FASTSUITE 喷涂基础教学
===
## 课前准备
### 资源下载
- 如果您尚未安装FASTSUITE软件或未启动软件许可证,请参照 [软件试用申请与安装](../Chapters/Chapter1_TrailAndInstall.md) 来申请软件的试用。
- 点击下方的链接以获得本节教程中所需的资源档案。
- [下载链接](https://qiniu.fastsuite.cn/Wiki/rss/Material/Spraing_Training_Material.zip)
### 课程目标
- 通过工件建立与喷涂编程,了解FASTSUITE软件喷涂工艺的简单使用方式。
## 第一节:创建工件
- 在这一步中将生成一个特定的工件文件,分配专门的信息,以便能够在项目中进行离线编程和模拟。
- 首先定义工件
- 切换至工件准备工作台:
- 在导入几何图形之前,需要检查E2的导入设置,打开设置页面中的通用设定-导入通用的几何形状: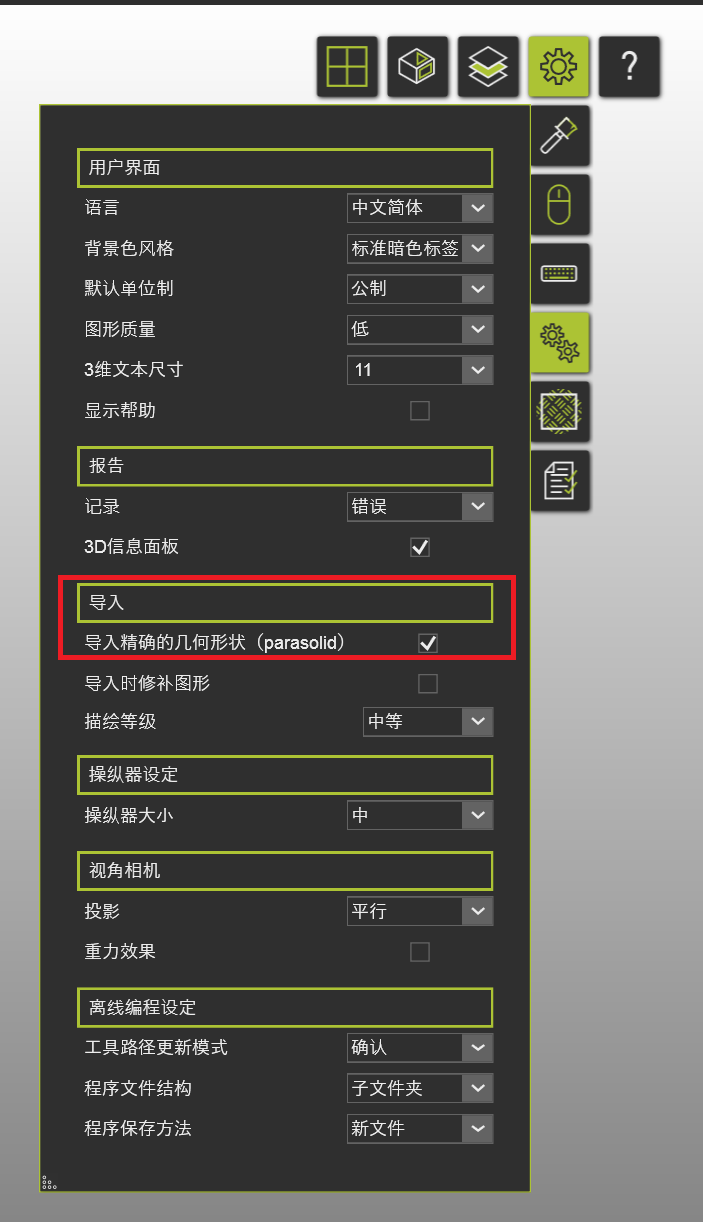
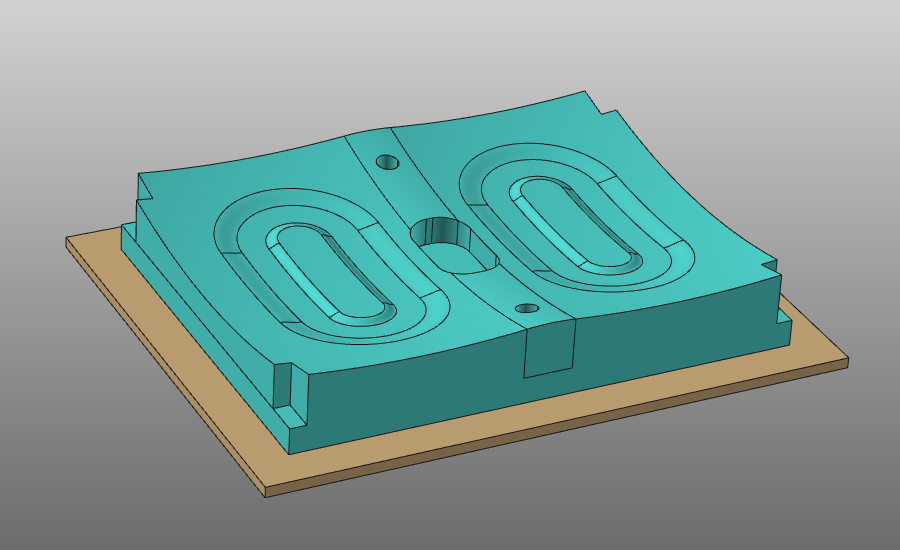
- 导入课前准备下载的资源文件```Mold_Workpiece.stp```(可以直接拖拽文件至E2中,也可以通过左上角文件-打开-文件浏览器中选择该文件打开)。提示:请参照Tips&Tricks中的直接导入工件技巧,按住W拖拽文件可以直接建立E2的工件资源。
- 关联工件的几何特征,并保存工件文件:
- 完成工件创建之后,我们需要定义加工轨迹
- 首先更改软件设置为低画质,从而在处理面工件时减轻处理器负担:
- 将路径工具设置为面:
- 通过拖动可以选择工艺几何体的面。拖动的方向决定了是否只选择完全位于框选范围内的面(从左上角拖到右下角),或者是否所有接触陷阱的面都会被选择(从右上角拖到左下角),详细使用请见Tips&Tricks中的[鼠标拖动功能](../Tips/MouseDrag.md)一节。
- 通过按下Ctrl键和拉动鼠标来删除不需要的面。
- 在工件上生成加工面:
- 更改工件表面加工法线方向,可以尝试不同的方向会生成什么样的加工姿态:
- 设置仿真对象,仿真对象是用来计算过程对该对象的影响。在本教程中,是水射流喷射接触表面的时间。首先,将整个工件纳入模拟范围内
- 软件内提供了对于面仿真的不同参数,比如可以调整有限元单位的大小等:
- 命名并保存工件。
## 第二节:创建工具

- 在这一步中将生成一个特定用于喷涂的工具,以便进行离线编程和后续的模拟仿真。
- 定义工具
- 切换至资源创建工作台:
- 导入课前准备下载的资源文件```Water_Jet_Cleaner.step```,并将其导入软件中:
- 建立工具资源:
- 设置工具的名称以及部分的参数:
- 专用于喷涂的工具设置
- 在软件右下角选择显示坐标系,该坐标将被用来定义水射流喷锥的位置。
- 将操作器移动到工具喷嘴中心:
- 将操作器的法线方向对准喷嘴板,并将操作器向内移动100毫米至最终位置:
- 在距离工具坐标140mm的位置建立工具的TCP坐标:
- 保存设置完成的工具文件。
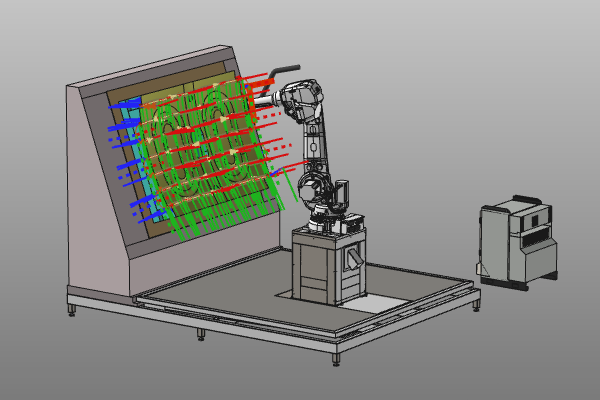
## 第三节:建立喷涂工站
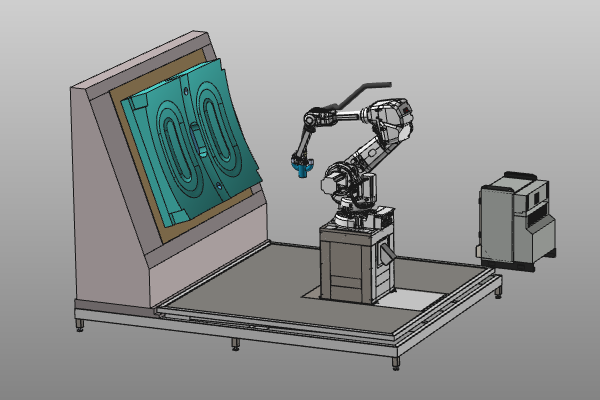
- 在这一步中将建立适用于喷涂的工站,进行离线编程和仿真。
- 首先切换到布局或离线编程工作台,如果熟悉如何进行布局可以跳过此步骤,直接加载课前准备中下载的布局文件。
- 当切换到任何工作台时,操作模式 "正常 "被自动设置为激活。当在离线编程工作台上工作时,将其切换到操作模式 "拖放",也能移动夹具组件中的各个部件。详见[拖放功能](../Subcontents/DragandSnap.md):
- 在布局中加入地板、控制器等组件:
- 在布局中加入第二步创建的工具文件:
- 将组件拖放到相应的位置,连接各自的连接器:
- 连接机器人和控制器的电气信号:
- 工站布局的保存需要在布局规划工作台中进行,但是保存的文件记录为绝对路径,教程中建议跳过此步骤,直接进行拖入工件。详见[使用文件检索功能](../Subcontents/RetriveFiles.md)
- 保存布局:
- 加入工件
- 在布局中加入工件:
- 在工程架构中检查文件状态,红色的文件表示未保存:
- 设置碰撞组
- 切换至离线编程工作台
- 定义两个碰撞组,一个分配给设备,另一个分配给工件:
- 定义两个碰撞组之间的碰撞关系:
- 保存当前工程:
## 第四节:离线编程
### 定义点为基准的运动
通过使用手动示教功能,进行位置插入以及模拟。
- 首先,切换到离线编程面板:
- 将机器人的工艺设置成喷涂:
- 创建一个新的基础坐标,并把这个坐标放在资源上。由此建立一个程序基础点:
- 重命名基座标:
- 将基座标设为激活状态:
- 通过使用示教方法创建第一个路径点,一个新的机器人程序将被自动创建,3D视图右侧的离线编程仪表板被启用:
- 你可以修改位置或插入新的点,选择工具路径点,当操纵器中心的球体呈现蓝色时,该点就处于活动状态:
- 仿真一次程序:
- 尝试删除路径点:
- 打开示教面板来修改机器人的运行组态或修改机器人关节值:
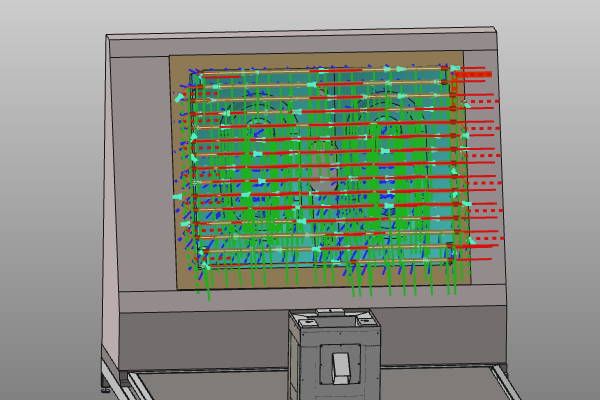
### 以面为基准进行编程
- 首先,切换到离线编程面板:
- 使用轨迹策略模式平行平面对工件表面进行编程,左键点击工件表面绿色的加工轨迹可以跳出一个红色平面,该平面为选择工件上加工路径方向的基准面,和工件重合的线条是机器人工具所走的路径;双击白色的箭头可以更改加工方向:
- 软件中提供了多种路径生成的模式:
- 1. 平面测地线: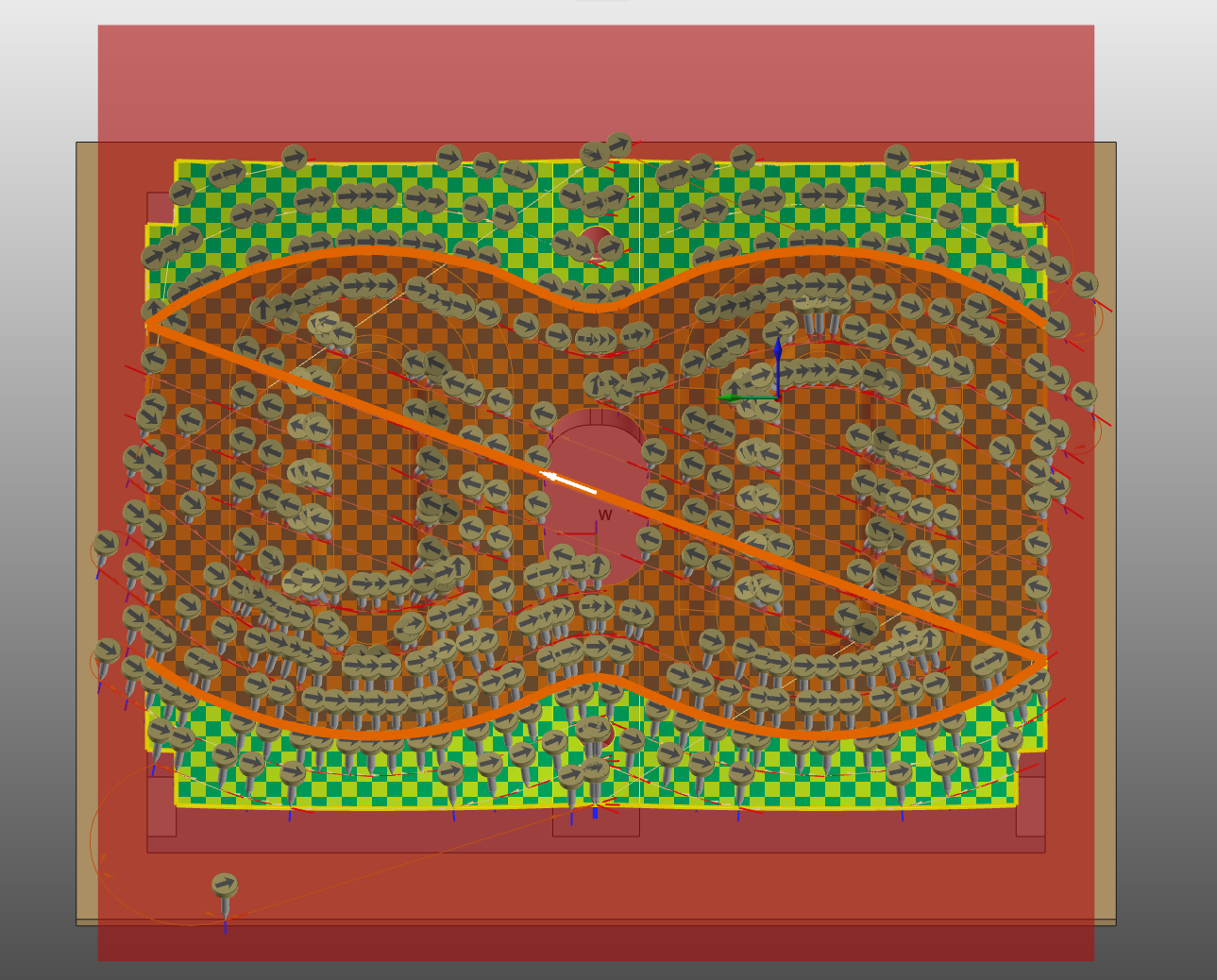 观察图片中路径点的顺序和走向,与定义路径时橙色的曲线方向一致。机器人所走的路径为工件上的等高线。双击白色的箭头可以修改加工路径走向;
- 2. 曲线测地线: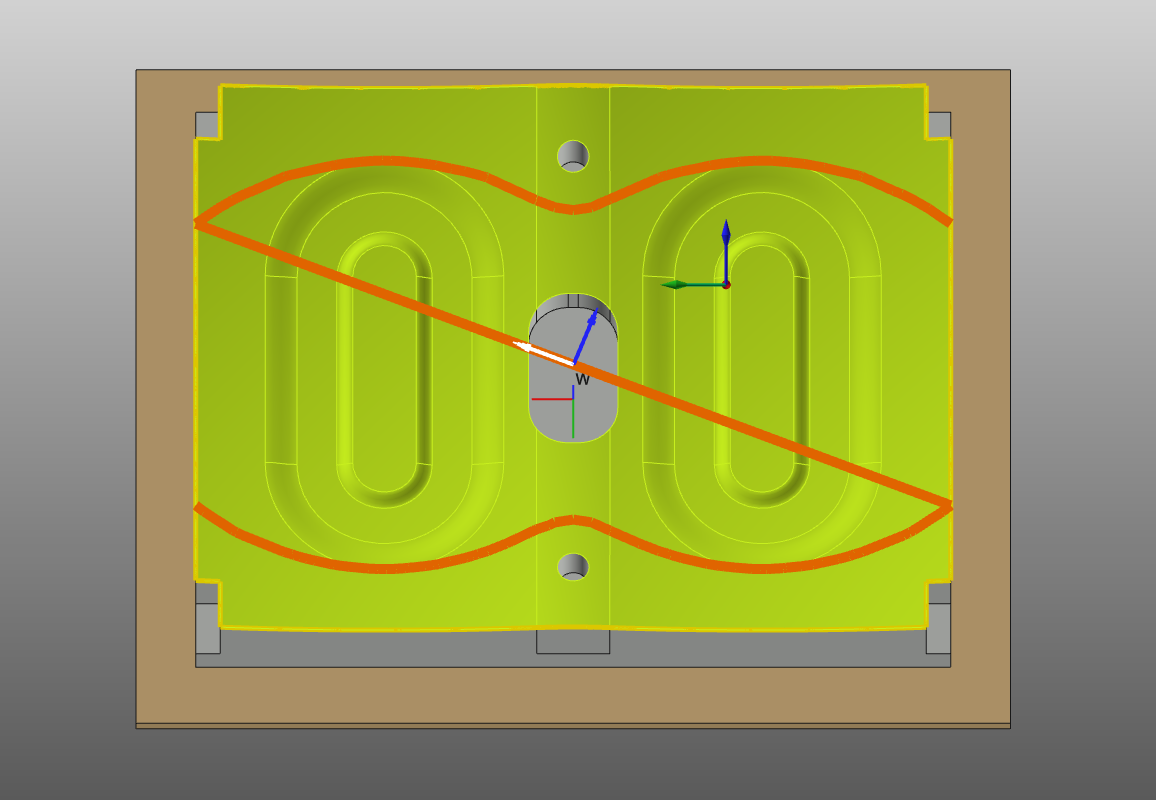 曲线测地线的加工逻辑与平面测地线类似,但可以定义加工走向为工件表面的曲线。右键点击橙色的加工线可以编辑设定平面路径所用的曲线,如视频所示
- 3. 平行面: 平行面的设定为红色的平面和工件相交处的轨迹,有且仅有橙色线一条,并不会覆盖整个工件的表面。
-
- 打开工具路径仪表盘,可以看到当前程序中的点数量以及相对应的事件,在接下来的步骤中我们会减少点的数量:
- 打开当前活跃化程序面板,参照视频中的步骤修改参数来减少点的数量:
- 修改焊枪工作参数,并进行仿真来观察其不同之处:
- 修改机器人的运行速度和精度来平滑机器人的运行状态:
- 选择面优化
- 为了在选择加工面时更灵活,我们通过手动框选需要加工的面积和范围来实现我们的加工目的:
(在点开面板后,选择轮廓线左键添加操作点,拖拽操作点完成面的范围选择。细化添加更多操作点以实现你想要的形状。)
- 轨迹优化
- 在当前活跃化程序面板中,可以查看机器人运行的方向,修改方向可以得到不同的运行模式:
- 通过修改轨迹间的间距,可以更改轨迹的密度:
- 在面板左侧中选择不同的程序将在不同的范围修改这些参数,比如最上方会对所有程序进行修改,较大的方框会对程序组进行修改,单个子程序的修改只会对当前程序起效。
- 修改参数,来更改机器人加工的区域:
- 添加或删除程序头、尾的轨迹:
- 更改两条轨迹间过渡点的运行方式:
- 定义单条轨迹中机器人的运行方式:
### 进行加工模拟
在本节中,加工模拟的是仿真水柱与工件表面接触的时间。
- 在仿真过程中开启加工模拟:
- 缩小轨迹间的距离:
- 修改后重新进行一次仿真,比较两次的不同:
- 打开过程模拟设置面板,来设置不同的显示:
- 打开仿真面板,来修改模拟使用的参数:
### 时间/膜厚仿真
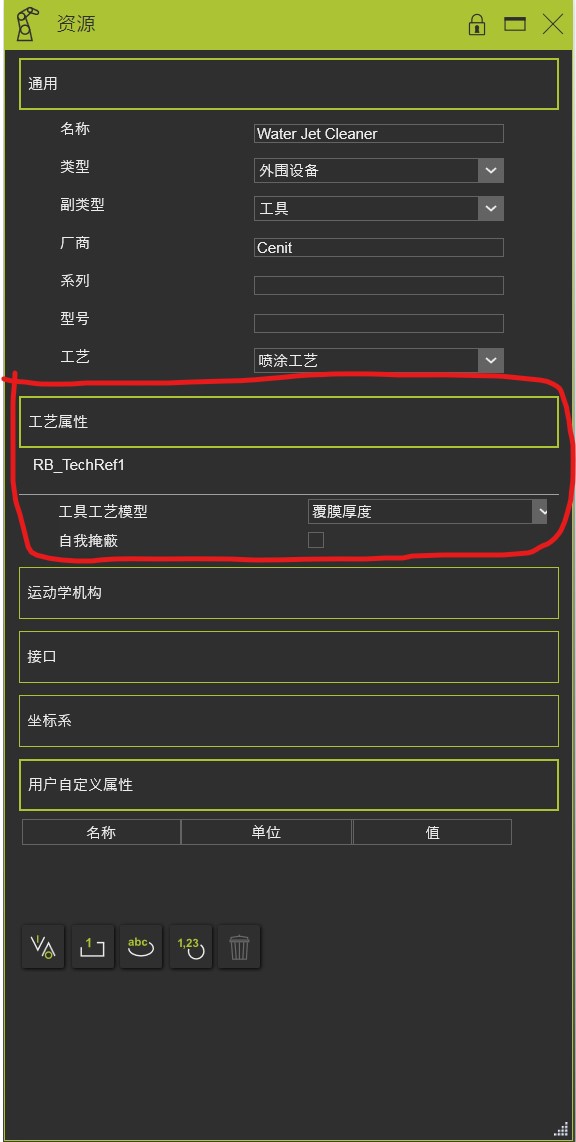
在工具资源设置界面中,首先选择```工艺```一栏中的喷涂工艺,之后会出现工艺属性一栏,如上图所示,默认参数为覆膜时间。先进行覆膜厚度仿真的讲解
#### 覆膜时间
在工具选择覆膜时间后,切换到控制器设置面板,选择右侧选项栏的第三项工艺表格,在表格中输入数字并点击加号,从而在控制器中加入所需要的工艺参数:

#### 覆膜厚度
首先,我们需要打开资源创建面板,选择我们的工具。然后,我们要将覆膜时间属性更改为覆膜厚度。这时,面板底部会出现一个选项:工艺工具工艺特性。
在工艺工具工艺特性面板上,设定位于最上方。在这里,我们可以添加设定,也可以导入或导出不同的设定。有几个需要填写的字段。第一个是描述(选填),可以描述工艺的细节,例如测量的地点或喷嘴的距离。其次,需要输入流量和固体率。
面板的下部有一个实验数据区。需要添加一组新的实验数据。这些数据应该是我们在一定距离喷嘴处测量得到的。我们把距离设定为某个厘米数,然后设置喷嘴的移动速度。完成后,我们需要填写厚度特性,厚度根据坐标值对应的厚度设定的。我们需要在不同的坐标值上填写厚度,比如,我们在负x坐标值的位置上设定一个厚度,然后在正x坐标值的位置上设定另一个厚度。当xy方向的厚度设定完成之后就可以确定仿真使用的喷嘴范围,调节他的大小到最适合现场情况的。
当然还可以添加更多数据,描述在不同位置的厚度,然后我们就可以添加新的特征坐标值。通过这种方式,我们得到了一个厚度分布曲线。
工具工艺特性是我们需要设置的第一个要素。之后,我们需要修改控制器:同样在控制器中选择覆膜时间参数,并将其更改为覆膜厚度。在覆膜厚度面板中,我们需要填写一些信息,比如序号、工艺设定名称(这个名称我们稍后需要对应)、固体率和流量、颜色以及完全不透明所需的厚度阈值。
设置完成后,我们需要回到资源设置,选择喷枪,然后重新打开我们的工具工艺特性,需要确保左侧工艺设定的名称与我们之前在控制器中设置的名称相对应。然后就可以回到离线编程界面。
最后,我们需要打开加工图层,并在其中选择覆膜厚度选项。这样,当我们开始新的仿真时,我们就可以看到新的轨迹与旧的轨迹完全不重叠,避免对轨迹判断的干扰。