常见事件
常见事件
 参考指南 \ OLP \ 事件 参考指南 \ 技术包
参考指南 \ OLP \ 事件 参考指南 \ 技术包  技术常见事件 运动轮廓
技术常见事件 运动轮廓  速度 设置随后的运动速度。
速度 设置随后的运动速度。 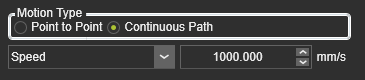 运动类型: 点到点 连续路径 属性: 速度 (mm/s) 百分比 (%)
运动类型: 点到点 连续路径 属性: 速度 (mm/s) 百分比 (%)  精度 设置随后的运动精度。
精度 设置随后的运动精度。 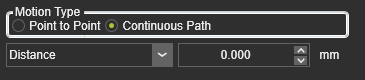 运动类型: 点到点 连续路径 属性: 开 关 距离 (mm) 关节距离 (%) 方向 (度) 速度 (%)
运动类型: 点到点 连续路径 属性: 开 关 距离 (mm) 关节距离 (%) 方向 (度) 速度 (%)  停顿 设置在路径元素上的等待时间,让工具保持位置直到继续移动。
停顿 设置在路径元素上的等待时间,让工具保持位置直到继续移动。  属性: 时间 (秒)
属性: 时间 (秒)  加速度 设置随后的运动加速度。
加速度 设置随后的运动加速度。 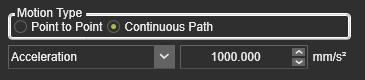 运动类型: 点到点 连续路径 属性: 加速度 (mm/s²) 百分比 (%) IO信号
运动类型: 点到点 连续路径 属性: 加速度 (mm/s²) 百分比 (%) IO信号  等待信号 添加一个等待主动控制器输入信号的事件。
等待信号 添加一个等待主动控制器输入信号的事件。  设置信号 添加一个设置主动控制器输出信号的事件。
设置信号 添加一个设置主动控制器输出信号的事件。  同步机器人 设置一个事件以同步合作的机器人
同步机器人 设置一个事件以同步合作的机器人  同步模式 一个文本注释 将机器人设为合作中的领导者。 设置同步的开始或结束。
同步模式 一个文本注释 将机器人设为合作中的领导者。 设置同步的开始或结束。  设置资源端口 设置资源的端口。 应用事件后需要选择资源。
设置资源端口 设置资源的端口。 应用事件后需要选择资源。  (示例) 可以设置所选资源的可用端口。 属性: 假 / 真
(示例) 可以设置所选资源的可用端口。 属性: 假 / 真  等待资源端口 等待资源的端口。 应用事件后需要选择资源。
等待资源端口 等待资源的端口。 应用事件后需要选择资源。  适配器执行器 设置机械父适配器的信号以在仿真期间创建或删除机械连接。
适配器执行器 设置机械父适配器的信号以在仿真期间创建或删除机械连接。  属性: 已断开 / 已连接 技术
属性: 已断开 / 已连接 技术  文本 插入一个注释。
文本 插入一个注释。  属性: 字符串 技术特定事件 点
属性: 字符串 技术特定事件 点  轮廓
轮廓 



 表面
表面 