电弧焊 - 触碰检测
焊缝校准 - 触碰感测

OLP工作台 \ 编程默认设置
OLP工作台 \ 活动程序
WP工作台 \ 过程几何 

触碰感测功能
编程默认设置
触点指示
修改触碰定义
更多参考信息 
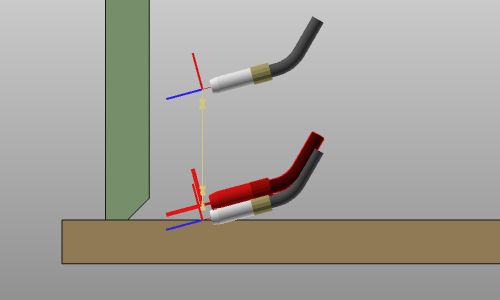
触碰感测功能
触碰感测,或通过触点指示的触碰感测,是一种不通过普通命令按钮启动的功能。它结合了焊接部件上的触碰操作条件及其校准位置的定义。操作条件需要在OLP编程中设置。触碰位置的设置可以集成在(焊接)轮廓过程几何的定义和创建中。
编程默认设置
在OLP工作台的编程默认设置仪表盘中,技术选项卡Technology base包括焊缝校准方法的基本选择。
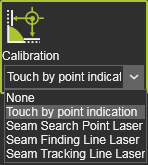
技术选项卡触碰感测将显示计算完整触碰操作循环的可用属性。
触点指示
在创建过程几何时,可以定义触点。然而,这种方法目前只适用于通过投影搜索焊接轮廓的方法。在定义此焊接轮廓的过程中,随时可以在任何焊接部件上选择任意数量的点。每个位置通过在焊接部件表面上点击鼠标确定。这些选定的位置用蓝色球标示,如下示例所示。
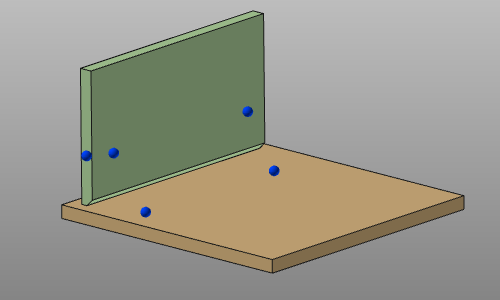
使用撤销命令,可以再次删除最后创建的触点。触碰位置的信息与正在创建的过程几何一起存储。位置信息显示在过程几何仪表盘上。

修改触碰定义
目前只能在手动编程路径时修改触碰检测点的位置。在选择过程几何时,与过程几何创建时定义的触点将显示在3D空间中。它们现在可以被选中和拖动到焊接部件上的任何其他位置。
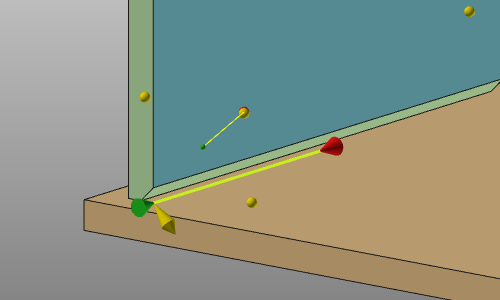
在此阶段,还可以添加新的触碰位置并删除现有位置。只需在焊接部件上选择一个位置来定义新的触点,或点击现有的黄色球以删除该位置。这适用于包含预定义触碰位置和不包含任何预定义触碰的过程几何。 一旦在包含触碰位置的过程几何上计算了路径,可以修改所有其他触碰参数。
对于每个检测方向,创建一个操作循环。使用OLP工作台中的活动程序仪表盘,可以修改每个触碰操作的属性。
更多参考信息

