定义控制器类型

CB工作台 \ 构建 
操纵器的中心球体打开饼状菜单,以指定将要创建的控制器类型。 

重置操纵器 
选择操纵器位置 
团队控制器 
逻辑控制器 
运动控制器 控制器分为两大类。 类别 描述
运动控制器 管理制造设备的控制器。通常连接到单个机器人或机器。
逻辑控制器 控制工作单元的逻辑。通常连接到其他运动控制器。
团队控制器 控制多达16个运动控制器的团队,以实现多个机器人或机器在外部轴上的同步和同时操作仿真。 在选择控制器类别和类型后,软件会为特定控制器创建基础信息。通常包括一个根框架C,一个称为Mechanical_root_plug的机械子适配器和一个称为Electrical_root_plug的电气父适配器。根框架位于布局文档的原点。 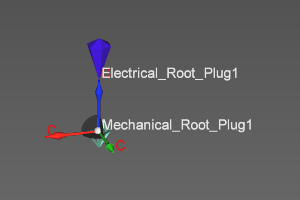
基本上,控制器已经定义。通过控制器仪表板可以完成其主要定义。