飞思德软件导航页 Guide Page
FASTSUITE 数字化工厂解决方案
FASTSUITE EDITION 2 软件介绍
基础离线编程操作
弧焊离线编程 Arc Welding
机床激光切割离线编程 Laser Cutting
机器人激光切割离线编程 Laser Cutting
自动程序优化 Automatic program optimization
生产线架设
点焊离线编程 Spot Welding
喷涂离线编程 Spraying
飞思德进阶技巧
数字孪生标准工站
FASTSUITE 使用技巧 Tips & Tricks
附录
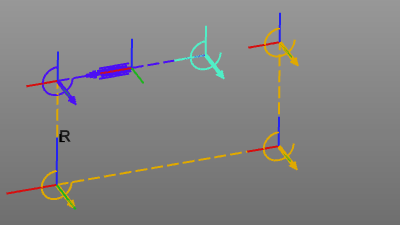
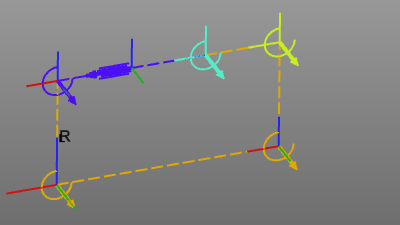
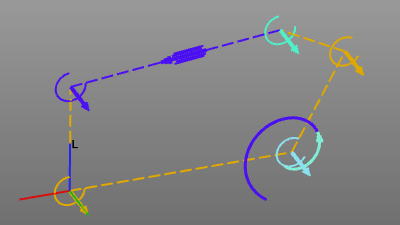
闭合运动链
RB工作台 \ 构建 \ 编辑骨架 闭合运动链命令用于将一个未驱动的关节子系统连接到(主)运动骨架中。未驱动的子系统必须在同一个运动骨架的两个驱动关节之间开始和结束。另请参阅参考指南页面。创建子系统的开始与基于驱动的骨架相同;起始连接的关节必须设置为活动状态。然后根据设计规则创建子系统。最后需要在子系统的最后一个关节上调用圆形菜单以执行闭合链命令。选择它必须连接的关节以闭合未驱动的子系统。 闭合链条并模拟