电弧焊缝校准
电弧焊缝校准

参考指南 \ 技术包 \ 电弧焊 
缝校准 在电弧焊中,焊缝校准的检测和测量通常通过各种方法进行,由不同的机器人制造商和系统集成商提供。 电弧焊技术包包含许多这些方法,具有一套标准的通用参数以及制造商特定的扩展。 以下校准方法可用: 
用焊丝触碰感应 通过焊枪焊丝与工件之间的触碰(即碰撞)来确定工件。 在焊接过程开始之前进行焊缝校准。 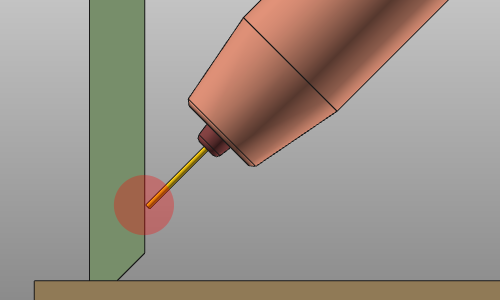
用喷嘴触碰感应 通过焊枪喷嘴与工件之间的触碰(即碰撞)来确定工件。 在焊接过程开始之前进行焊缝校准。 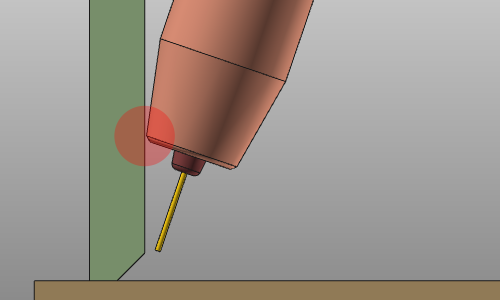

点激光焊缝搜索 通过测量工件位置的激光来确定工件。 在焊接过程开始之前进行工件位置校准。 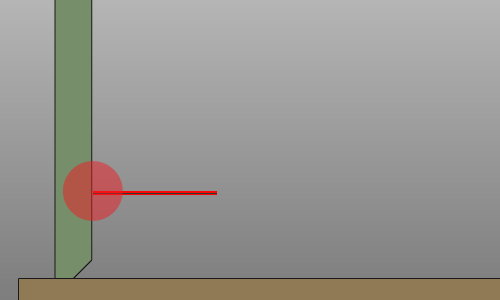

激光焊缝查找 通过2D/3D线激光扫描焊缝的起始和结束位置来确定工件。 在焊接过程开始之前进行焊缝校准。 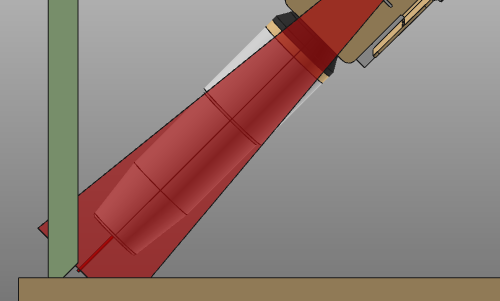
![]()
激光焊缝跟踪 通过在焊接过程中使用线激光连续测量工件位置来确定工件。 ![]()