操作链接优化¶

参考指南 \ 离线编程 \ 加工路径 \ 加工路径优化 

操作链接生成
条件
属性
路径生成
链接路径状态
自动路径优化链接
更多加工路径优化参考信息 
操作链接生成
自动操作链接生成是一项主要目标是在两个操作之间创建一个运动路径,该路径在制造设备(工具、机器人等)与工件或其他设备之间不发生任何碰撞。进一步的目标,例如最小化循环时间等,可能作为次要要求包含在功能中。
该功能将生成比直接连接操作更复杂的路径。

该功能作用于现有的工具路径结构,具体表现在:

操作并调整接近和缩回位置,前提是这些位置与过程无关。
在操作链接路径本身内创建额外位置。
下图示意了将生成的解决方案。
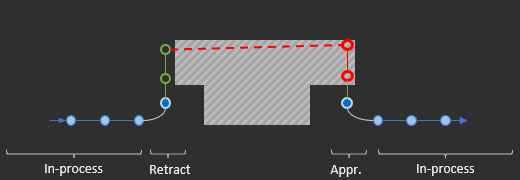
之前
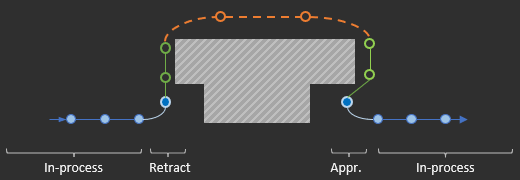
之后
条件
技术系统配置
每种技术都有不同的边界条件和要求。不同类型的机器人或机器,它们的配置和转动值(如适用)以及优选的运动(PTP、lin等)在计算适当且预期的链接路径时具有重要意义。考虑到这一点,将不会有基于工件几何形状的通用解决方案。对于每种技术和制造设置情况,系统计算其自己的特定解决方案。
链操作的依赖性
操作可以用各种可用的功能进行修改或优化。这意味着自动操作链接生成可能不会改变它所连接的操作。这意味着:
源操作最后一个过程点的坐标位置、机器人配置和转动值与目标操作的第一个过程点将保持不变。
因此,可能需要更改链接路径本身的配置和转动值(取决于运动类型的能力)。
外部轴
外部轴的值将包含在链接路径的计算中。源操作的最后一个过程点和目标操作的第一个过程点的轴值将保持不变。即使这些是模态的而没有明确指定,也会保留在那里应用的值。
手动修改
用该功能生成的工具路径位置可以手动编辑。
修改后的位置保持固定,因此在命令更新后不会重新计算。
可以在链接路径中插入其他位置。
属性
在活动程序仪表板的技术选项卡“操作链接”中,可以设置控制操作链接创建的参数。
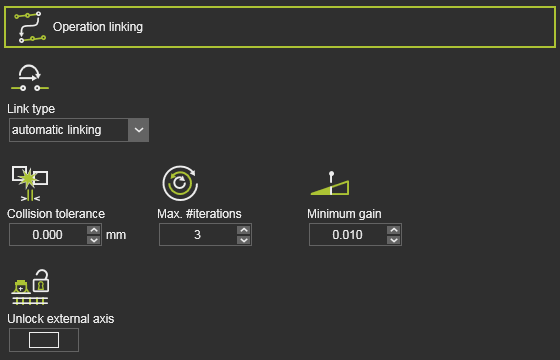
属性 描述 备注 链接类型 操作链接的类型。 要启用自动生成,必须将类型设置为自动链接。
碰撞容差 在生成链接路径时定义安全距离。
最大迭代次数 定义路径查找算法运行的最大迭代次数。
最小增益 定义在迭代之间质量度量值必须改进的最小值。否则,路径查找将结束。
解锁外部轴 使用外部轴值的整个范围来生成链接路径。 关:外部轴值只能在链接路径的起点和终点给定的间隔内更改。 开:外部轴值应在每个轴的整个范围内考虑(即解锁)。

在此处对属性所做的更改需要通过再次执行命令来重新生成链接路径。
路径生成
自动操作链接路径生成使用迭代步骤的方法来找到结果。执行时,将出现一个面板,指示过程的进展情况。

链接路径状态
自动生成的状态在工具路径监视仪表板中可见。
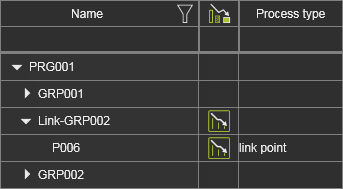
这里的列指示是否已经执行自动链接路径生成过程及其状态。

空:未生成自动链接路径。

已运行自动生成且仍然有效。

已运行自动生成,但已过期(即覆盖)由于其他(额外的)修改。
自动路径优化链接
更多加工路径优化参考信息
