3点校准

LB工作台 \ 组合布局 \ 编辑布局组件 [](pref_layout.md) 校准
OLP工作台 \ 设置OLP \ 设置工件 [](pref_layout.md) 校准 

校准
参考框架
导入
选择点
计算
校准结果选项 
校准 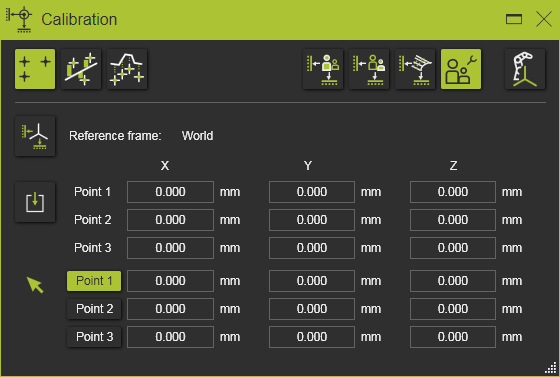
三点校准用于在虚拟工作单元中正确定位工件或资源,例如夹具。校准基于一种精确的数学方法,通过在组件上确定的三个静态点,这些点可以在实际部件和对应的虚拟部件上进行测量和选择。该方法将使这两组点趋于一致,从而移动相应的组件。 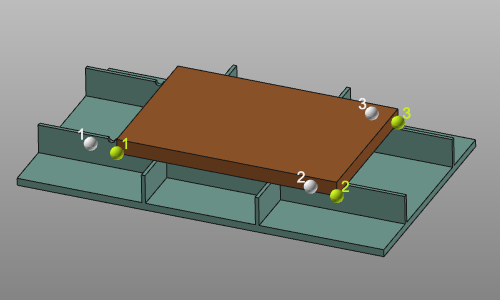
参考框架 
参考框架按钮是指定参考坐标系统(校准参考框架)的一个选项,其中被测点被导入。默认情况下,使用世界坐标系统。
导入 
校准的输入是一组三个测量坐标。通常这些坐标是从外部文件中导入的,但也可以手动输入或修改这些值。含有被测点的输入文件是一个简单的文本文件,以逐行读取。它可能有一个可选的第一行作为单位指示符,随后是三行坐标。坐标行必须包含确切的三个坐标值,用分号分隔。每一行解释为一个点的X、Y和Z坐标。默认情况下,这些点被导入到3D空间的世界坐标系统,但在仪表板中可以定义另一个参考坐标系统。下面显示了这样的导入文件示例。 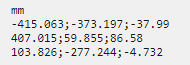
文件的第一行指定坐标单位。任何已知的软件单位都可以在这里应用。它可以是全名,也可以是该单位的标准缩写。然而,当文件中缺少单位行时,导入将默认使用系统单位来读取坐标。 
坐标的小数点符号与语言和地区设置无关。它总是必须是一个点“.” 
虽然在导入文件中指定了单位,仪表板将根据当前系统单位显示坐标。必要时会转换这些值。 通过导入按钮,可以读取对象在实际工作单元中的测量位置数据。会显示一个文件浏览器以选择数据文件。测量的坐标在3D空间中显示为白色球体。此默认颜色可以在设置中更改。 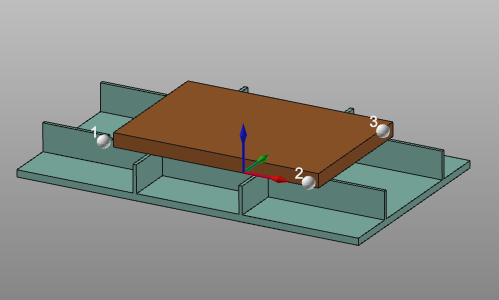
导入结果在仪表板的参考部分显示。必要时,可以在这里修改测量位置的坐标值。 
选定点 
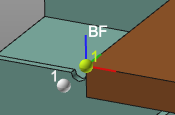
这里显示了组件的选定点。这些校准点可以直接在工件或资源上选择。它们显示为绿色球体。此默认颜色可以在设置中更改。 
在任何时候,都可以通过选择3D表示或点击仪表板中的条目来激活一个点。然后可以选择一个新点或在仪表板中改变其坐标。 
计算校准结果将在所有步骤完成后立即计算。然而,仪表板仍然保持打开状态。它允许改变任何输入,并且可以实时重新计算校准。关闭仪表板或启动任何其他命令将终止校准,并以最后计算的解决方案结束。
校准结果选项 校准结果是组件的变换。其应用方式可以在结果选项中定义。初始情况。 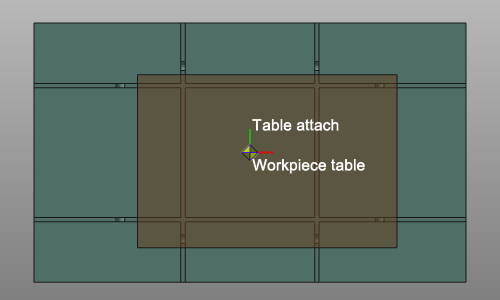

创建一个新的子适配器 在校准组件的根部将创建一个新的机械子适配器; CalibPlug。组件本身不会被变换。新适配器可以用于根据校准坐标重新定位组件。 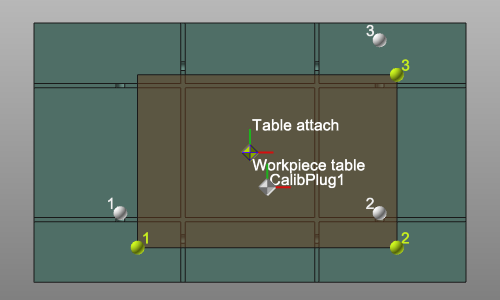
对于以下结果选项,组件必须附加到另一个组件;例如放置在桌子上的工件。待校准组件的子适配器已连接到另一个组件的父适配器。 
定义变换 组件将移动到校准位置,但适配器不会改变。两个连接组件之间将有一个偏移。显示两适配器之间的连接线。 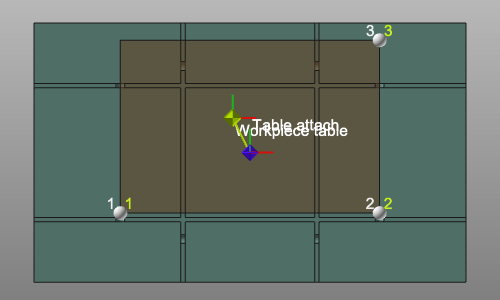

移动子适配器 组件将移动到校准位置。其子适配器随变换移动。这将修改组件定义,因此需要重新保存。 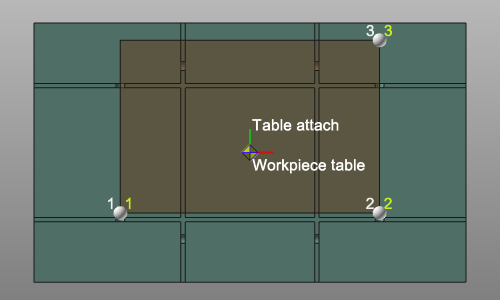

移动父适配器 组件将移动到校准位置。连接组件的父适配器随变换移动。这将修改该连接组件的定义,因此需要重新保存。 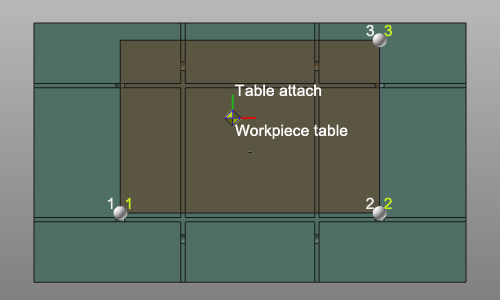

创建基准框架选项是一个开关,用于在第一个选定点创建一个额外的基准框架。