检查
检查
 参考指南 \ 技术包 检查
参考指南 \ 技术包 检查 
 检查操作 编程属性 程序事件 更多信息
检查操作 编程属性 程序事件 更多信息  检查操作 编写检查工具路径基本上会生成一个包含三个部分的(基于点的)循环:
检查操作 编写检查工具路径基本上会生成一个包含三个部分的(基于点的)循环:  进近(脱机过程) 检查位置(在线过程) 撤退(脱机过程)
进近(脱机过程) 检查位置(在线过程) 撤退(脱机过程) 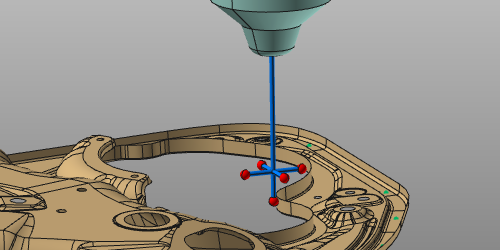 检查循环由编程属性和事件进行计算和控制。 编程属性 编程属性在编程默认值和活动程序仪表板中的显示定义在Settings.xml文件中。标准安装下,默认文件位于路径
检查循环由编程属性和事件进行计算和控制。 编程属性 编程属性在编程默认值和活动程序仪表板中的显示定义在Settings.xml文件中。标准安装下,默认文件位于路径 对于标准控制器,已定义以下属性。 技术标签 容器 属性 描述
对于标准控制器,已定义以下属性。 技术标签 容器 属性 描述  程序基础
程序基础 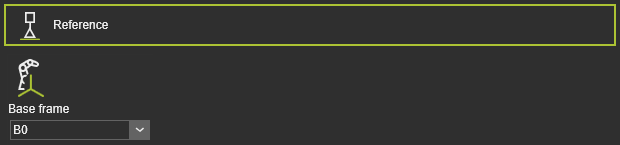 程序参考信息 基础框架 程序的参考框架
程序参考信息 基础框架 程序的参考框架  工具数据
工具数据 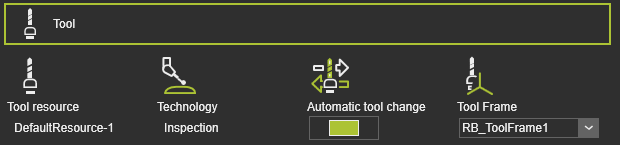 工具信息 工具资源 工具的名称 技术 应用的技术。 自动换刀 工具框架 执行工具路径的工具框架。
工具信息 工具资源 工具的名称 技术 应用的技术。 自动换刀 工具框架 执行工具路径的工具框架。  工具路径计算
工具路径计算 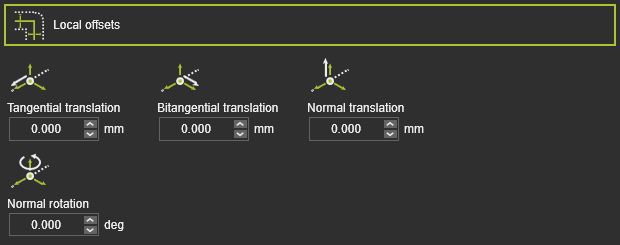 工具路径元素相对于其在制造几何体上原始位置的偏移量 切线平移 工具路径元素在切线方向的偏移量 轴向平移 工具路径元素在双切线方向的偏移量 法向平移 工具路径元素在法线方向的偏移量 法向旋转 工具路径元素围绕其法向矢量的旋转 技术基础
工具路径元素相对于其在制造几何体上原始位置的偏移量 切线平移 工具路径元素在切线方向的偏移量 轴向平移 工具路径元素在双切线方向的偏移量 法向平移 工具路径元素在法线方向的偏移量 法向旋转 工具路径元素围绕其法向矢量的旋转 技术基础 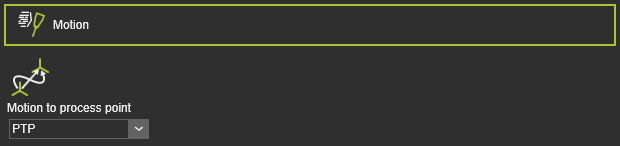 运动定义 运动到加工点 工具到达加工点的运动类型
运动定义 运动到加工点 工具到达加工点的运动类型 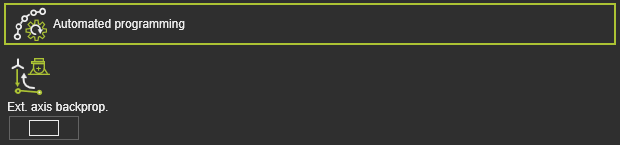 计算工具路径的附加(优化)条件 外部轴后运算 外部资源(如位置器)的轴值在在线路径的第一位置被设定,并向前传播到该在线路径的进近位置
计算工具路径的附加(优化)条件 外部轴后运算 外部资源(如位置器)的轴值在在线路径的第一位置被设定,并向前传播到该在线路径的进近位置  检查
检查 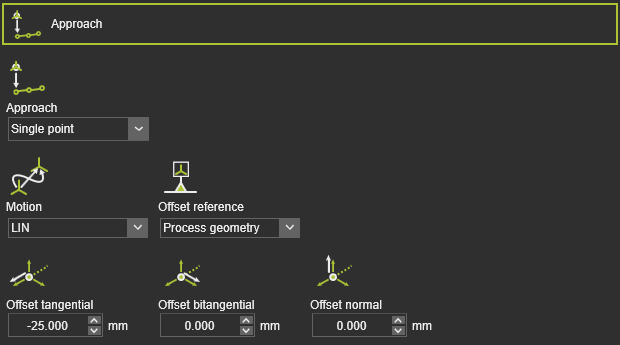 定义向在线工具路径接近的运动 进近 进近步数 运动类型 进近的运动类型 偏移参考 确定偏移方向的参考 偏移方式(切线、双切线、法线) 从在线工具路径起始元素的本地偏移
定义向在线工具路径接近的运动 进近 进近步数 运动类型 进近的运动类型 偏移参考 确定偏移方向的参考 偏移方式(切线、双切线、法线) 从在线工具路径起始元素的本地偏移 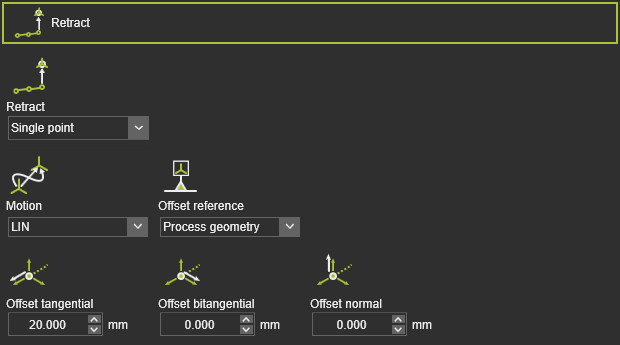 定义从在线工具路径撤退的运动 撤退 撤退步数 运动类型 撤退的运动类型 偏移参考 确定偏移方向的参考 偏移方式(切线、双切线、法线) 从在线工具路径结束元素的本地偏移
定义从在线工具路径撤退的运动 撤退 撤退步数 运动类型 撤退的运动类型 偏移参考 确定偏移方向的参考 偏移方式(切线、双切线、法线) 从在线工具路径结束元素的本地偏移  工具路径质量评估
工具路径质量评估 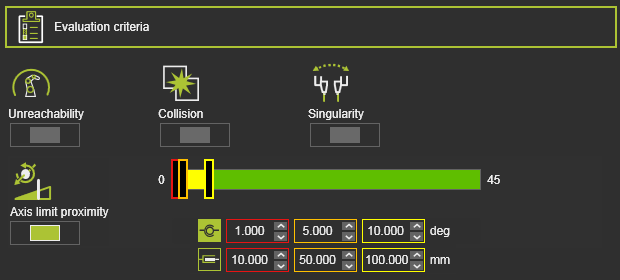 工具路径质量评估标准。具体内容可能因技术而异。 不可达性 评估机器人或机器无法到达的情况 碰撞 评估碰撞情况 奇异性 评估机器人或机器的奇异情况 轴限近似度 评估驱动轴限的近似度。对直线和圆形关节轴分别进行评价
工具路径质量评估标准。具体内容可能因技术而异。 不可达性 评估机器人或机器无法到达的情况 碰撞 评估碰撞情况 奇异性 评估机器人或机器的奇异情况 轴限近似度 评估驱动轴限的近似度。对直线和圆形关节轴分别进行评价  辅助命令
辅助命令 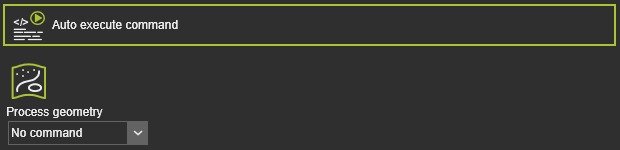 执行(自定义)辅助命令的属性 加工几何体 在加工几何体上计算工具路径时运行的附加脚本。 仅当技术插件文件夹中存在可执行脚本时,技术标签才会出现。 详情见 插件 页面。 程序事件 检查技术具有以下编程事件:
执行(自定义)辅助命令的属性 加工几何体 在加工几何体上计算工具路径时运行的附加脚本。 仅当技术插件文件夹中存在可执行脚本时,技术标签才会出现。 详情见 插件 页面。 程序事件 检查技术具有以下编程事件: 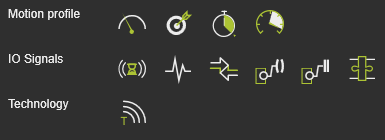 运动事件
运动事件  速度 设置随后运动的速度
速度 设置随后运动的速度  准确度 设置随后运动的准确度
准确度 设置随后运动的准确度  停留 设置工具在路径元素上的等待时间,以使其停留在当前位置直到继续移动
停留 设置工具在路径元素上的等待时间,以使其停留在当前位置直到继续移动  加速度 设置随后运动的加速度 IO信号事件
加速度 设置随后运动的加速度 IO信号事件  信号等待 添加一个等待活跃控制器输入信号的事件
信号等待 添加一个等待活跃控制器输入信号的事件  设置信号 添加一个设置活跃控制器输出信号的事件
设置信号 添加一个设置活跃控制器输出信号的事件  同步机器人 设置一个事件以同步协作机器人
同步机器人 设置一个事件以同步协作机器人  设置资源端口 设置资源的端口
设置资源端口 设置资源的端口  资源端口等待 等待资源的端口
资源端口等待 等待资源的端口  适配器执行者 设置机械父适配器的信号,以在仿真期间创建或删除机械连接。 技术事件
适配器执行者 设置机械父适配器的信号,以在仿真期间创建或删除机械连接。 技术事件  文本 插入评论 更多信息
文本 插入评论 更多信息  [检查事件](
[检查事件](