目的
|
|
在此初级弧焊编程上,将为焊接轮廓生成程序。之后可以对其进行仿真。最后项目将被保存。
|
|
|
基准步骤被用于在不同的焊接路径上生成工具路径。结果将被仿真。
|
|
|
步骤
|
|

|
确保不时保存。
|
|
|
1
|
选择控制器单元
|
1.1
|

|
切换到离线编程工作台。

|
|
|
2
|
单元设置
|
2.1
|

|
检查是否已为机器人设置了弧焊技术。
|
|
2.2
|
|
创建一个新的基准Frame并将其放置在桌子上。通过此步骤,您将定义程序的原点。
|
|
2.3
|
|
重命名基准Frame。
|
|
2.4
|
|
将基准Frame设置为当前活动状态。
|
|
|
3
|
编程工具路径
|
3.1
|

|
通过使用简单的示教方法创建第一个Home点位置。将自动创建一个新的机器人程序,并启用3D视图右侧的OLP仪表板。
|
|
3.2
|

|
透视图可能有助于在3D世界中导航。
|
3.3
|
|
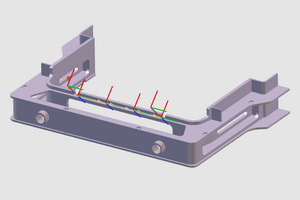
编写第一个焊接操作程序。你可以更改起点,方向和焊接下枪边。
|
|
|
|
|
4.1
|

|
模拟程序以获得第一印象。
|
4.2
|

|
在模拟程序时激活路径跟踪。
|
|
|
|
|
5.1
|

|
用适当的名称保存项目。
|
|
|
|