目的
|
|
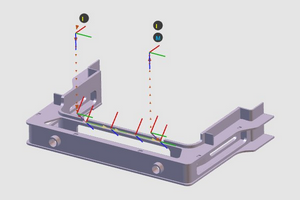
在此初级弧焊编程上,创建的程序将被修改和优化。
|
|
|
通过使用活动程序仪表板和手工示教功能,可以修改工具路径。工艺点和非工艺点操作将被更改。而且,这些属性用于从工艺几何图形生成工具路径。
|
|
|
步骤
|
|

|
确保不时保存。
|
|
|
1
|
修改工具路径计算参数
|
1.1
|

|
在活动程序仪表板中执行以下步骤。
|
|
1.2
|

|
更改本地偏移,作为输入以计算工具路径。
|
|
1.3
|

|
编程第二条工具路径。.
|
|
1.4
|

|
切换事件与示教工作环境。
|
1.5
|
|
修改近似模式以计算工具路径。
|
|
1.6
|
|
修改近似偏差以计算工具路径。
|
|
1.7
|
|
修改近似元素长度以计算工具路径长度。
|
|
|
2
|
改变焊接运动参数
|
2.1
|

|
更改焊接速度。
|
|
2.2
|
|
更改精度以到达工具路径位置,即flyby距离。
|
|
2.3
|
|
更改工作角度:即围绕TCP切线轴的旋转。
|
|
2.4
|
|
更改前行角度。
|
|
2.5
|
|
更改工具角度:即围绕TCP法向轴的旋转。
|
|
|
3
|
定义逼近离开过程路径
|
3.1
|

|
修改逼近与离开路径。
|
|
|
4
|
事件与示教
|
4.1
|

|
插入一个工具路径过程点。
|
|
4.2
|

|
删除或忽略工具路径过程点。
|
|
4.3
|

|
使用示教面板仪表板执行以下步骤。
|
|
4.4
|
|
使用“示教”面板在工具路径点之间导航。
|
|
4.5
|
|
设置机器人配置。.
|
|
4.6
|

|
删除示教的机器人配置。
|
|
4.7
|

|
使用机器人预定义的原始位置之一为仿真定义新的开始状态。
|
|
4.8
|

|
插入额外的工具路径位置。
|
|
4.9
|

|
模拟更新后的刀具路径。然后把移动方式从直线切换为点到点接着再次模拟查看两者的不同之处。
|
|
4.10
|
|
通过其直角坐标来示教工具路径位置。
|
|
4.11
|
|
通过机器人关节值来示教工具路径位置。
|
|
|
5
|
操作组
|
5.1
|
|
在活动程序仪表板中执行以下步骤。
|
|
5.2
|
|
移除操作组。
|
|
|
6
|
保存项目
|
|
6.1
|

|
用适当的名称保存项目。
|
|
|
|