焊接轮廓过程几何

WP工作台 \ 过程几何
OLP工作台 \ 过程几何 

命令
轮廓搜索方法
轮廓投影方法
向投影轮廓添加边缘
工具方向
焊接过程几何
编辑
OLP中的路径自动生成
电弧焊缝检测
更多过程几何参考信息 
](pfunc_pg_weldingcontour.html “返回顶部”)
命令
使用焊接轮廓过程几何命令,可以为电弧或激光焊接创建专用的轮廓过程几何。它是一个常规轮廓,通过其他搜索方法生成,并包含一些特定于焊接的功能。
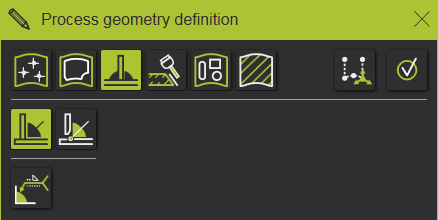
过程几何定义包括两种不同的方法。

轮廓搜索 选择曲线元素时搜索轮廓。

轮廓投影 将表面边界投影到另一个表面上。
在搜索方法下会显示其他可用选项。

电弧焊缝 打开焊缝驾驶舱以设置焊缝过程信息,专为电弧和激光焊接技术设计。
](pfunc_pg_weldingcontour.html “返回顶部”)
轮廓搜索方法
此方法仅适用于由多个实体组成的工件。不同的多实体工件的组件无法使用此方法处理。
轮廓的选择支持单个元素的选择或轮廓搜索以找到最大可能的解决方案,即直到发生箱体条件。调用3D视图中的饼状菜单可以在这些模式之间切换。


激活操纵器

创建新操作组 (仅OLP)

切换显示/隐藏工作空间

打开过程几何定义

切换过程几何显示
选择轮廓的元素自动会得到该单独元素或完整轮廓,无需用户进一步操作。
开始
在激活搜索模式下的结果
此方法有一个选项。

搜索所有边缘
当搜索模式关闭时,过程几何会自动在选择的(单个)轮廓元素上创建。当搜索模式激活时,轮廓选择开始搜索以找到完整的可能焊接圆角解决方案。当其他实体导致某种干扰或碰撞时,轮廓搜索会自动停止。
关闭
打开
](pfunc_pg_weldingcontour.html “返回顶部”)
轮廓投影方法
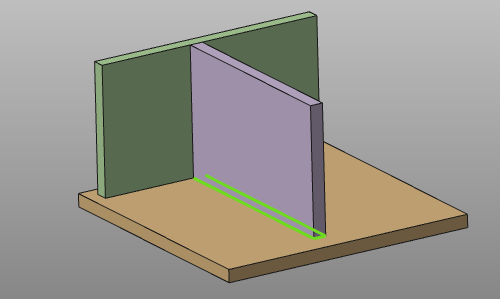
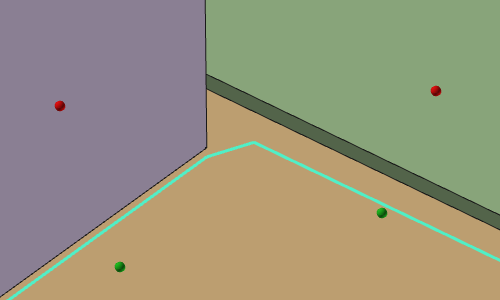
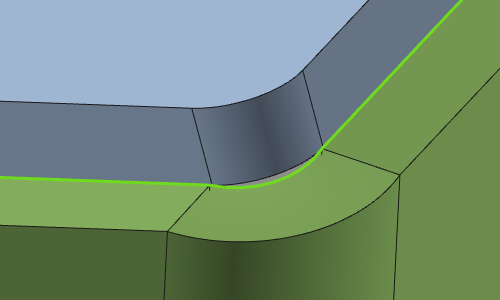
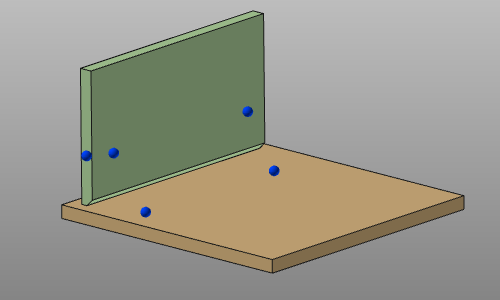
此方法适用于待焊接部件没有公共边缘生成过程几何的情况。这通常出现在不同的实体未完全对齐时,工件由多个实体或组件构成时,或者焊接部件的形状没有明显的焊接轮廓时,如下例中所示。
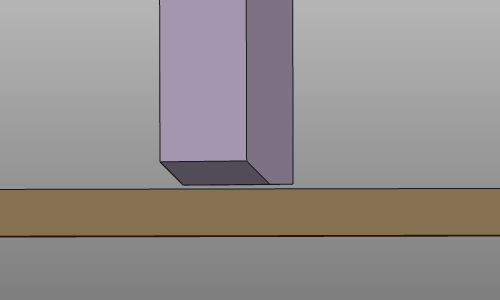
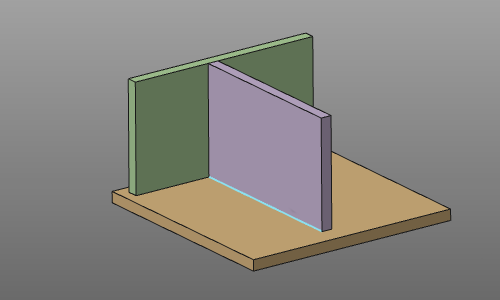
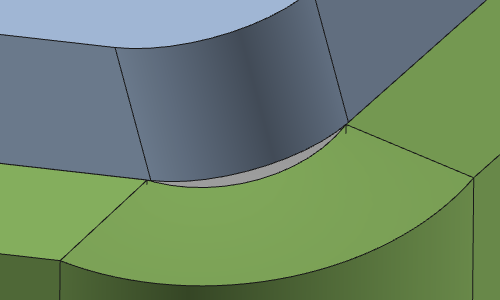
此方法的原理是将(最近的)表面边界边缘投影到另一表面上以生成焊接轮廓。
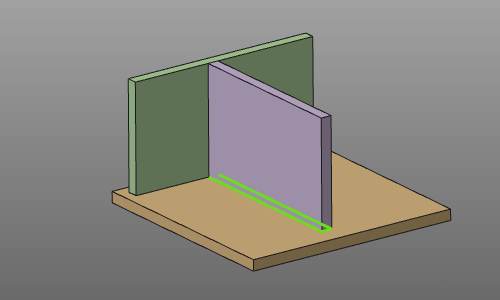
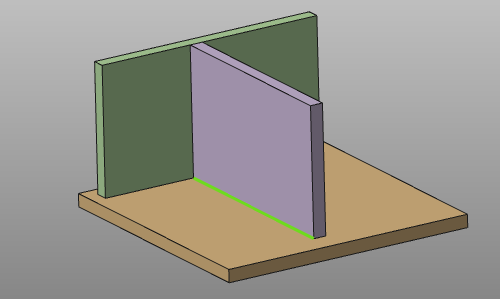
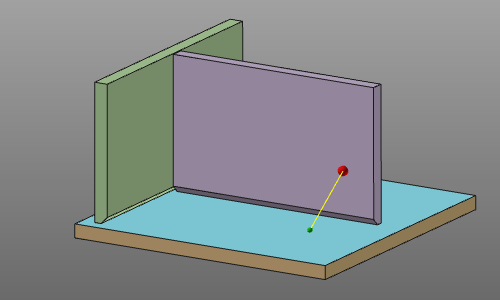
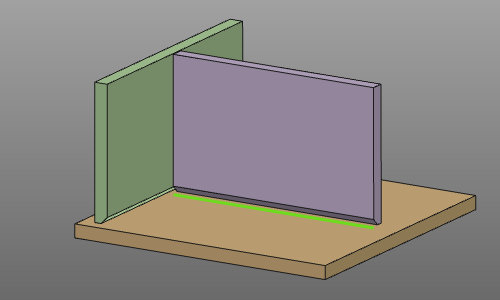
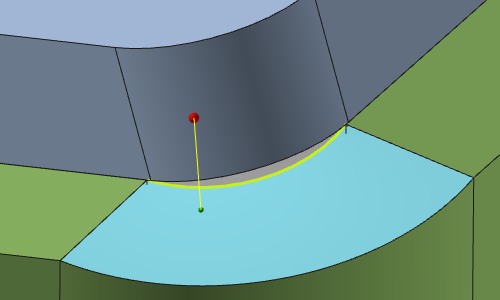
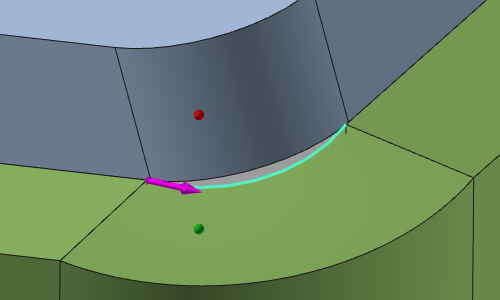
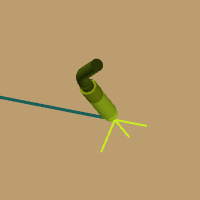
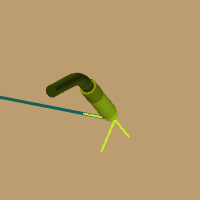
当命令启动时,鼠标指针处会出现一个小球。通常,首先需要将指针拖动到包含构建过程几何的轮廓的初始表面上。选择该表面,但保持鼠标按钮按下,选择的表面将以红球标记。保持鼠标按钮按下,将指针拖动到要投影轮廓的表面上。会出现拖动光束。松开鼠标按钮在该表面上留下一个绿球作为指示;已构建一对,并且显示结果投影轮廓。确认过程几何定义面板中的
键或饼状菜单中的确认命令将生成过程几何。
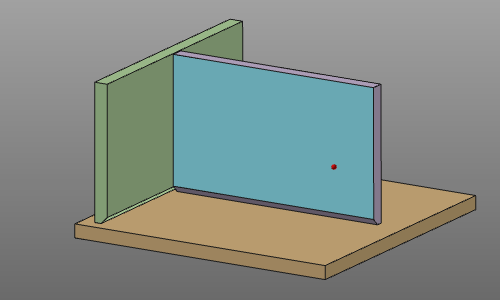
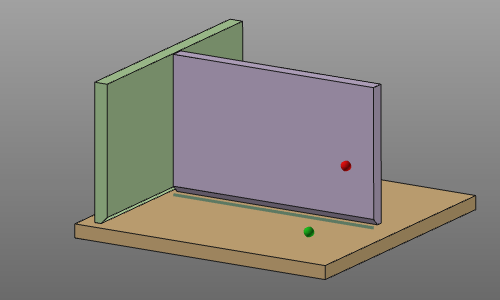
选择初始表面
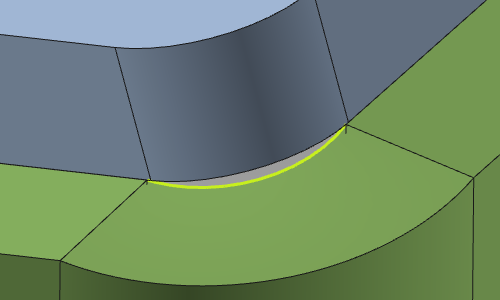
拖动到接收表面
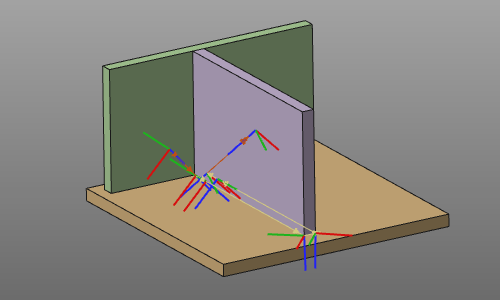
松开生成结果
生成过程几何
在将轮廓投影到接收表面时,该方法将搜索最大可能的解决方案。如示例中所示,与工件其他部分的互锁情况决定最终结果。
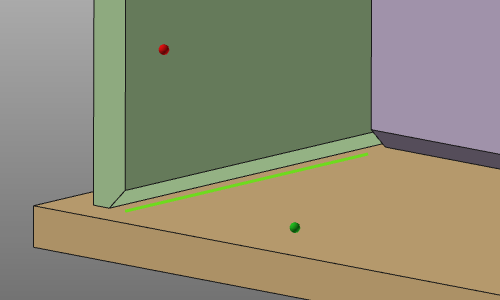
选择初始表面时,该元素的位置确定结果轮廓的方向,后来在该过程中几何编程时,这一方向将是初始方向。品红色箭头表示方向。
点击箭头将反转方向。

当选择两个部分的顺序未生成投影轮廓时,系统将自动尝试通过另一方向找到解决方案,即将第二表面的最近边界投影到第一个表面上。因此,选择两个表面的顺序没有区别。
在生成过程几何的确认前,可以重复该顺序以构建连续的多轮廓解决方案。使用撤销命令可以再次删除最后创建的投影轮廓部分。
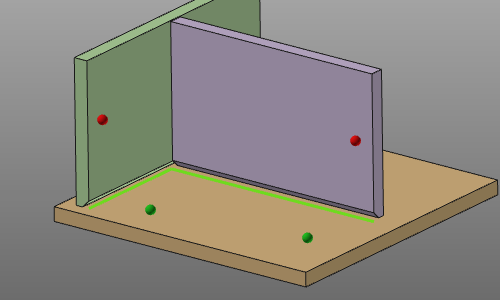
在多轮廓解决方案中出现的间隙将自动通过线性段闭合。
此方法有一个选项。

箱体焊接分析
激活后,系统将分析是否在焊接轮廓的起始或结束处遇到箱体情况。在这种情况下,箱体焊接属性将添加到过程几何中。
](pfunc_pg_weldingcontour.html “返回顶部”)
向投影轮廓添加边缘
工件的原始CAD数据的质量可能是导致未找到投影轮廓解决方案的原因。在这种情况下,解决方案是首先选择轮廓元素然后重复选择和拖动操作。轮廓用于生成过程几何,表面用于计算部件之间的焊接角度。
无解情况
选择轮廓
选择和拖动
结果
此方法可以与标准选择和拖动方法结合使用,以构建所需的完整焊接轮廓。
](pfunc_pg_weldingcontour.html “返回顶部”)
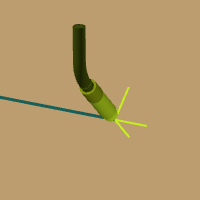
工具方向
在OLP工作台中工作并打开工具表示显示过滤器时,可以使用键盘上的箭头键动态修改工具旋转定义。
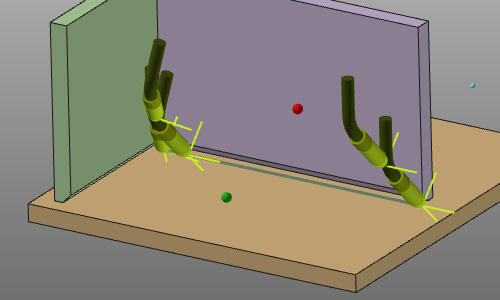


左或右键
顺时针或逆时针旋转工具方向90度。


上或下键
顺时针或逆时针旋转工具方向180度。
](pfunc_pg_weldingcontour.html “返回顶部”)
焊接过程几何
生成的过程几何具有一些附加属性,这些属性在编程路径时适用。这些属性显示在过程几何面板的表格中,可以进行修改。
轮廓搜索方法会将箱体焊接属性添加到过程几何中。

轮廓投影方法会将箱体焊接和工具角度属性添加到过程几何中。

结合电弧焊缝定义,显示这些焊缝属性。

](pfunc_pg_weldingcontour.html “返回顶部”)
编辑
目前,现有的焊角焊接过程几何无法在轮廓修改的上下文中进行修改。当然,过程几何对象可以被删除。
其离线编程属性可以在过程几何面板中修改。
](pfunc_pg_weldingcontour.html “返回顶部”)
OLP中路径自动生成
过程几何的创建也在OLP工作台中启用。这是为了方便,不必在工作件准备和OLP工作台之间不断切换。
在OLP工作台中创建焊角焊接过程几何时,不仅计算过程几何。在同一操作中,在没有任何用户进一步操作的情况下立即生成路径。路径根据当前应用技术的编程默认值计算,并考虑其特定属性。这些属性将覆盖编程默认值。
](pfunc_pg_weldingcontour.html “返回顶部”)
电弧焊缝检测
在定义焊接轮廓时,可以包括用于检测和校准焊缝的触点定义。这些触点通过在表面上选择来添加。鼠标选择位置会被测量为触点的坐标。使用撤销命令可以再次删除最后创建的触点。

触觉传感
](pfunc_pg_weldingcontour.html “返回顶部”)
更多过程几何参考信息

过程几何