教授操纵器
教授操纵器基本上与标准操纵器相同。使用方式、行为和响应都是一致的。
使这个教授操纵器不同的是,它是在开始教授命令时自动调用的。此外,位置仪表板略有不同。
 显示和编辑相对于当前基准框架的位置和旋转。
显示和编辑相对于当前基准框架的位置和旋转。
 显示和编辑相对于工具路径元素初始位置的位置和旋转。
显示和编辑相对于工具路径元素初始位置的位置和旋转。

 显示和编辑相对于本地参考坐标系的位置和旋转。激活或重新启动模式后,必须选择本地参考坐标系。选择参考坐标系之前,位置窗将暂时关闭。
显示和编辑相对于本地参考坐标系的位置和旋转。激活或重新启动模式后,必须选择本地参考坐标系。选择参考坐标系之前,位置窗将暂时关闭。

 切换为绝对(关)模式或相对(开)模式。在相对模式中,值会重置为零,作为新的参考。移动显示相对于此参考的新位置和方向。
切换为绝对(关)模式或相对(开)模式。在相对模式中,值会重置为零,作为新的参考。移动显示相对于此参考的新位置和方向。
 切换操纵器的方向到工具路径元素(关)或当前基准框架(开)。
切换操纵器的方向到工具路径元素(关)或当前基准框架(开)。

 切换操纵器自由移动或根据圆角步长移动。
切换操纵器自由移动或根据圆角步长移动。
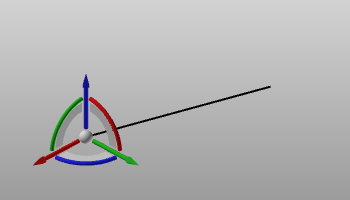
 当应用两个相对位置命令之一时,显示或隐藏参考与新位置之间的黑色连接线。
当应用两个相对位置命令之一时,显示或隐藏参考与新位置之间的黑色连接线。
 当选择工具路径元素时,教授操纵器的行为与移动操纵器相同。
当选择工具路径元素时,教授操纵器的行为与移动操纵器相同。
 操纵器 参考信息
操纵器 参考信息