弧焊焊缝检测
弧焊焊缝检测

参考指南 \ 技术包 \ 弧焊 

焊缝检测
接触感应方法
接触方向
操作周期
接触属性
更多信息 
焊缝检测 在弧焊中,使用各种接触感应方法来进行焊缝的检测和校准是很常见的,这些方法由不同的机器人制造商和系统集成商提供。弧焊技术包包括了一些方法,这些方法包含一系列标准的、通用的参数,甚至包括制造商特定的扩展。
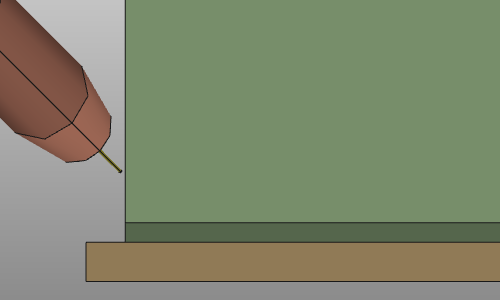
接触感应方法 实施了两种方法: 方法 描述 用线感应 通过焊接线与工件的碰撞来确定焊接件的位置。根据需要消除的自由度数量,必须定义接触次数。在开始焊接过程之前进行工件位置的校准。 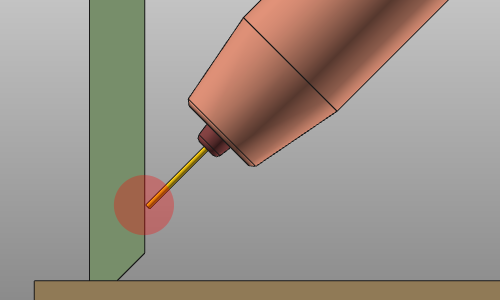
用喷嘴感应 通过焊枪喷嘴与工件的碰撞来确定焊接件的位置。根据需要消除的自由度数量,必须定义接触次数。在开始焊接过程之前进行工件位置的校准。 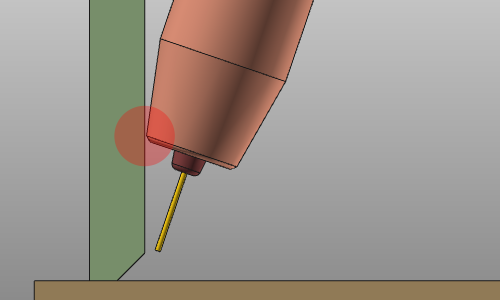
接触方向 基本上,接触感应可以在三个方向上使用: 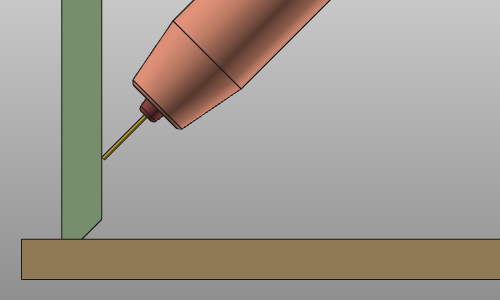
工作方向 工具方向 行进方向
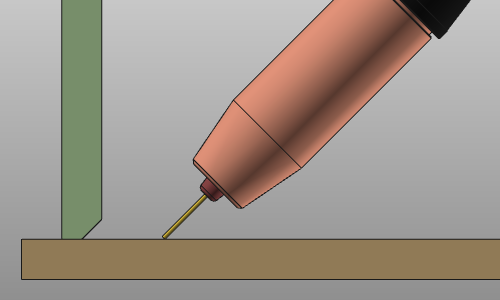
操作周期 接触操作是一个固定数量的预定义位置和运动行为的周期。喷嘴角度在编程属性中定义,并在整个接触操作过程中保持不变。 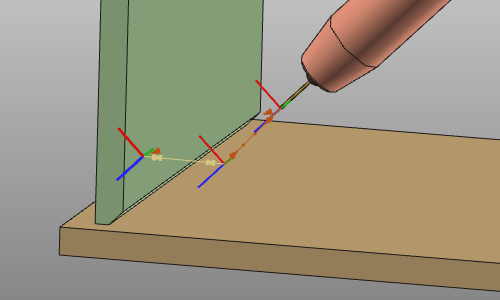

该周期包括以下位置: 位置 描述 备注 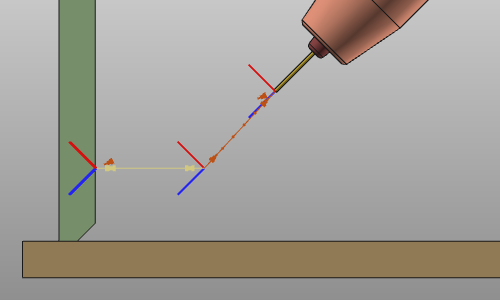
接近 接触周期开始的位置。 可选。 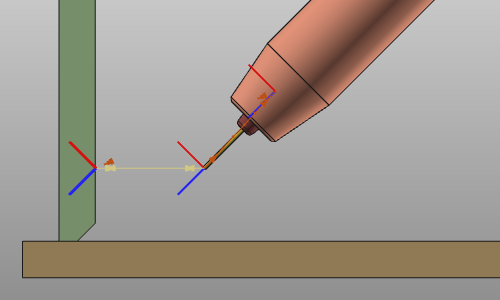
开始 接触周期的起点。 这个位置是相对于表面理论接触点的线性偏移,垂直于该表面测量。 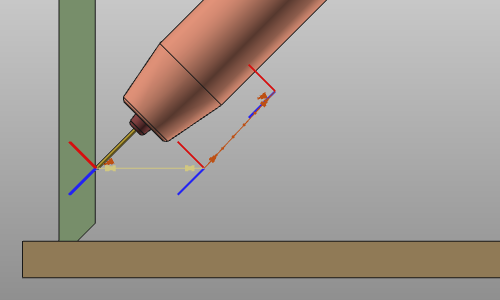
接触 接触位置。 这个位置是相对于理论接触点的线性偏移,通过焊枪从起始点向理论位置移动与焊接件碰撞确定。 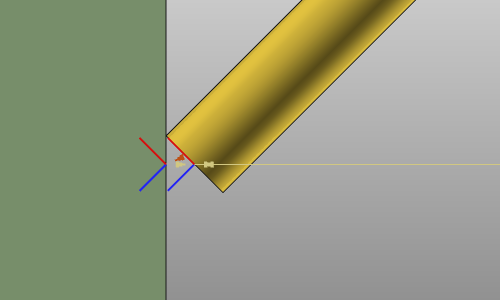
返回 接触周期的返回位置。 该位置通常与起始位置相同。
收回 接触周期结束时的收回位置。 可选。 当使用线感应方法时,操作可以选择性地扩展线检查周期。在执行线接触之前,焊枪以正常方向移动到接触点,验证焊接线的存在。该周期是起始点和接触点之间的简单线性运动,然后返回。 位置 描述 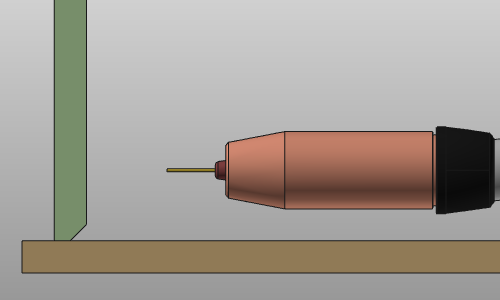
起始 接触周期的起点。 焊枪方向已设定为垂直于接触表面。 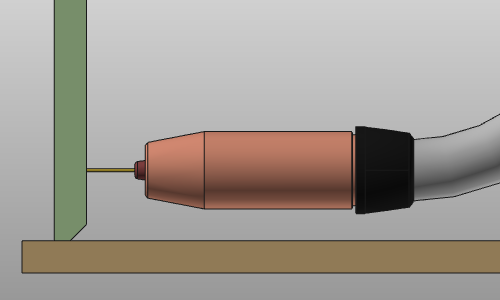
检查 (理论)接触位置,也用于线检查。
接触属性 在编程默认值的技术基础技术选项卡中,必须设置所使用的位置定义序列。 序列 描述 备注 
通过点指示接触 通过在焊接件上选择位置来定义接触位置。基于所见即所得(WYSIWYG)原则,鼠标位置计算件上的坐标。 对于每个接触方向,可以定义任意数量的接触位置。 该方法包括定义接触操作周期的一系列通用属性。其他控制器制造商的特定属性也可能可用,但未在此页面上描述。 属性 描述 备注 
检测类型 接触方法,即检测焊接件时焊枪的接触部分: 
线接触
喷嘴接触 
起始到接触的距离 从接触位置到周期起始位置的偏移量。 
感应速度 接触周期中的速度。 
接触连接ID 接触周期和校准的标识符。定义哪些焊接操作使用哪些接触校准。 
线检查 在接触之前增加额外线检查周期的选项。 仅适用于线检测方法。 
接触角度差 调整喷嘴接触角度的额外旋转。 仅适用于喷嘴感应方法。
更多信息
接触感应功能