资源作用者属性

资源构建器工作台

仪表板
接近传感器
光电开关
物料源
物料汇
适配器
异步关节行为
更多执行器参考信息

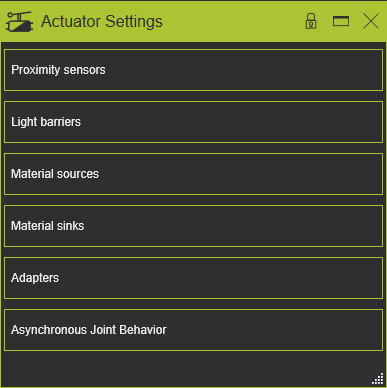
仪表板
执行器仪表板概述了资源中用于仿真和离线编程的可用执行器,如下例所示。
接近传感器
这个容器显示了资源上可用的接近传感器。
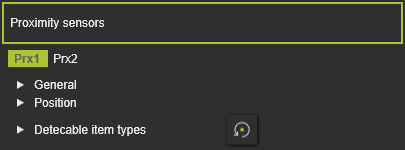
对于每个传感器,定义并在此处修改以下属性。
属性 描述 备注
名称 接近传感器的名称。 允许空白名称。端口类型 传感器的端口类型,即在检测时的开关行为。传感器支持两种类型:
常开 NO
常闭 NC检出直径 传感器检测区域的直径。检出距离 传感器检测区域的高度。

X, Y, Z 传感器的 X, Y 和 Z 坐标。 坐标设置为组件的全局坐标系。 滚转(X), 俯仰(Y), 偏航(Z) 传感器的滚转、俯仰和偏航方向。方向角设置为组件的全局坐标系。

定义传感器可以检测到的组件类别。通过对应的类别图标进行选择。复位命令将定义切换回基本设置。
工件类别。
资源类别。
选择类别图标会设置该类别的所有组件。
人类类别。
光电开关
这个容器显示了资源上可用的光电开关。
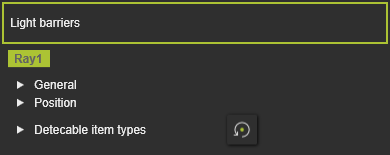
对于每个传感器,定义并在此处修改以下属性。
属性 描述 备注
名称 光电开关的名称。 允许空白名称。端口类型 传感器的端口类型,即在检测时的开关行为。传感器支持两种类型:
常开 NO
常闭 NC 检出直径 传感器检测区域的直径。检出距离 传感器检测区域的高度。
X, Y, Z 传感器的 X, Y 和 Z 坐标。 坐标设置为组件的全局坐标系。 滚转(X), 俯仰(Y), 偏航(Z) 传感器的滚转、俯仰和偏航方向。方向角设置为组件的全局坐标系。
定义传感器可以检测到的组件类别。通过对应的类别图标进行选择。复位命令将定义切换回基本设置。
工件类别。
资源类别。
选择类别图标会设置该类别的所有组件。
人类类别。
物料源
这个容器显示了用于物料流仿真的可用物料源。
对于每个物料源,定义并在此处修改以下属性。
属性 描述 备注
名称 物料源的名称。 允许空白名称。
X, Y, Z 物料源的 X, Y 和 Z 坐标。 坐标设置为组件的全局坐标系。 滚转(X), 俯仰(Y), 偏航(Z) 物料源的滚转、俯仰和偏航方向。方向角设置为组件的全局坐标系。
物料汇
这个容器显示了用于物料流仿真的可用物料汇。
对于每个物料汇,定义并在此处修改以下属性。
属性 描述 备注
名称 物料汇的名称。 允许空白名称。宽度 (X), 深度 (Y), 高度 (Z) 物料汇激活盒的尺寸。 盒子的尺寸是从物料汇的原点定义的。
X, Y, Z 物料汇的 X, Y 和 Z 坐标。 坐标设置为组件的全局坐标系。 滚转(X), 俯仰(Y), 偏航(Z) 物料汇的滚转、俯仰和偏航方向。方向角设置为组件的全局坐标系。
适配器
这个容器显示了资源适配器的状态。
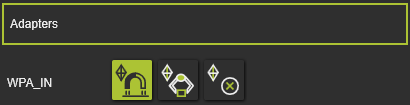
这里列出了机械插座(母)适配器。对于每个适配器,通过按下相应的符号,可以设置与插头适配器的机械连接行为。

快照 在仿真期间,插头适配器将快照到插座适配器,即组件可能会更改其相对于父组件的位置(和方向),以与插座连接的位置。 
抓取 在仿真期间,插头适配器保持相对于插座适配器的位置,即组件保持其相对于连接的父组件的位置(和方向)。 
无 在仿真期间,与插头适配器的连接保持不变,不能更改。
异步关节行为
这个容器显示了资源异步关节及其在仿真期间的控制方式。
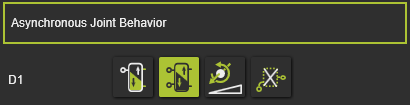
资源的所有异步关节都列在这里。通过按下相应的符号,可以设置每个关节的行为控制。

单稳态 关节在专用方向上移动,只要相应的输入信号不改变。当该信号改变时,关节将不受控制地向相反方向移动。专用的、主动的单稳态执行器方向可以用图标命令反转

双稳态 关节仅在最大端口的信号为真时向正方向移动。仅在信号最小端口为真时向相反方向移动。当两个信号都为真或为假时,关节不移动。
关节值 关节根据设置的值移动。
无 关节不受控制。
更多执行器参考信息
