电弧焊接

参考指南 \ 技术包 

电弧焊接操作
焊接周期
工具角度
工具对准
通过触摸感应进行缝线检测
编程属性
程序事件
更多信息 
电弧焊接操作:
为电弧焊接编写工具路径基本上会生成一个(焊接)周期,即一个操作,包含三个阶段:
接近(非处理阶段)
焊接过程(处理阶段)
收缩(非处理阶段) 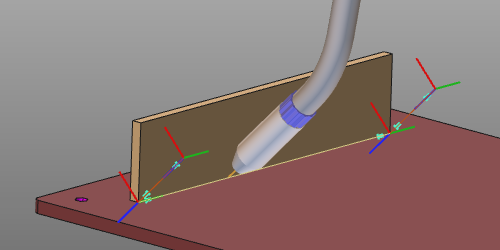
焊接周期通过编程属性和事件进行计算和控制。
焊接周期:
电弧焊接支持不同的全局(焊接)周期类型。
连续式:
从起点到终点沿过程中生成单焊缝。
缝焊:
沿过程中生成若干较小焊缝组成的间断焊接。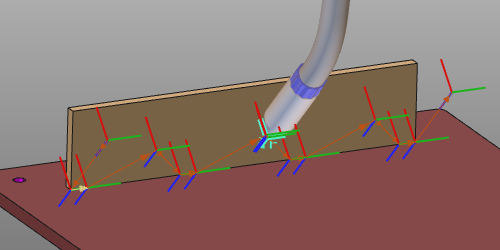
触碰:
在焊接部件上的一个或多个定义位置生成点周期,用于缝线搜索或测量操作。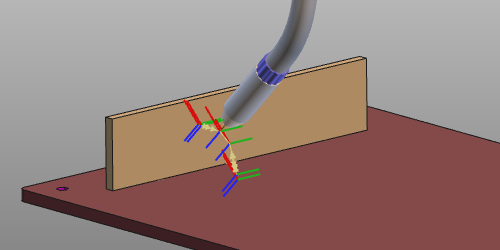
点焊:
在定义的位置生成焊接点(点)周期。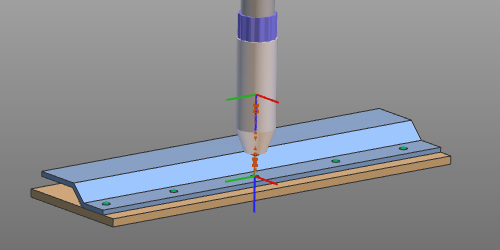
除了这些全局周期外,还可以应用特殊功能或例程以实现最大优化、效率和性能。
盒式焊接:
扩展全局焊接周期,其中在路径的起始和结束位置,焊接参数需要与周期其他部分不同。例如在角落,以避免碰撞到达路径。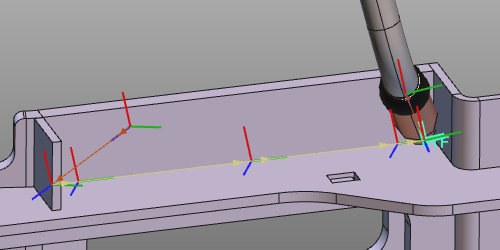
过程方向:
仅在1-或2-旋转轴位置器携带工件且位置器(运动)连接到控制器的情景下有效。在每个工具路径位置,位置器轴以某种方式操纵,使焊接工具法向方向(因此焊缝)保持在手持下位置。在手持下位置中,液态焊接材料保持原位。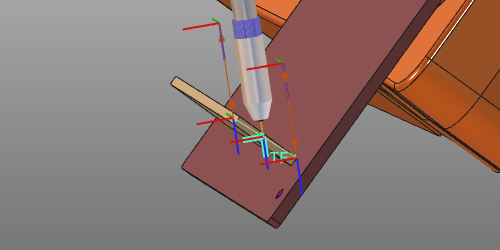
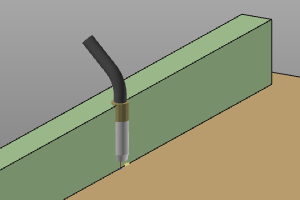
工具角度:
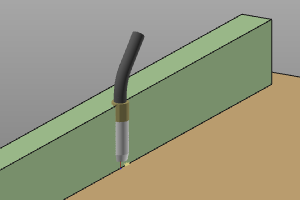
通常有三个工具角度来定义焊炬的方向,从其名义位置开始。
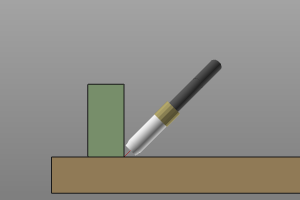
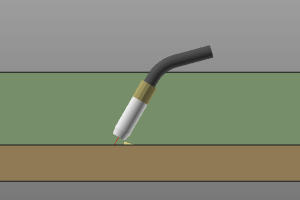
工件 工作 焊炬
工具对准:
每个工具都有一个工具框架,用于将其正确放置在工具路径中。至关重要的是,这个框架与过程几何的方向对齐,以得到正确的结果。这种对准是工具框架与过程几何之间的映射。
在创建过程几何时,已经定义了一个法向和一个切向,即行程方向。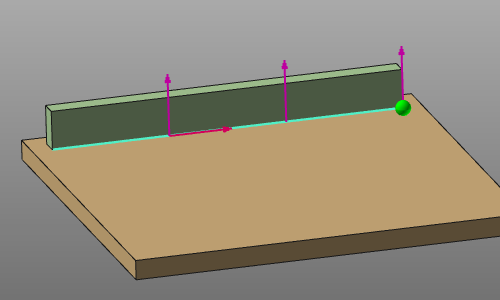
通过对准属性,必须将工具框架轴与这些方向进行映射,以正确对准工具。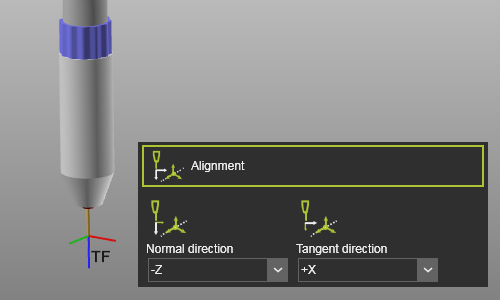

通过触摸感应进行缝线检测:
焊接操作可以使用触摸感应方法扩展缝线校准操作,以确定焊缝位置。
实施了两种方法:
方法 描述
用电线触碰:
通过部件与焊线的碰撞确定焊接部件的位置。根据需要消除的自由度数,必须定义触摸次数。焊接过程开始前对部件位置进行校准。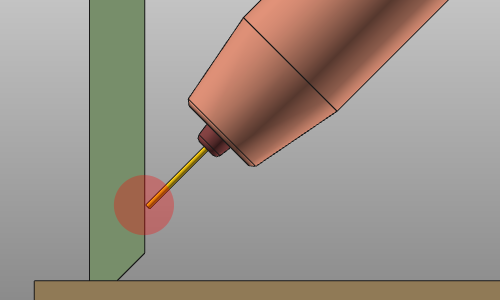
用喷嘴触碰:
通过部件与焊炬喷嘴的碰撞确定焊接部件的位置。根据需要消除的自由度数,必须定义触摸次数。焊接过程开始前对部件位置进行校准。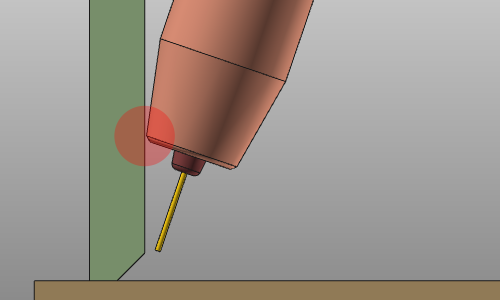
编程属性:
编程属性在“编程默认”和“活动程序”仪表板中的显示由Settings.xml文件定义。通过标准安装,默认文件位于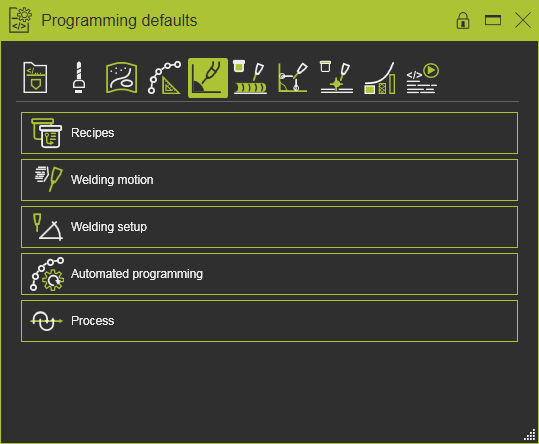
定义了以下通用属性。
技术选项 卡容器 属性 说明 
程序基础
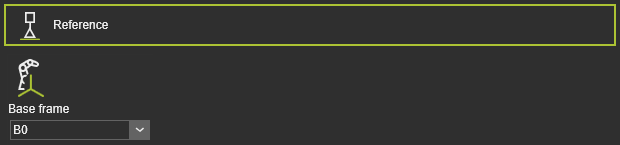
程序参考信息。 基础框架 程序的参考框架。

工具数据 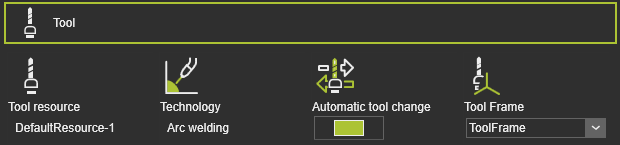
工具信息。 工具资源 工具名称。 技术 应用的技术。 自动工具更换 工具框架 执行工具路径的工具框架。
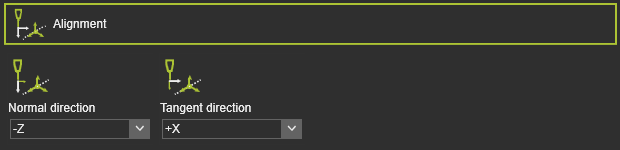
工具框架轴与对应的过程几何向量的映射。 法向方向 工具框架Z轴与过程几何法向方向的对齐。 切向方向 工具框架X轴与过程几何切向方向的对齐。

制造几何 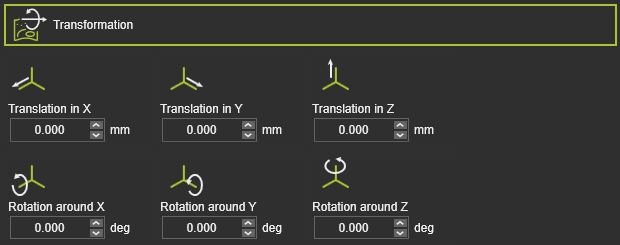
制造几何的整体变换。 X, Y, Z方向的全局平移。 X, Y或Z轴的全局旋转。 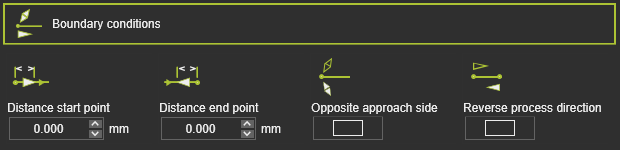
用于计算工具路径的制造几何的边界条件。 起始点距离 从过程几何起始位置到第一个处理点的距离。 终点距离 从过程几何终点到最后一个处理点的距离。 对侧接近 于制造起始位置处反转接近侧。 反向生产方向 反转制造过程方向,即改变起始和终止位置。

工具路径计算 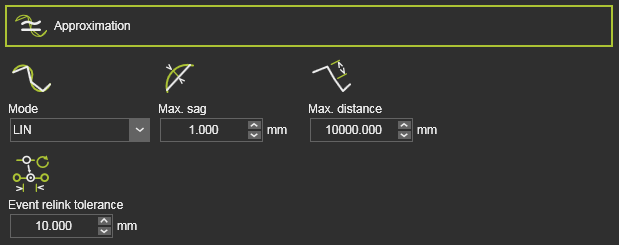
计算工具路径的制造轮廓的近似。 模式 近似轮廓的模式。 最大凹陷 允许的几何和计算工具路径之间的最大偏差。 最大距离 沿轮廓相邻的两个处理工具路径元素之间的最大距离。 事件重新链接容限 在工具路径重新计算后找到最近TPE的容限,以分配现有事件。这一属性默认隐藏。
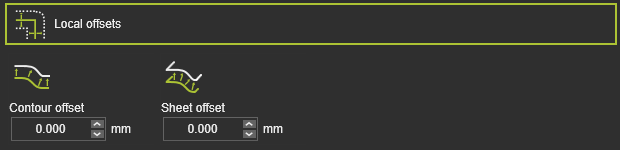
工具路径元素从制造几何上原始位置的偏移。 轮廓偏移 双切向偏移。 板材偏移 (表面)法向偏移。 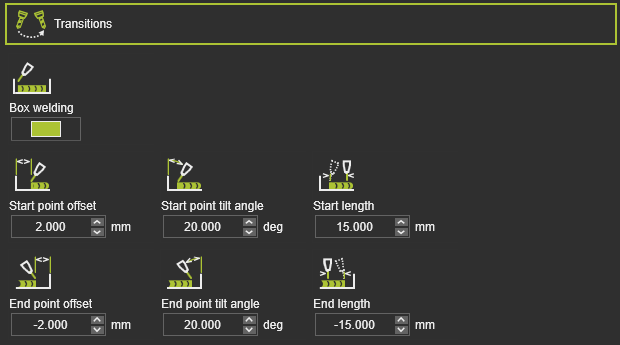
从工具路径的非处理部分到处理部分的过渡。 盒式焊接 启动盒式焊接过程。 起始/终点偏移 将实际起始或终点位置从制造几何边界限制处移动的偏移。 起始/终点倾角 工具在起始或终点位置的倾角(工作角度)。 起始/终点长度 起始或终点位置的过渡长度,工具倾角在此处改变为默认的工作角度。
技术基础 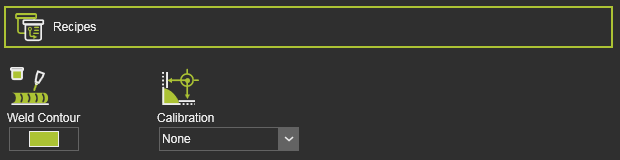
电弧焊接配方。 焊接轮廓 在选择的过程几何上定义轮廓焊接操作的开关。 校准 选择包括焊缝校准的方法。 其他 每种缝线校准方法可能在此显示其他属性。
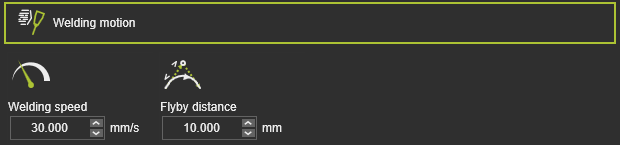
焊接工具运动。 焊接速度 焊接速度。 上桥距离 焊接路径的运动精度。
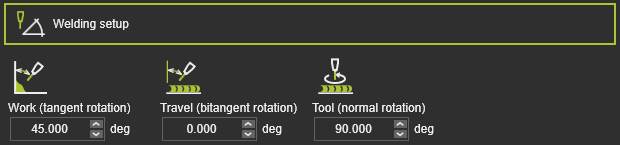
工具路径上计算出的焊炬焊接角。 工作角(切向旋转) 工作角,即切向旋转角。 行程角(双向旋转) 行程角,即双向旋转角。 工具角(法向旋转) 工具角,即法向旋转角。
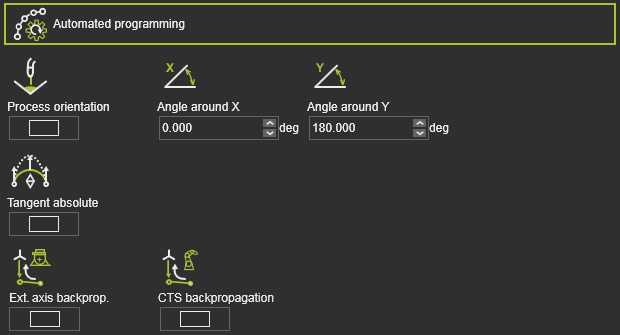
计算工具路径的附加(优化)条件。 过程定向 开关,使用位置器轴优化每个工具路径元素,以保持工具轴在下手位置。仅当携带工件的1至2轴位置器连接到控制器时可用。 切向绝对 开关,自动应用操作过程中路径的切向绝对方向。第一个处理点的切向方向将被用作参考。 扩展轴反向编程 在操作过程中路径的第一个位置设置的外部资源,比如位置器的轴值,将向后传播到该路径的接近部分。 CTS 反向传播 在操作过程中路径的第一个位置设置的制造资源的配置、旋转和奇点状态,将向后传播到该路径的接近部分。

过程条件 焊接程序 (预定义的)焊接程序编号。 摆动 激活沿处理工具路径的摆动模式运动。 摆动频率 摆动模式的频率。 摆动宽度 摆动模式的振幅。 摆动时间1 摆动模式的左停留时间。 摆动时间2 摆动模式的右停留时间。

焊接 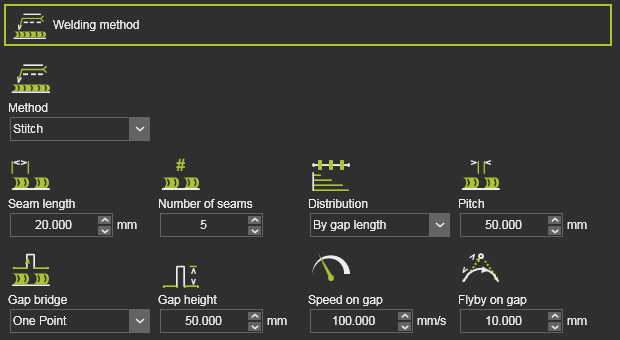
焊接方法和焊缝尺寸。 方法 焊接方法,即连续或缝焊。 对于缝焊: 缝焊长度 缝焊的长度。 缝数量 缝焊的数量。 分布 缝焊沿工具路径的分布。
通过终点位置: 缝焊均匀分布在工具路径长度上。一个系统最小节距决定了可容纳的缝焊最大数量。如果未达到此最小值,将应用缝焊数量属性。
根据间隙长度:缝焊由节距长度确定。结合缝焊长度,确定可以在工具路径上应用多少缝焊。因此,可能出现总缝焊长度小于制造长度的情况。 节距 两个缝焊之间的非焊接过渡间隙。
间隙桥 在两个缝焊之间移动的间隙桥。 缝隙高度 间隙桥的偏移,即高度。 缝隙速度 桥路径上的速度。
缝隙飞越 到达桥位置的精度。
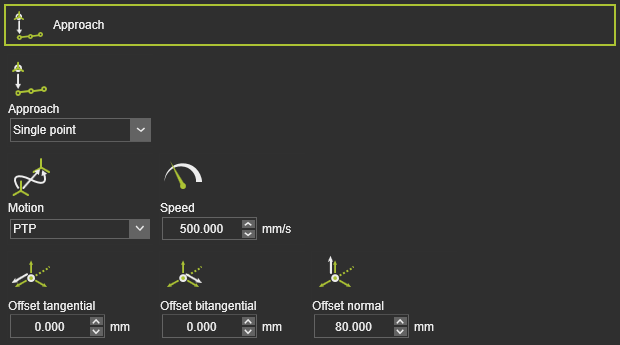
定义向处理工具路径的接近运动。 接近阶段的数量。
运动类型 接近运动的类型。 速度 接近速度。 切向/双向/法向偏移 从处理工具路径起始元素的接近步骤的局部偏移。
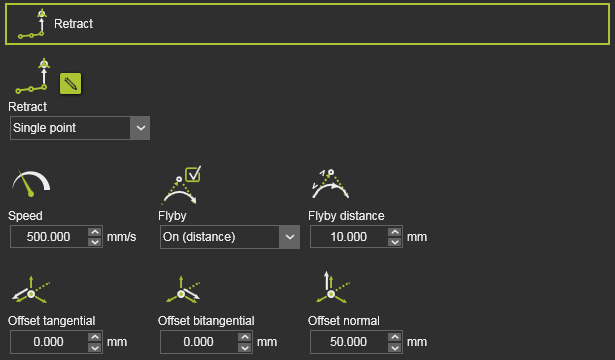
定义远离处理工具路径的收缩运动。 收缩阶段的数量。 速度 收缩的速度。 飞越 允许运动使用飞越精度(到距离)或强制运动到收缩位置(关闭)。 飞越距离 收缩路径上的运动精度。切向/双向/法向偏移 从处理工具路径结束元素的收缩步骤的局部偏移。

触摸感应 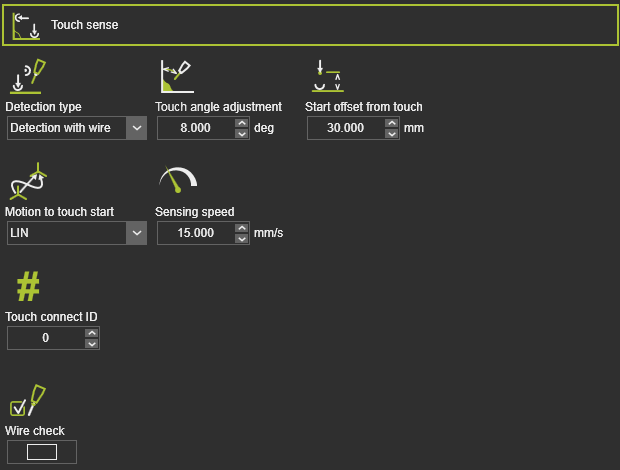
触摸感应周期的定义。 检测类型 使用哪部分焊炬进行触摸。检测可以用焊炬的喷嘴或焊丝进行。 触摸角度调整 喷嘴的角度校正,相关于处理工具角度,接近触摸位置。 从触摸位置的起始偏移 周期起始位置到触摸位置的偏移。 到触摸起始的运动 向触摸周期起始位置的运动类型。 触摸周期的速度。 触摸连接ID 触摸周期标识符。(仅焊丝触摸) 检查焊丝 选择在触摸之前包括额外的焊丝存在检查周期。

接近和收缩运动。

电弧点焊(默认隐藏) 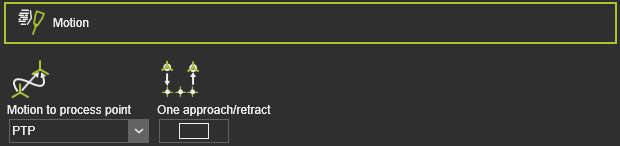
点操作的运动属性。 向工艺点的运动 从接近到点位置的运动类型。 一个接近/收缩编程点组时,在第一个点处仅有接近,在最后一个点处仅有收缩。
接近和收缩运动。

工具路径质量评估 
工具路径质量评估标准。具体内容可能因技术而异。 不可达性 评估机器人或机器的不可达情况。 碰撞 评估碰撞情况。 奇点 评估机器人或机器的奇点情况。 过程角度偏差 评估与参考值的过程角度偏差。 轴限位接近 评估驱动轴限位的接近程度。线性和圆形关节轴分开的评估值范围。 轴速度 评估所有驱动轴的轴速度,作为位置之间运动的(绝对)差异。
辅助命令 
执行(定制)辅助命令的属性。 过程几何 在计算过程几何上的工具路径时要运行的附加脚本。技术选项标签仅在技术插件文件夹中存在可执行脚本时出现。有关详细信息,请参见插件页面。
程序事件:
通用电弧焊接技术具有以下编程事件:
运动事件:

速度 设置后续运动的速度。
精度 设置后续运动的精度。
停留 设置在路径元素上的等待时间,使工具保持在当前位置,直到进一步移动。
加速度 设置后续运动的加速度。
IO信号事件:

等待信号 添加等待输入信号事件的活动控制器。