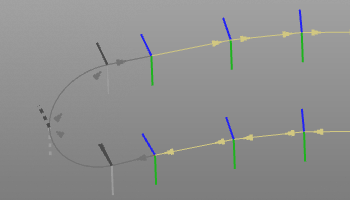
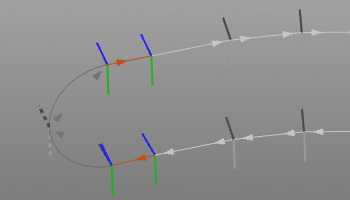
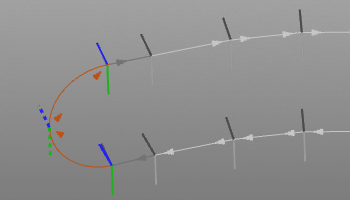
平行轨道 导入/导出 轨道连接
此外,还有许多不同的选项来显示刀具路径及其单个位置。大多数这些选项需要在显示过滤器中设置。
质量评估
创建和修改刀具路径时,会自动进行质量评估。评估根据几个预定义标准运行。评估结果显示在多个仪表盘和3D刀具路径上。

抑制
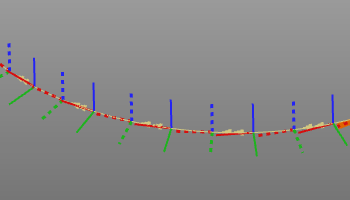
在刀具路径的创建过程中,每个单独的元素(TPE)都成为该路径的活动成员。然而,可以在模拟或下载时忽略这些元素,而不删除它们。这称为抑制该元素。
当抑制TPE时,其显示颜色变暗,刀具路径会自动重新计算。
刀具路径修改
对刀具路径的更改在许多情况下需要对该刀具路径进行完全重新计算。刀具路径(即程序)的重新计算可以设置为自动执行。在这种情况下,程序将在每次修改后重新计算。要收集更改然后执行更新,可以在设置中设置手动重新计算。在这种情况下,3D空间的左上角会出现一个重新计算命令按钮,以指示是否需要重新计算。


无需重新计算 需要重新计算
刀具路径优化

刀具路径质量评估
自动过程路径优化
自动操作连接生成
插值
奇点优化
自动切线绝对插值
过程定向
外部轴值的反向传播
更多刀具路径参考信息
点操作的刀具路径计算
轮廓操作的刀具路径计算
表面操作的刀具路径计算
侧向切线操作的刀具路径计算
非处理中的刀具路径定义
技术属性
手动教学