最小二乘法校准

LB 工作台 \ 组合布局 \ 编辑布局组件 [](pref_layout.md) 校准
OLP 工作台 \ 设置 OLP \ 设置工件 [](pref_layout.md) 校准 最小二乘法校准 

校准
参考坐标系
导入
选择点
计算
校准结果选项 
校准 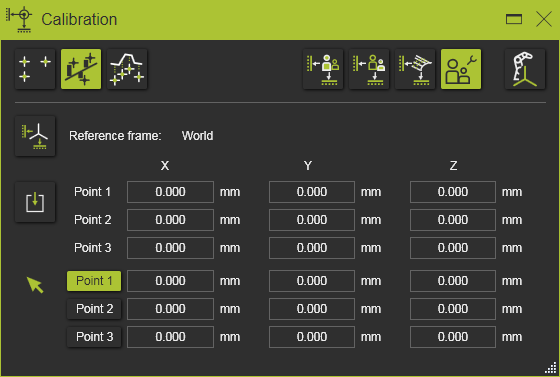
最小二乘法校准通常用于在虚拟工作单元中正确定位(运动学)资源,例如工件定位器。该校准基于数学精确的方法,利用组件上的多个静态点,这些点可以在实际部件上进行测量,并可以在虚拟部件上选择相应的位置。该方法将这些点集带入一致性,从而移动组件。该方法也适用于可以清晰定义位置并进行测量的工件,例如厚板焊接零件。 校准使用的是线性最小二乘法,该算法基于最小化测量值和预期值之间偏差平方和的方法。 
参考坐标系 
参考坐标系按钮是一个选项,用于指定导入的测量点所使用的参考坐标系统(校准参考坐标系)。默认使用世界坐标系。
导入 
校准的输入是一组测量坐标,例如实际工作单元中工件定位器的真实终点位置。这些坐标通常从外部文件中导入,但也可以手动输入或修改这些值。 测量点的输入文件是一个简单的文本文件,按行读取。它的第一行是可选的单位指示符,后面是三行坐标。坐标行必须包含三个坐标值,以分号分隔。每一行都被解释为一个点的 X、Y 和 Z 坐标。默认情况下,这些点将被导入到三维空间的世界坐标系统中,但另一个参考坐标系统可以在仪表板上定义。下面是一个这样的导入文件的示例。 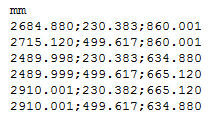
坐标的单位在文件的第一行中指定。任何软件已知的单位都可以在这里使用。它可以是完整名称或该单位的标准缩写。然而,如果文件中缺少单位行,导入时将使用系统默认单位读取坐标。 
坐标的小数点符号与语言和地区设置无关。它始终必须是一个点“.”。 
尽管在导入文件中已经指定了单位,仪表板将根据当前系统单位显示坐标。必要时这些值将进行转换。 通过导入按钮读取物体在实际工作单元中的测量位置数据。文件浏览器将出现以选择数据文件。测量的坐标显示为三维空间中的白色球体。此默认颜色可以在设置中更改。 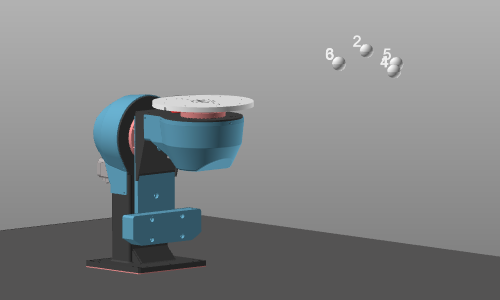
导入结果显示在仪表板的参考部分。当需要时可以在这里修改测量位置的坐标值。 
选择点 
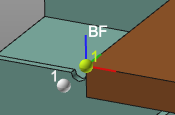
在这里显示组件的选择点。这些校准点可以直接在工件或资源上选择。它们显示为绿色球体。此默认颜色可以在设置中更改。 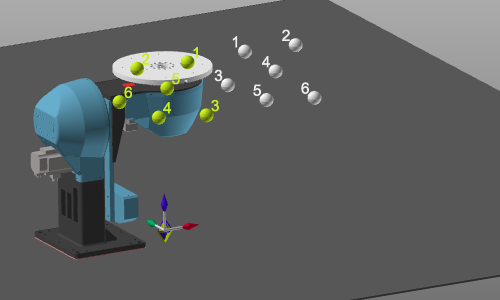
任何时候都可以通过选择三维表示或在仪表板中单击项目激活一个点。然后可以选择一个新点或在仪表板中更改其坐标。 
计算 所有步骤完成后,校准结果将立即执行。然而,仪表板将继续打开。允许更改任何输入,并实时重新计算校准。关闭仪表板或启动任何其他命令将以最后计算的解决方案终止校准。
校准结果选项 校准的结果是组件的转换。可以在结果选项中定义应用方式。 初始情况。

创建一个新的子适配器 在校准组件的根部将创建一个新的机械子适配器;CalibPlug。组件本身没有转换。新适配器可以用于根据校准坐标重新定位组件。 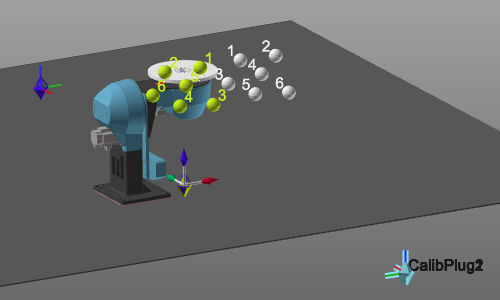
对于以下结果选项,必须将组件连接到另一个组件,例如安装在地板上的工件定位器。待校准组件的子适配器已连接到另一个组件的父适配器。 
定义转换 组件将移动到校准位置,但适配器不会改变。两个连接组件之间将有一个偏移。显示两适配器之间的连接线。 

移动子适配器 组件移动到校准位置。其子适配器随着转换移动。这会产生组件定义的修改。因此需要再次保存。 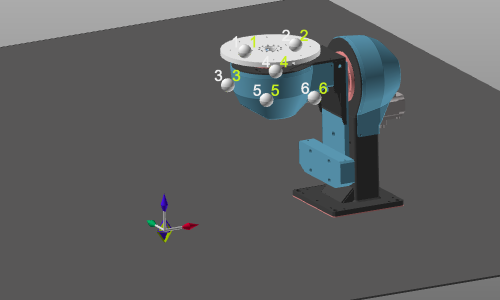

移动父适配器 组件移动到校准位置。连接组件的父适配器随着转换移动。这会产生连接组件定义的修改。因此需要再次保存。 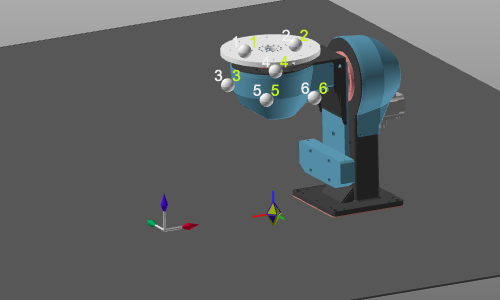

创建基准框架选项是一个开关,用于在第一个选择点创建一个附加的基准框架。