第一节:资源建立
===
## 介绍
随着生产技术的发展,制造型企业的生产业务向少人化、协同式生产、柔性式生产、精益式生产、预测式生产等方向转变,数字化转型作为被一再提及的名词不再是晦涩难懂的顶尖技术,而是所有制造型企业无法回避的技术趋势和方向。为了能够从自动化车间、信息化车间逐渐向数字化车间、数字孪生车间、智能化车间迈进,许多企业都在大力发展自己的数字化转型事业部。
而生产作为其中最重要的一环,也在不断地进步与推行改革。机床、机器人等生产设备的广泛应用,为数字化车间带来了无限的潜力,数字化的将设计规划从经验和手工方式,转化为计算机辅助数字仿真与优化的精确可靠的规划设计。著名机器人厂商新松估计,数字化的生产设计可以减少产品30%的上市时间,65%的设计时间。
## 课前准备
### 资源下载
- 如果您尚未安装FASTSUITE软件或未启动软件许可证,请参照 [软件试用申请与安装](../Chapters/Chapter1_TrailAndInstall.md) 来申请软件的试用。
- 请参照[组件库的使用](../Chapters/Chapter3_ComponentLibrary.md)来下载或扩展软件的组件库。
- __请点击下方网页链接,下载教程中需要使用的资源__
- [Resource_E2](https://internal.fastsuite.cn/ShuangyuanTutorial/res/Resource_E2.7z)
### 教学目标
本次教学分为三部分:
1. 学习多个运动学资源的建立,包括气缸、卡钳以及机器人工具;
2. 学习事件的添加与使用;
3. 学习信号的交互与使用。
## 第一部分:学习如何建立多个运动学资源
### 背景知识
在工站中,共有十几个涵盖平移、旋转的运动副需要建立,如图所示:

软件操作提示:将鼠标放在需要了解的选项上,点击F1,会弹出相应的帮助菜单。(暂时只有英语版本)
#### 驱动、联动、非联动和从动关节的区分
- __驱动轴关节:__ 定义了运动链中以该关节为母体的那一部分的位置和方向。它是机器人或制造机器的一个主轴。驱动关节的运动是通过规划器或逆运动学来计算的。
- __联动轴关节:__ 与驱动轴类似,但它不能是被定义资源的主轴。通常应用于生产和工具资源。联动轴关节的运动是通过运动规划器计算的。
- __非联动轴关节:__ 非联动轴是非驱动关节,但它不是运动链的一部分,其运动由信号触发。需要定义这个关节的资源需要一个运动的角色定义。
- __从动轴关节:__ 从动轴增强了运动链,但其位置和方向不能被操纵,是其母(驱动)关节运动的直接结果。
在第一部分教程中我们将学习如何建立相互关联的(如导轨和导轨上安装的气缸)以及不相关的(如两个旋转卡钳)运动机构,并对其进行合理的设定,使其与现实机构相仿。
#### 软件基础功能
在开始制作机构前,需要先对软件内功能进行概念性的解释:
1. 操作器:操作器是软件运作的基础,为了能够进行仿真模拟,需要对所有的模型位置进行记录,操作器的作用就是选取世界坐标系中的位置并以此为基准进行操作,这样一来软件才可以进行相应的数值记录与计算;
2. 外形关联:外形关联是软件中对资源操作的最重要一环,通过将外形和相应的坐标轴、坐标系关联,能够在软件中创建可用于运动学计算、碰撞区分等功能的几何模型;
3. 运动副:运动副的本质是一个可运动的坐标系,通过将物体的几何关系与坐标系关联,建立起软件中可运动的三维模型,从而进一步可以进行仿真、碰撞模拟等功能。
4. 保存文件类型:软件提供保存文件的方式有两种,一种时生成软件可以识别的资源文件,如cenres作为资源文件类型,cenprg作为软件可读的机器人程序;另一种为cendoc文件,其会保存当前场景中所有的资源、程序以及定义,优势在于保存的内容更全面,而缺点在于保存文件大小较大。
### 一、导轨、气缸与推杆的运动学建立
主要内容:
- 建立场景中所需的运动学资源;
- 需要注意场景中各运动坐标系的联动设置,如何在软件中设置导轨上的气缸运动;
- 学习建立多个运动学资源的方法;
- 软件功能提示:通过设置可以调整是否显示鼠标掠过时目标物体的高亮:在界面右上角左键单击设置,二级菜单中选择颜色设置,鼠标掠过选项,勾选"关闭选项"即可关闭鼠标滑过时工件的高亮显示。
- 接下来建立资源的运动学定义。首先建立平移运动轴:在软件上方选项栏中选择"创建资源"场景,点选左边选项栏中"创建/编辑资源",使用操作工具将操作器粘贴到需要建立运动轴的工件上。
- 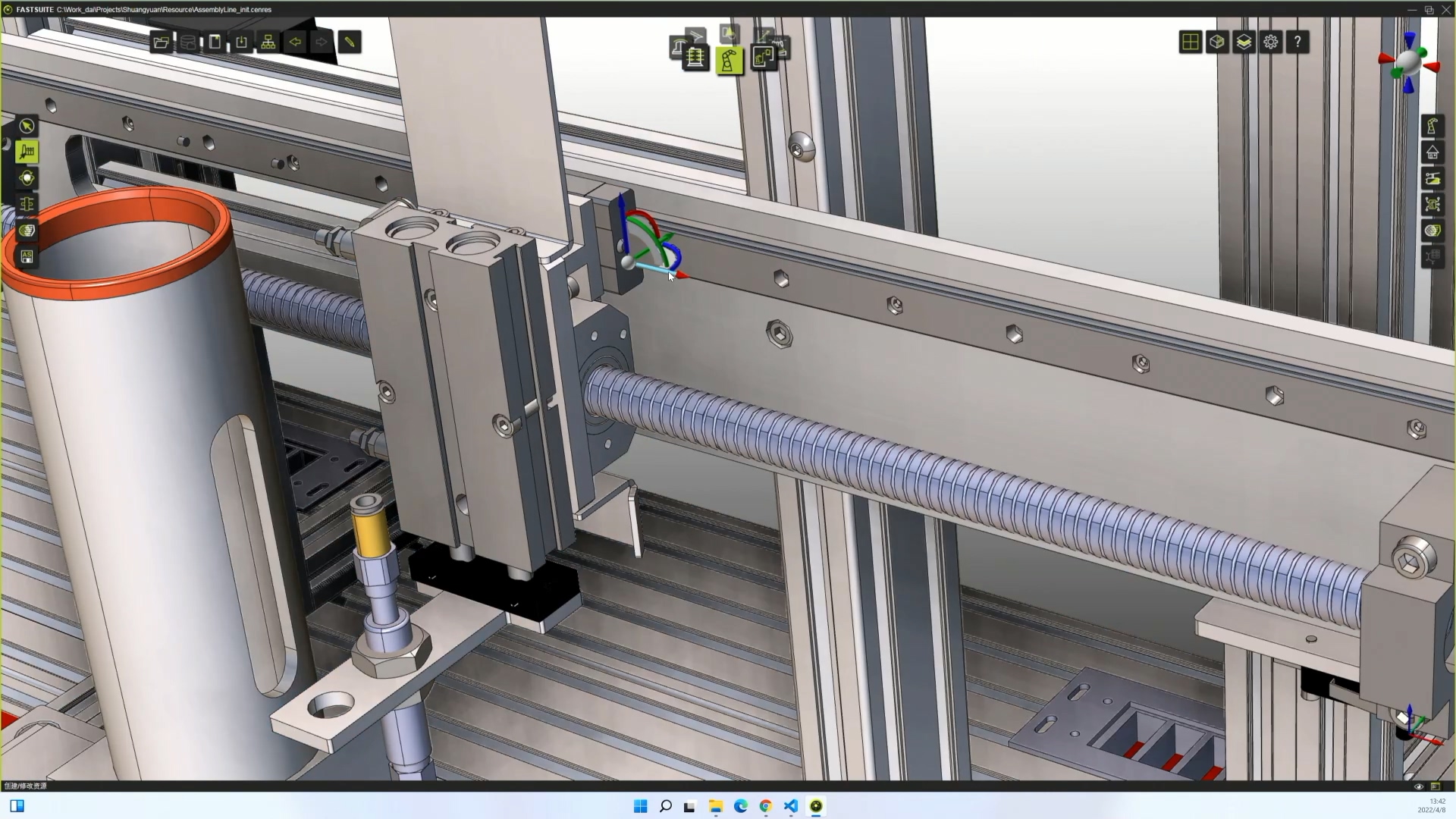
右键选择操作器X轴
- 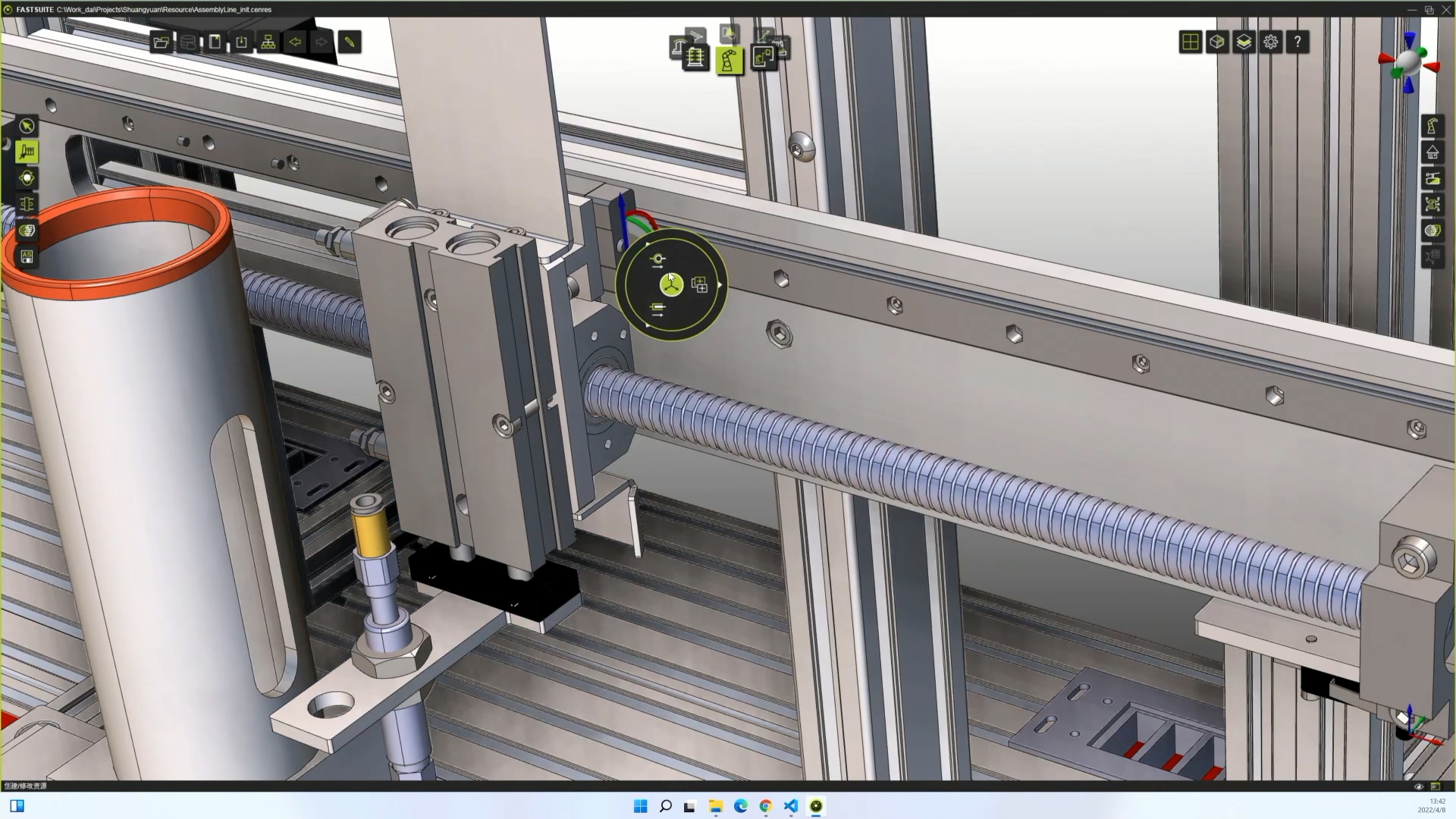
在跳出菜单中左键选择平动轴
- 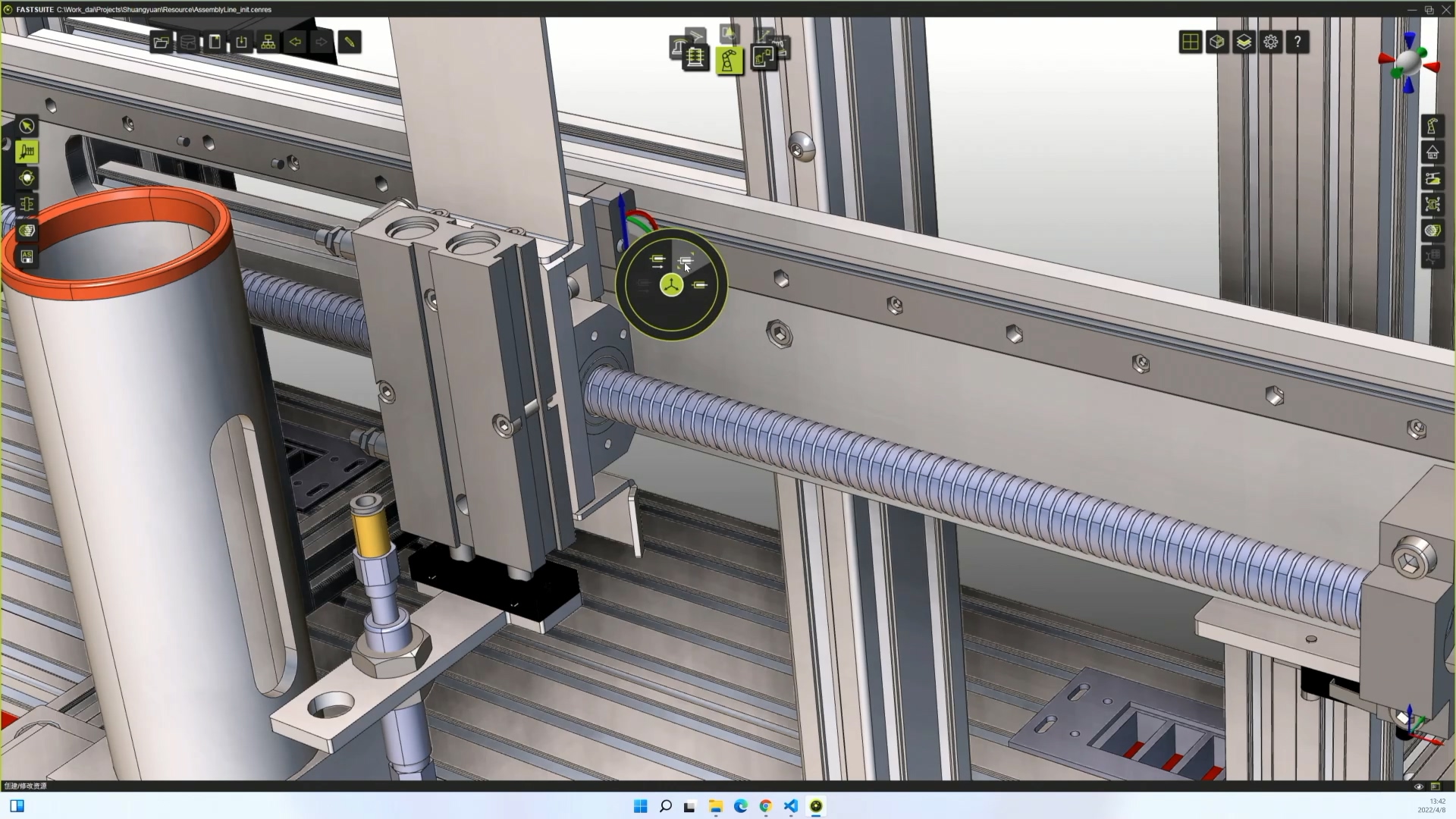
选择非联动轴
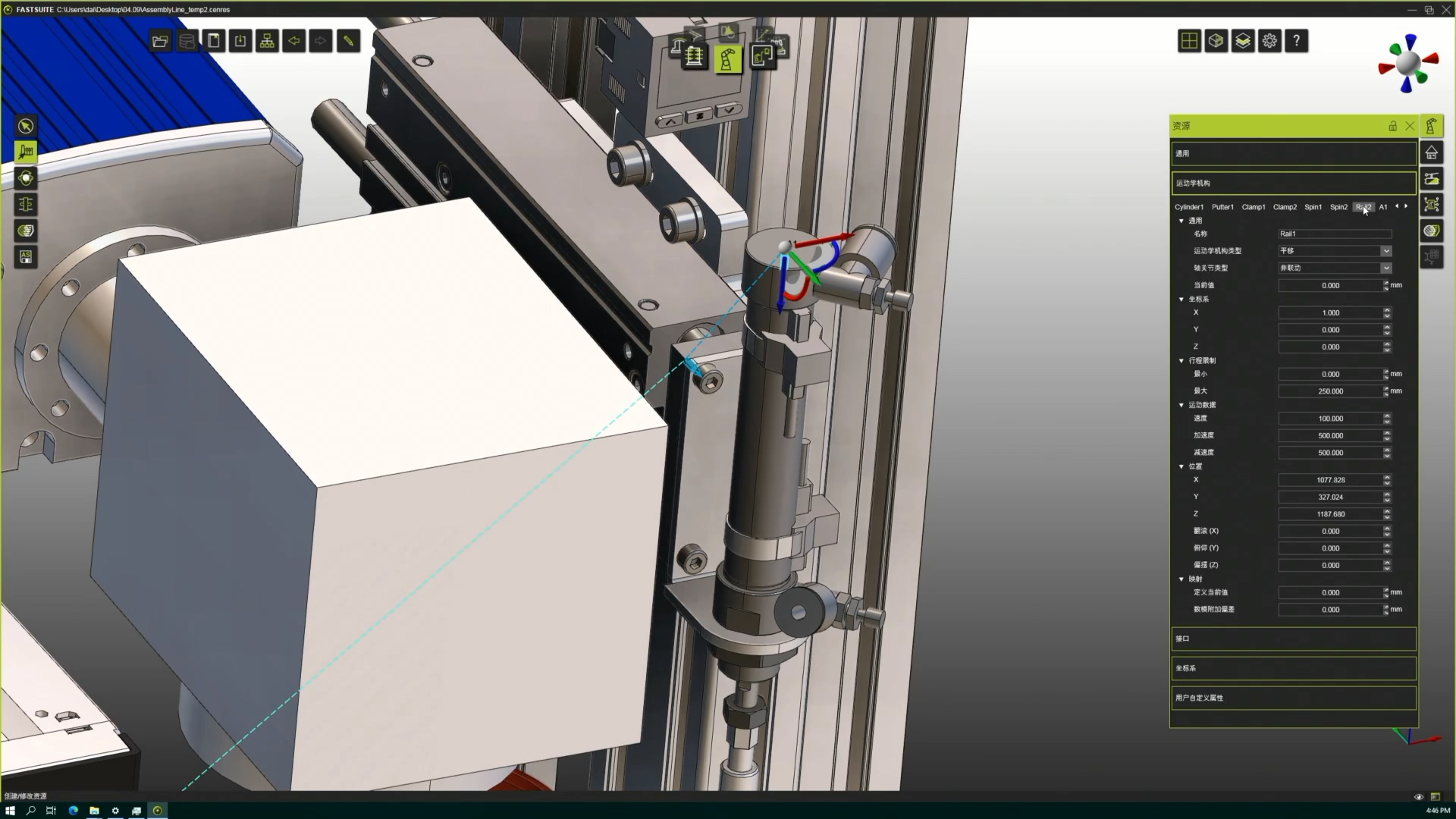
- 在运动轴建立完成后,需要设置运动轴行程限制。软件默认的平动轴行程非常长,为选择合理的行程范围,可以利用软件自带的测量工具测量资源的运动范围,或者从真实的设备描述中取得设备真实的运动行程从而建立更贴近实际的资源。单击右边工具栏中"资源"选项,点选二级菜单中的"运动学机构",在"行程限制"中填选数字。
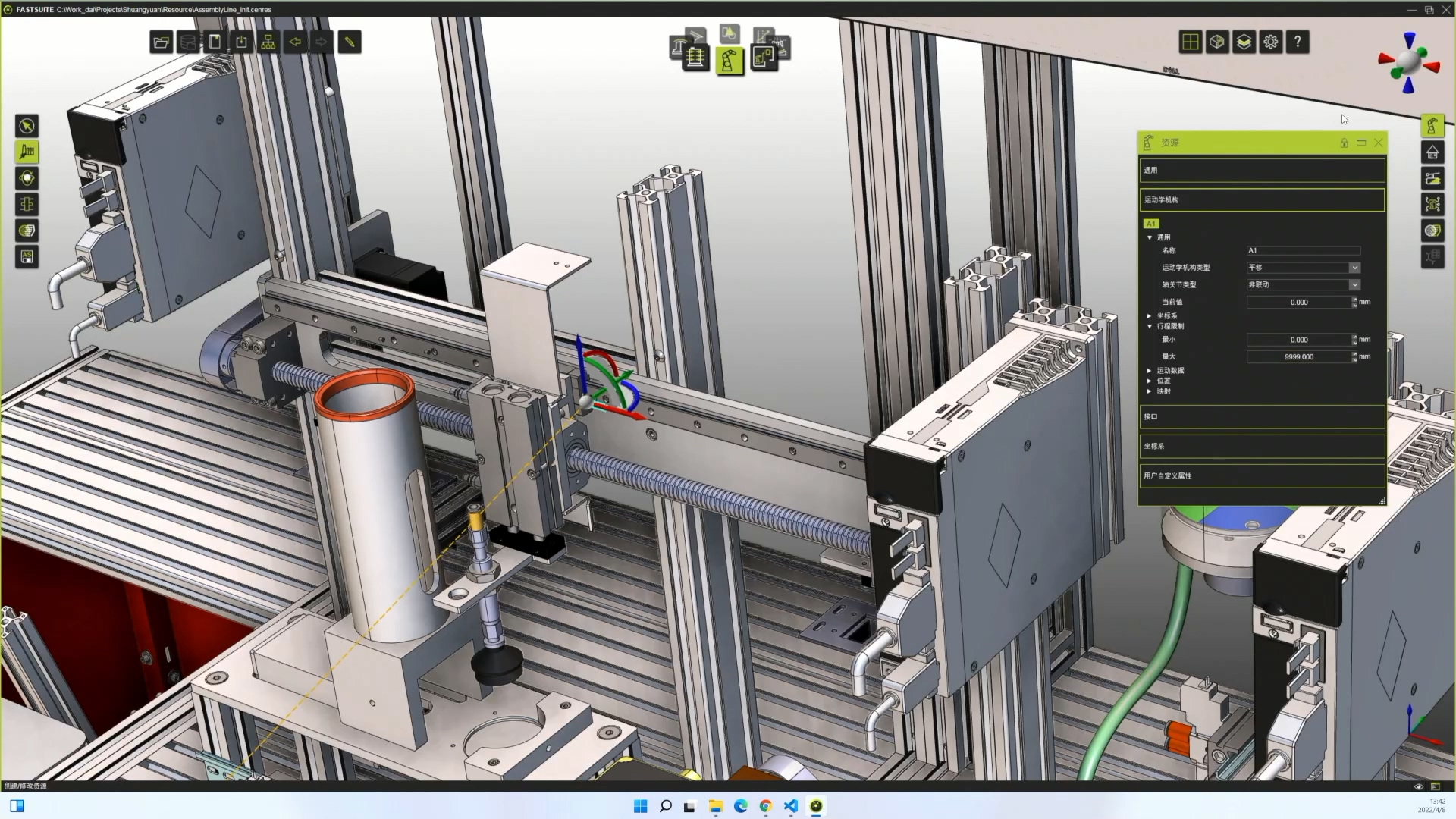
*资源选项栏中还可以修改资源的其他参数,如资源名称、类型、速度等,"接口"选项栏会在教程后半段使用。
- 创立完成合理的运动范围之后,需要将资源模型与运动轴关联。选取合理的运动模型,将其整体选中(按住Ctrl可以多选,或尝试鼠标双击所需选中的整体,软件会通过导入的模型组自动判断隶属一个整体的所有模型),并单击右键选择关联模型,点选刚才创建的运动轴。
- 此时导轨的运动模型建立完成,拖动运动轴会带动与之关联的运动模型,即导轨上与气缸轴相连的连接件。
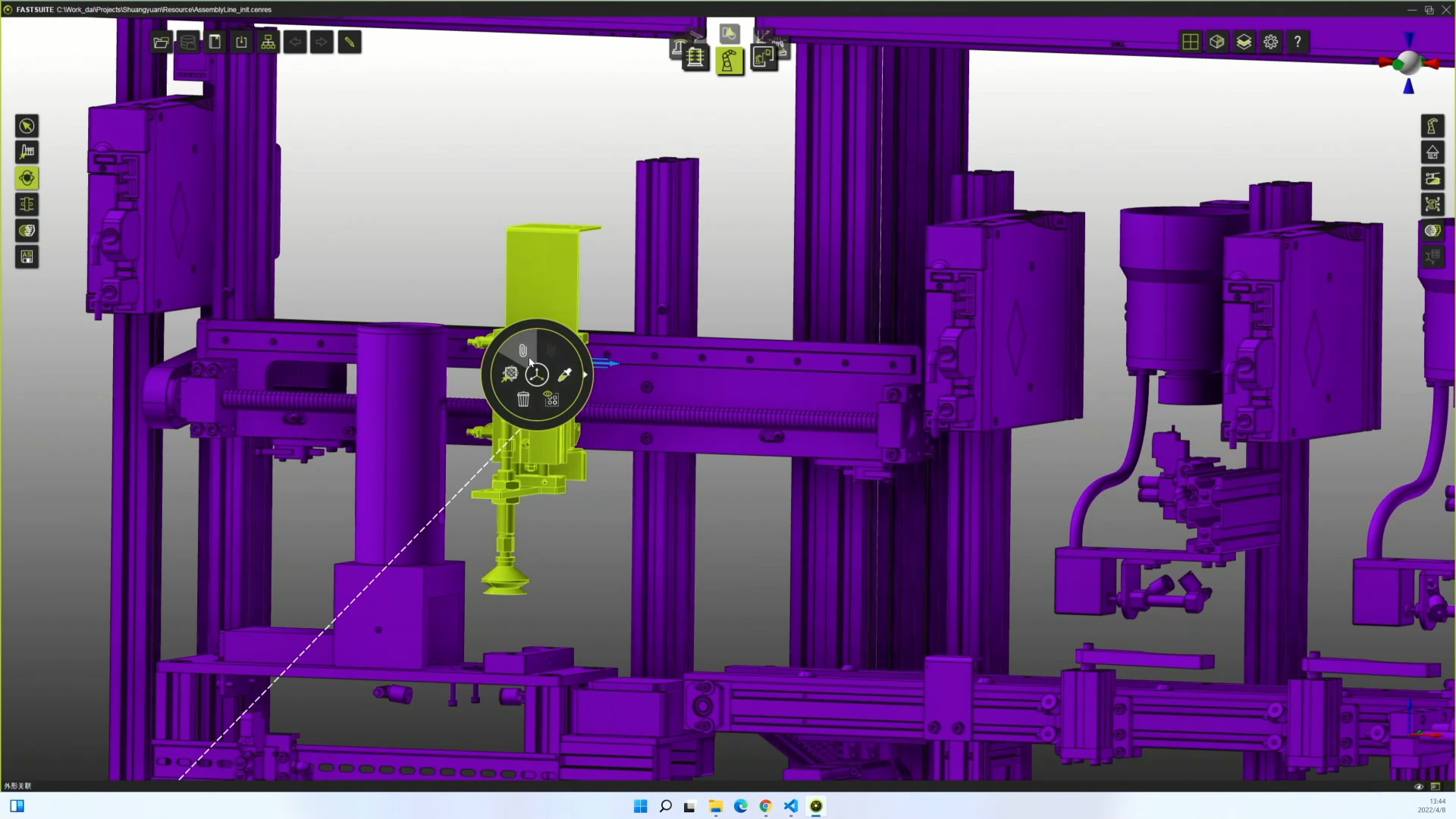
- 下面进行气缸运动轴的创建。首先将气缸带动运动的几何体几何关系去除:左键多选需要取消关联的几何体,右键单击选择取消关联选项;
- 
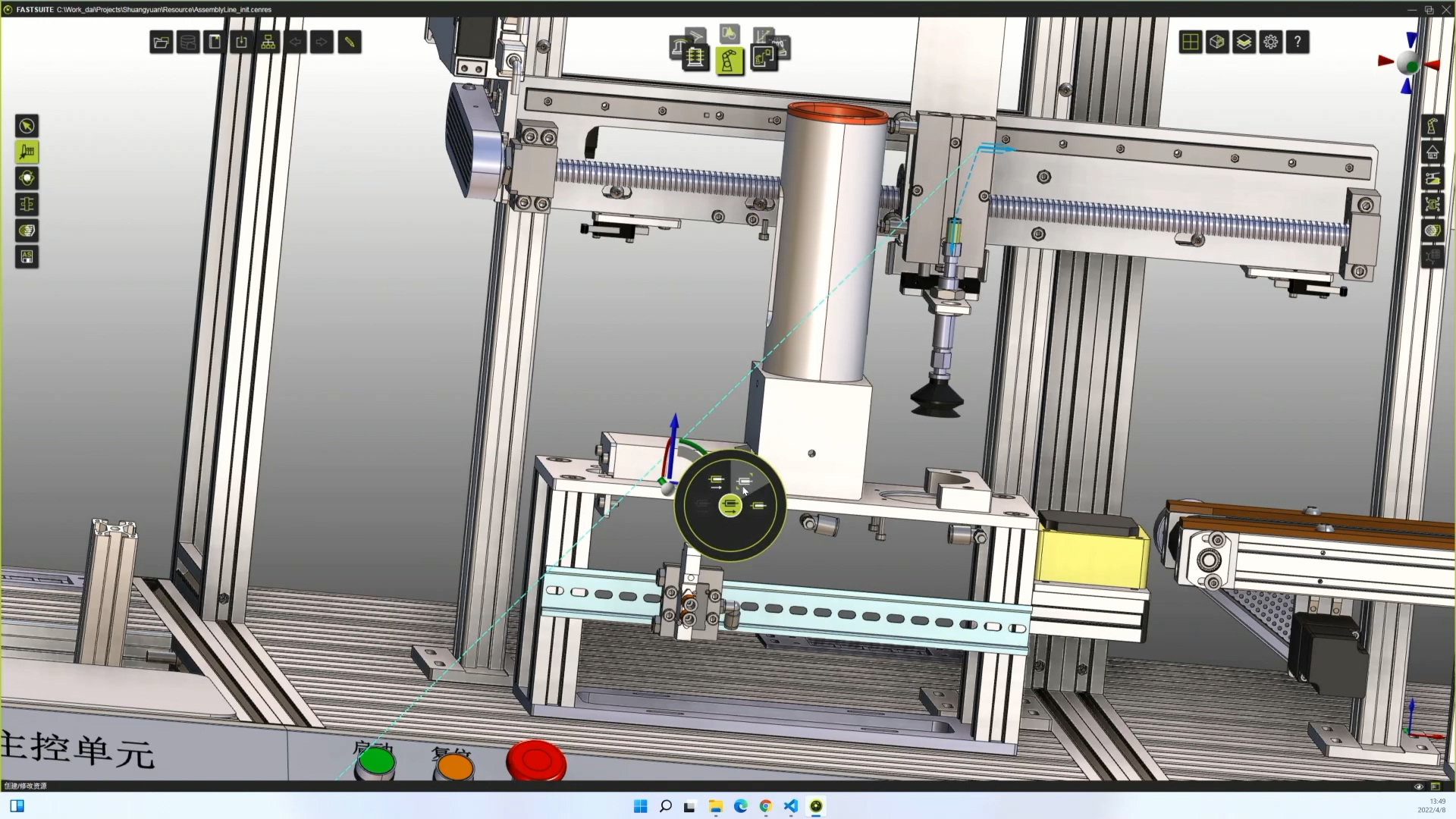
- 之后进行和上文中相仿的操作,选中左边工具栏中"创建/编辑资源"选项,将操作器粘贴至需要建立运动副的位置,并建立运动轴;
- 
将坐标系置于运动机构中心
- 
定义运动的正方向创建非联动轴
- 
将运动模型与运动轴关联
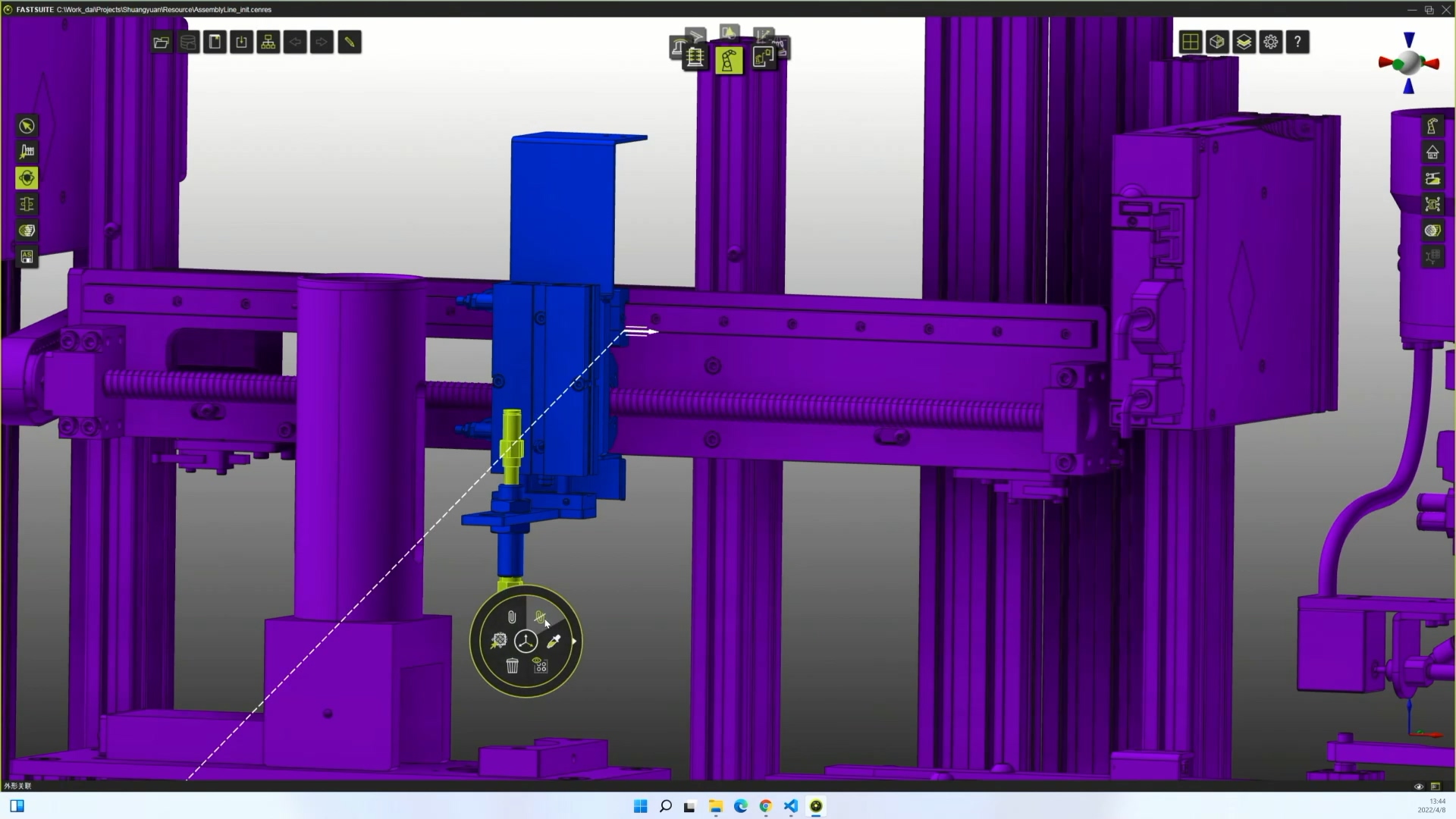
- 此时,建立的气缸运动轴与导轨所关联(软件会默认将前一个建立的坐标轴视为当前激活的关联轴),视频中有所展示如果没有激活正确的运动轴,将会对独立运动的关节轴有错误的定义。接下来示范如何正确建立独立运动的关节轴:
- 首先选择资源的运动坐标系(非选中坐标轴处的菱形几何体,其代表的是资源的基坐标),并单击右键,在点选菜单中选择"设为活跃状态的轴关节/坐标系":
*如果要选择非基坐标的其他运动副,需要在"创建/编辑资源"选项卡下鼠标至于运动副之上,待其显示高亮后点击鼠标右键,即可对非基坐标的运动副进行编辑。
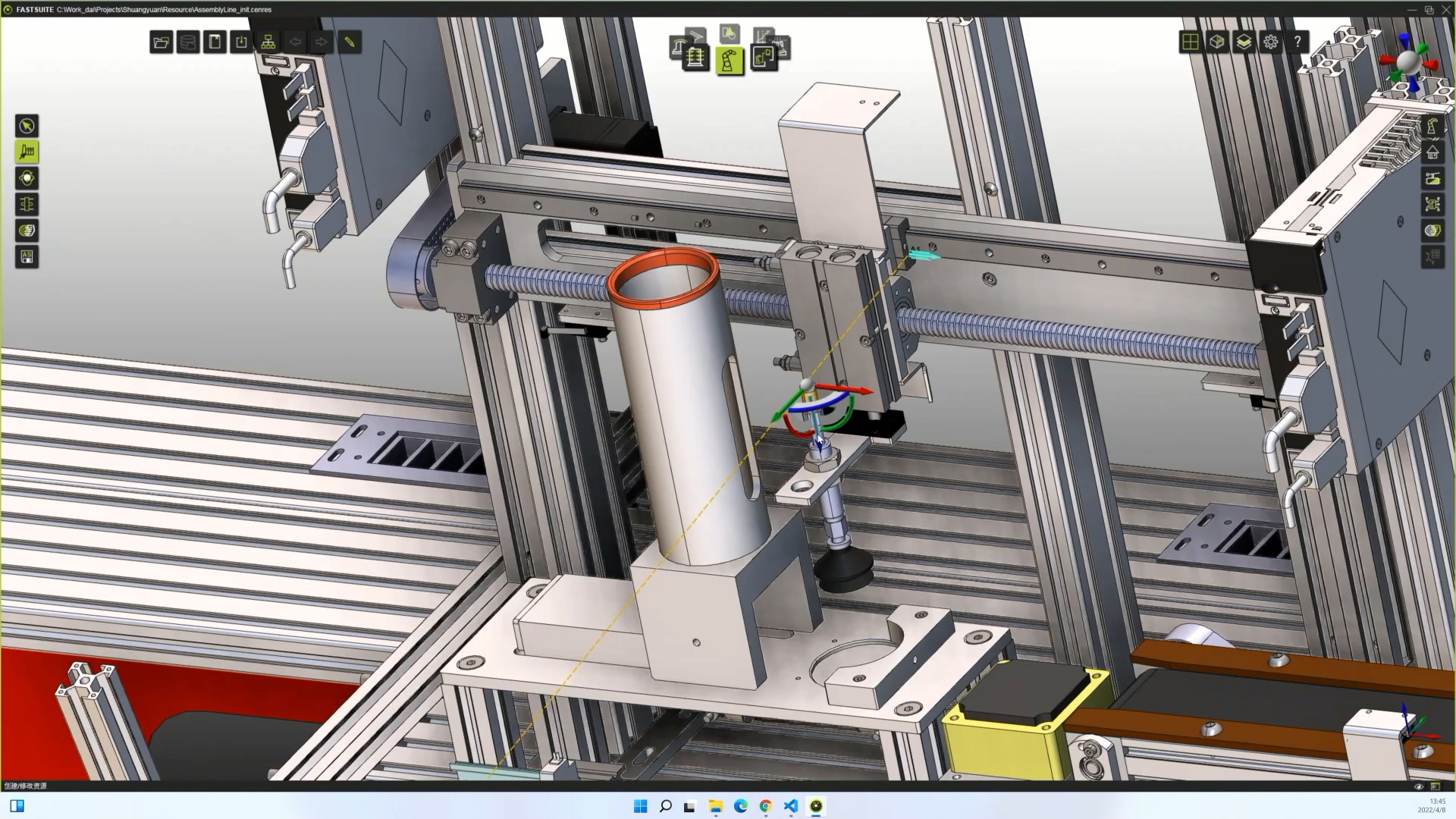
- 按照上文中的步骤,在推杆处创建平移运动轴。在这一步中需要注意推杆自身的运动范围,从推杆限位机构到其运动轴终点限位,可以通过测量工具寻找近似的运动行程。
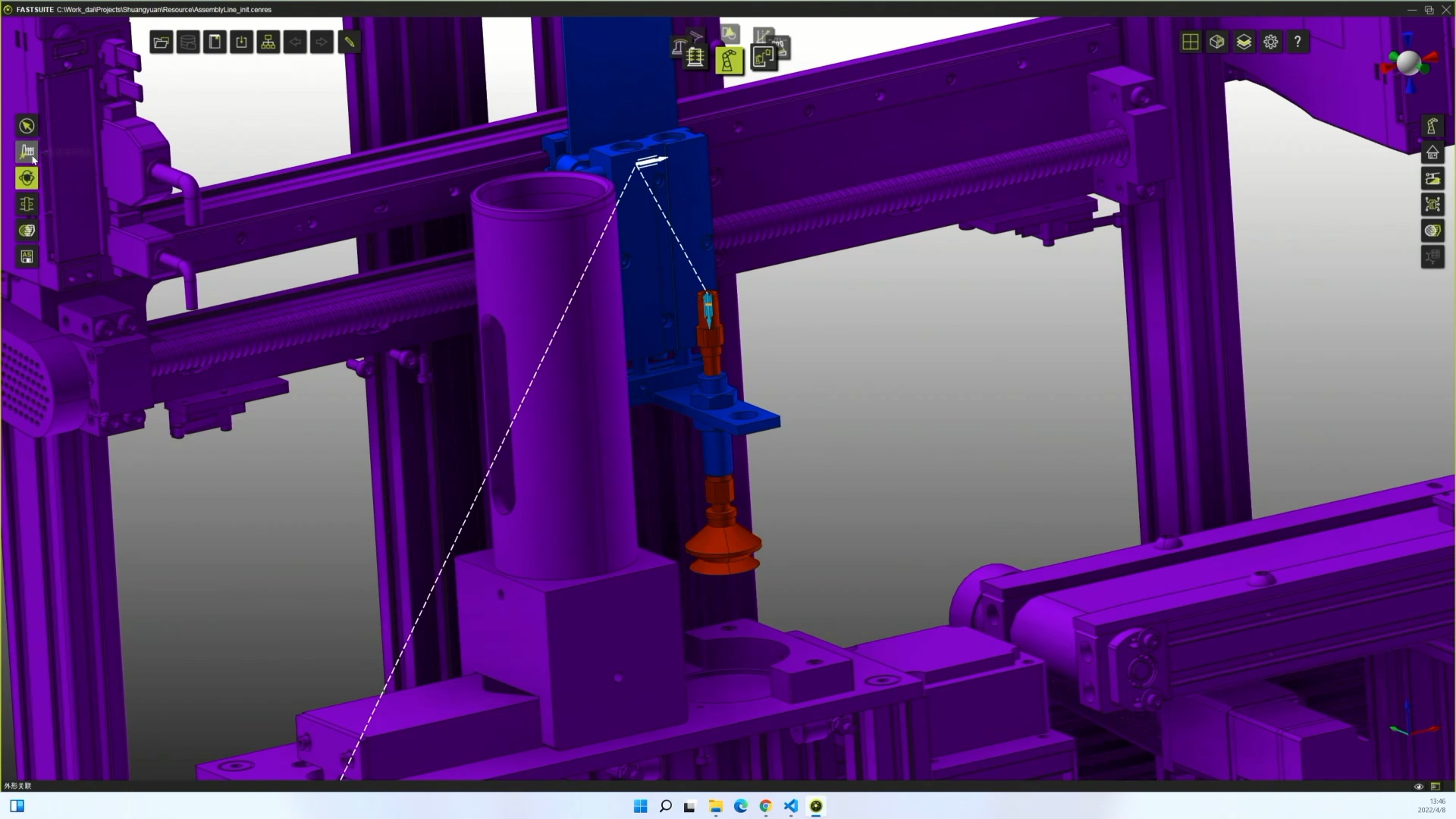
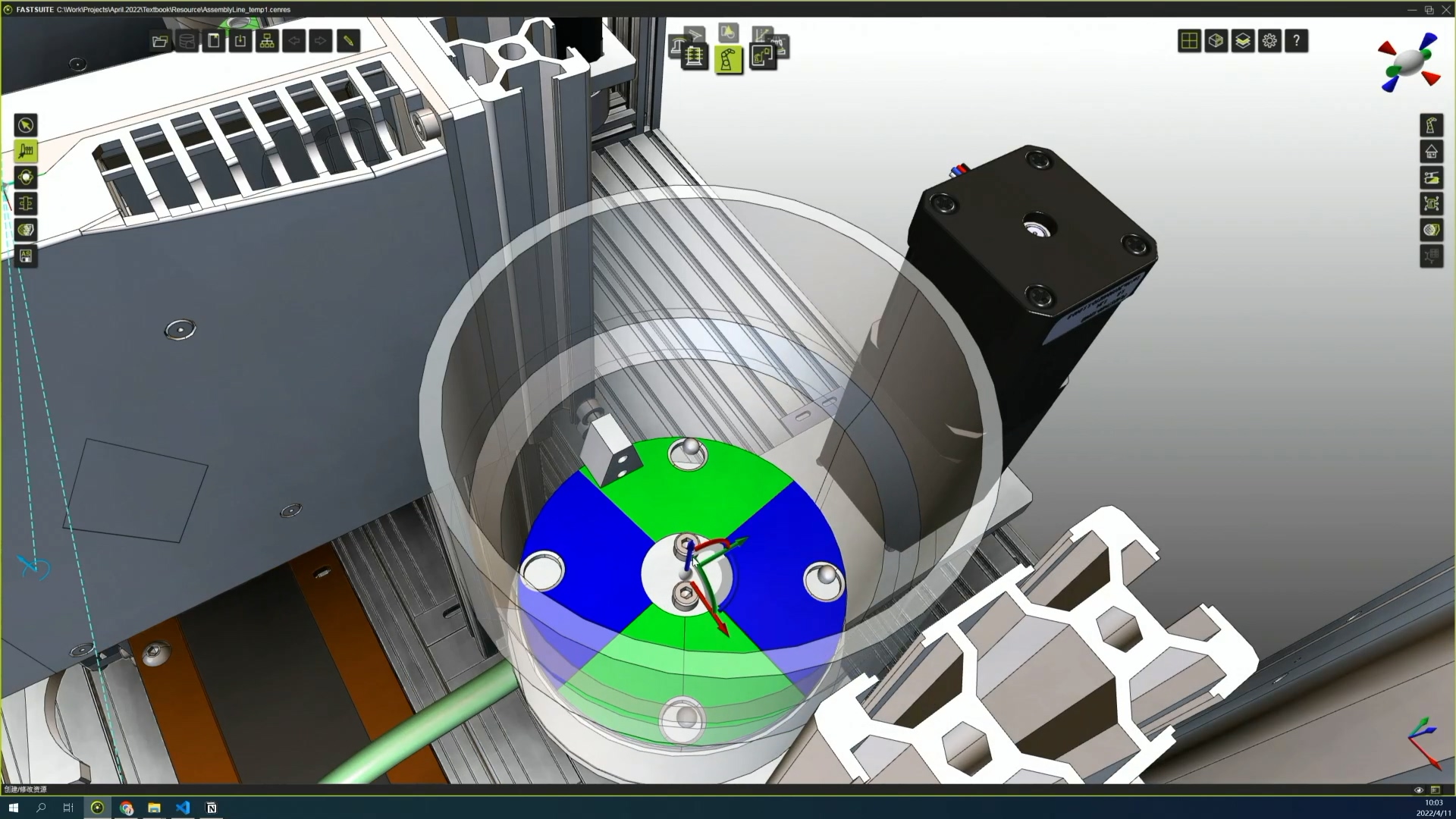
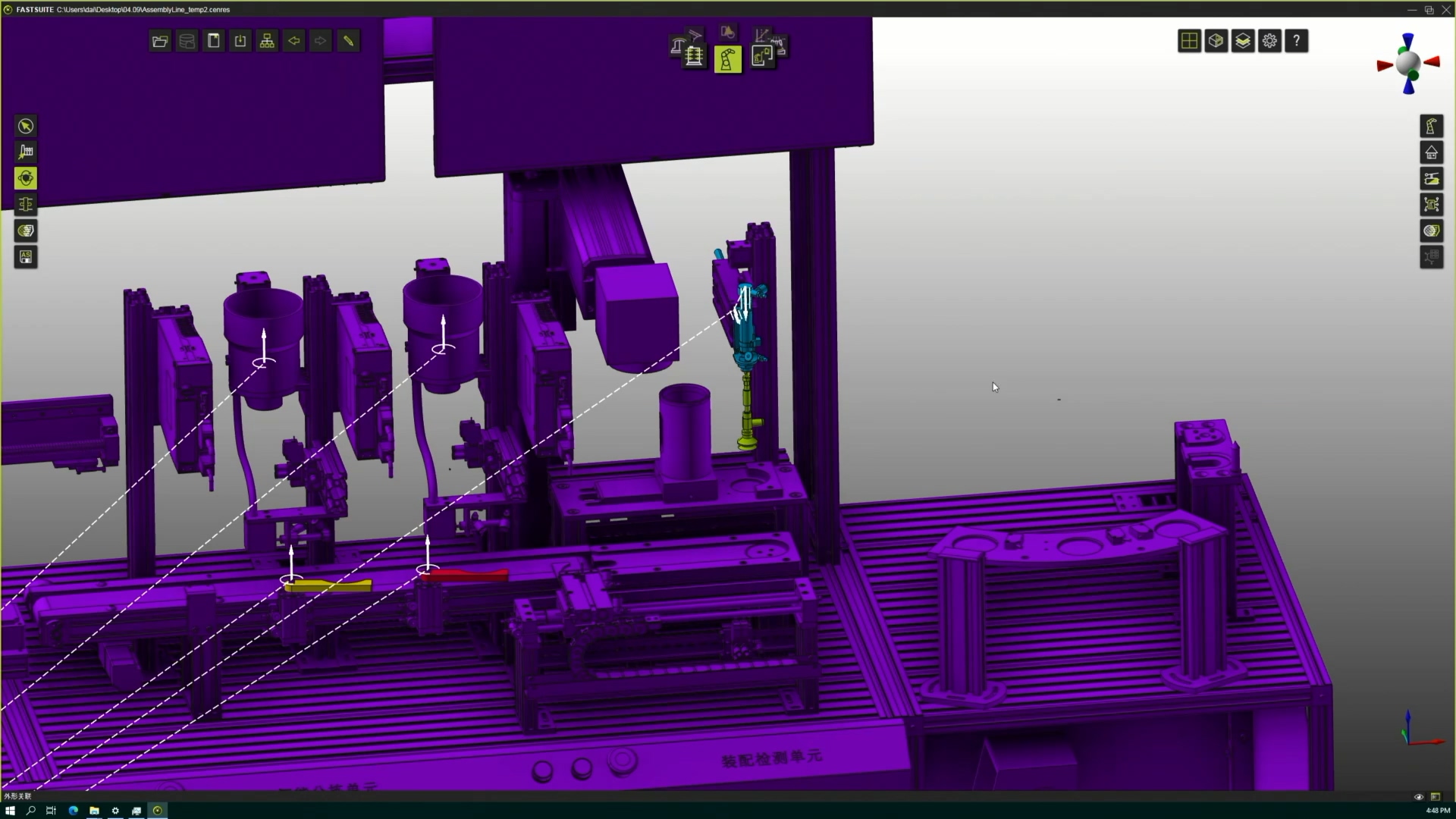
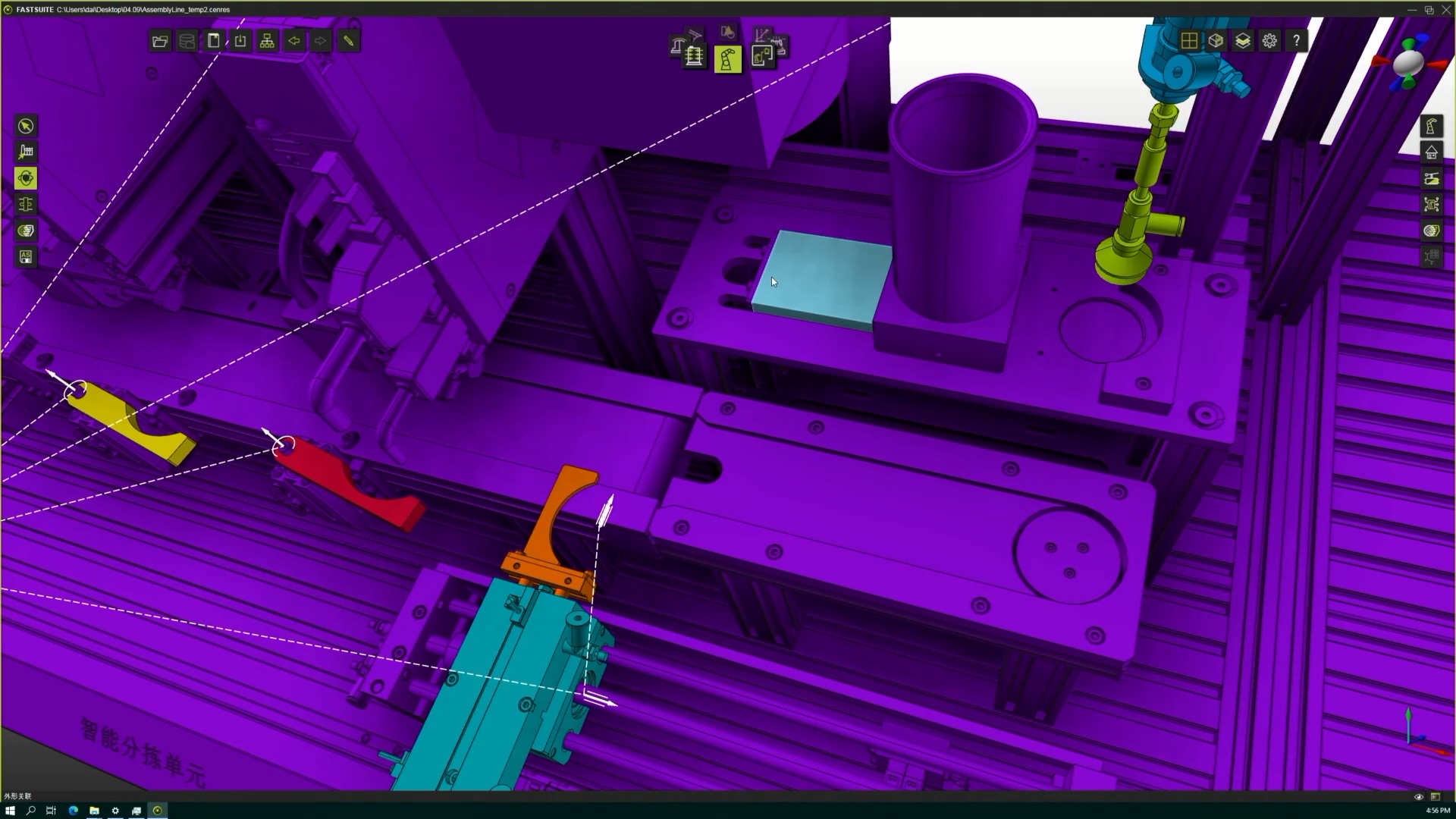
- 关联运动模型之后,本工站共有三个运动关节,如图所示
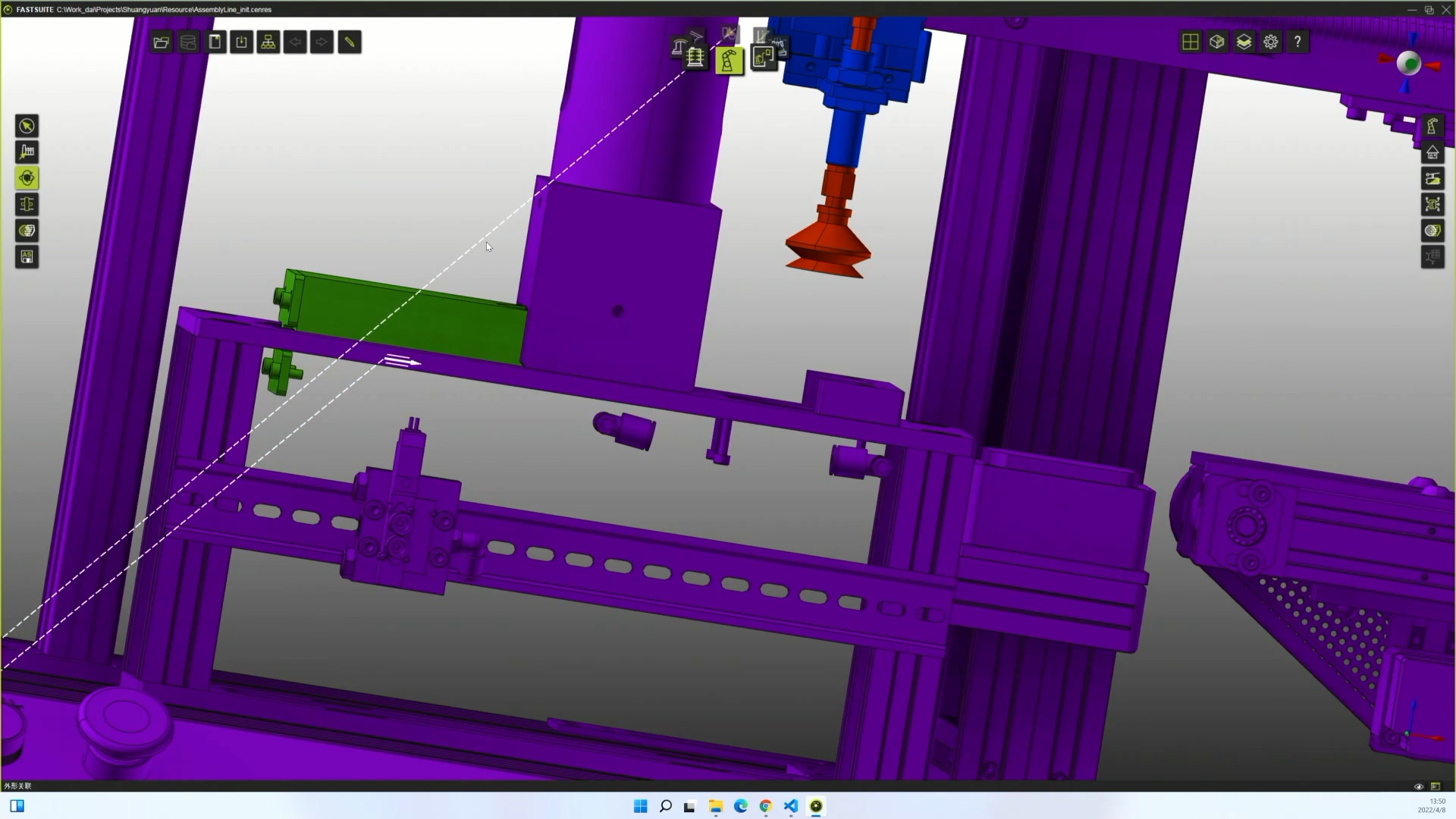
- 在正确定义所有运动轴之后,设置完成。推杆(上图绿色部分)为独立运动,不与导轨或气缸关联;气缸(上图红色部分)与导轨(上图蓝色部分)关联,为导轨的联动部分。
上文所建立的资源文件:AssemblyLine_temp1.cenres
### 二、卡钳、旋转轴的建立
主要内容:
- 建立场景中的卡钳和旋转轴运动学资源;
- 在"创建资源"场景中,选择左侧选项卡的"外形关联"选项,鼠标点选两个导轨上的卡钳,右键呼叫外形菜单并点击取消几何体关联,从而取消卡钳和原资源的关联;
- 
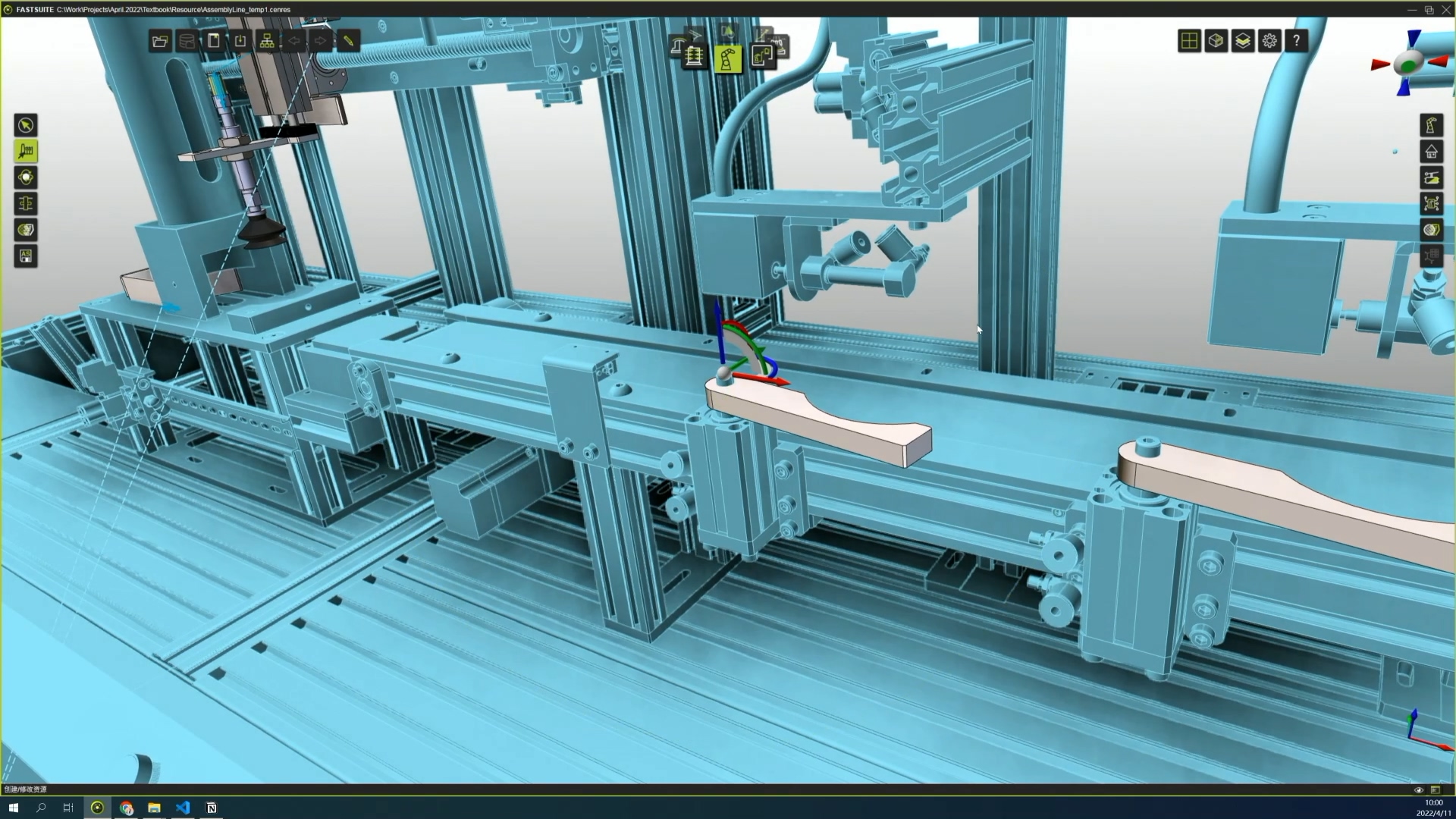
- 在左侧工具栏选择"创建/编辑资源",将操作坐标系置于卡钳的旋转中心。
- 
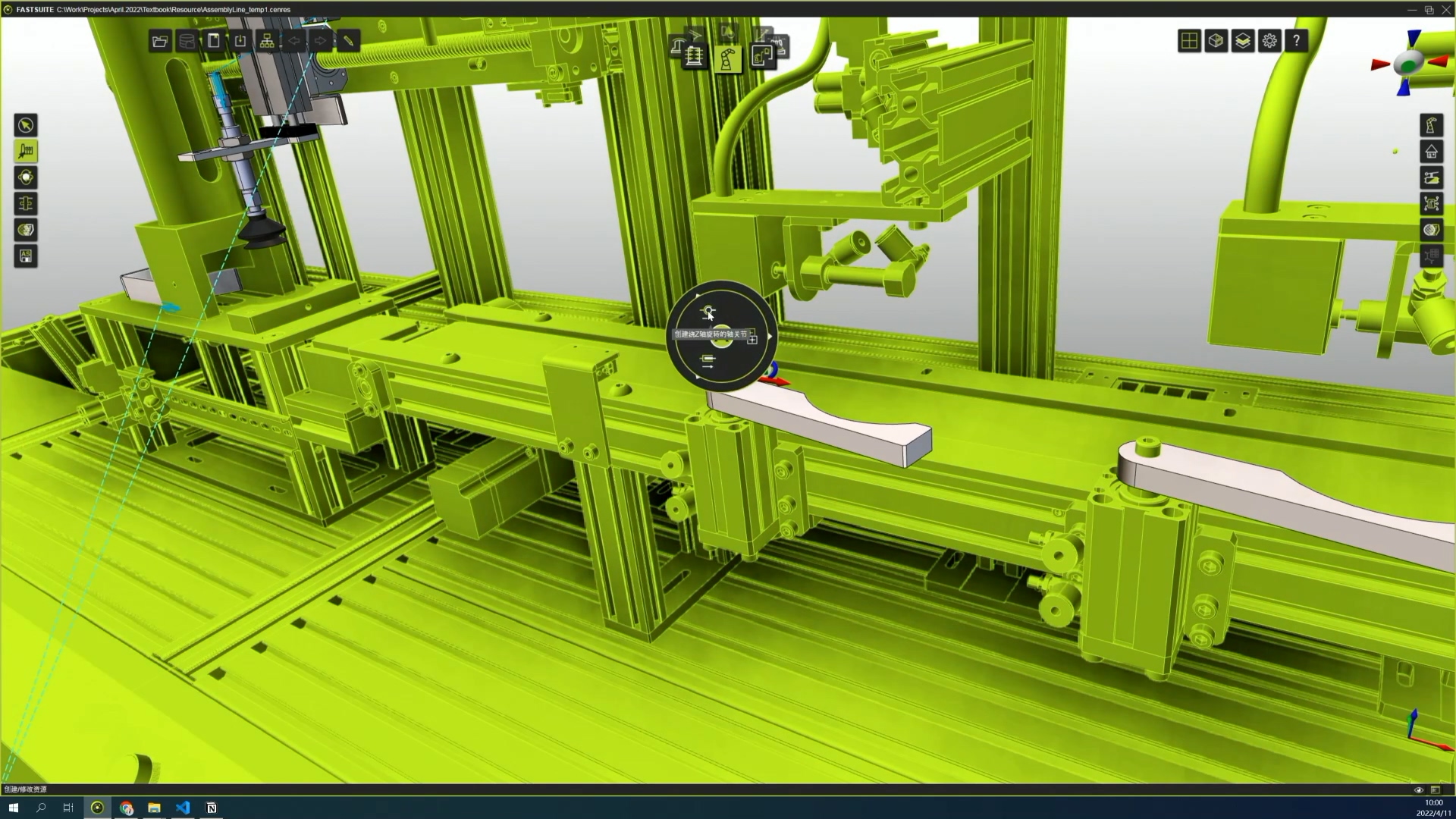
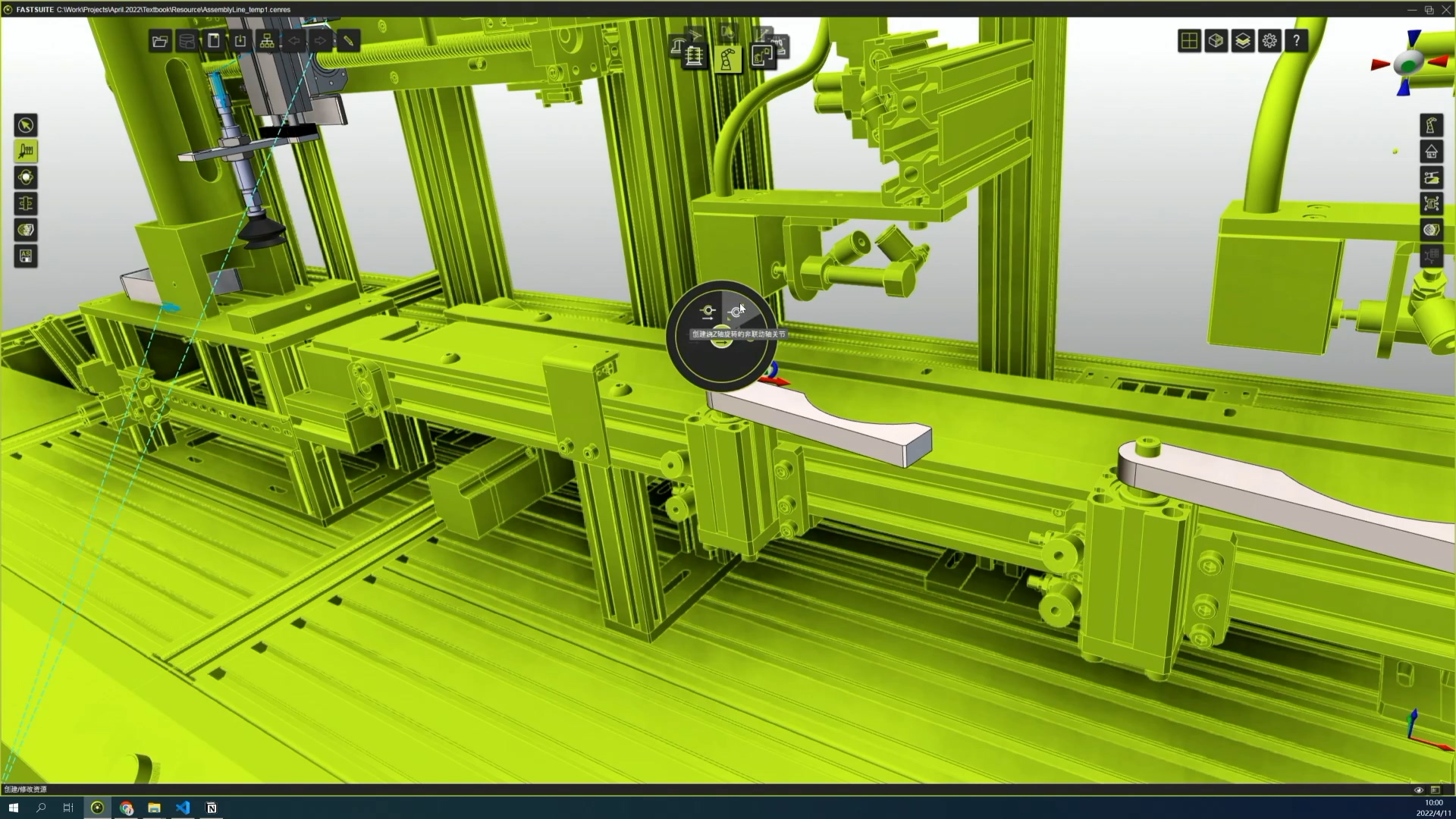
- 鼠标右键单击坐标系的Z轴,选择"建立旋转运动轴"-"非联动轴关节"
- 
- 
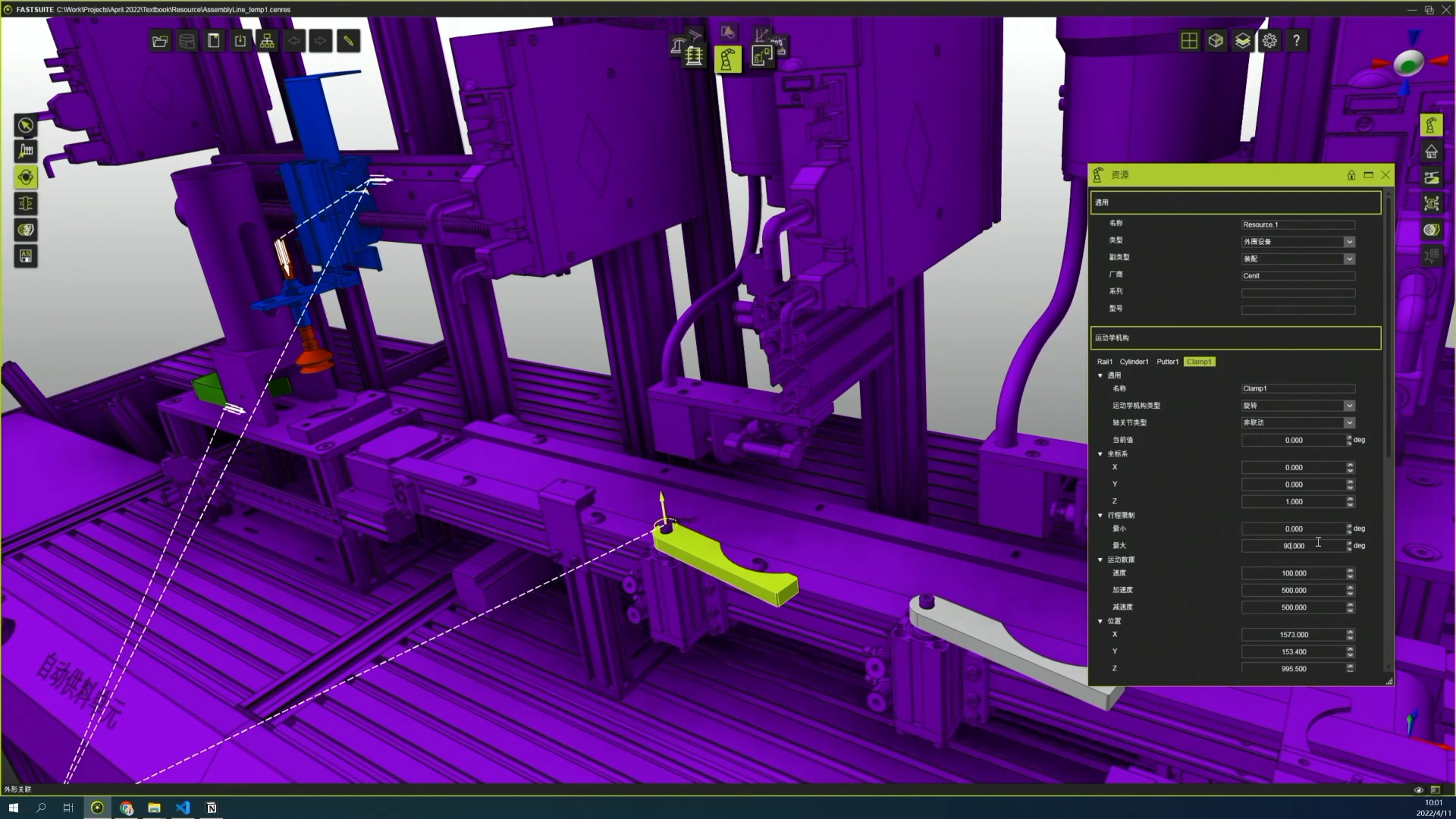
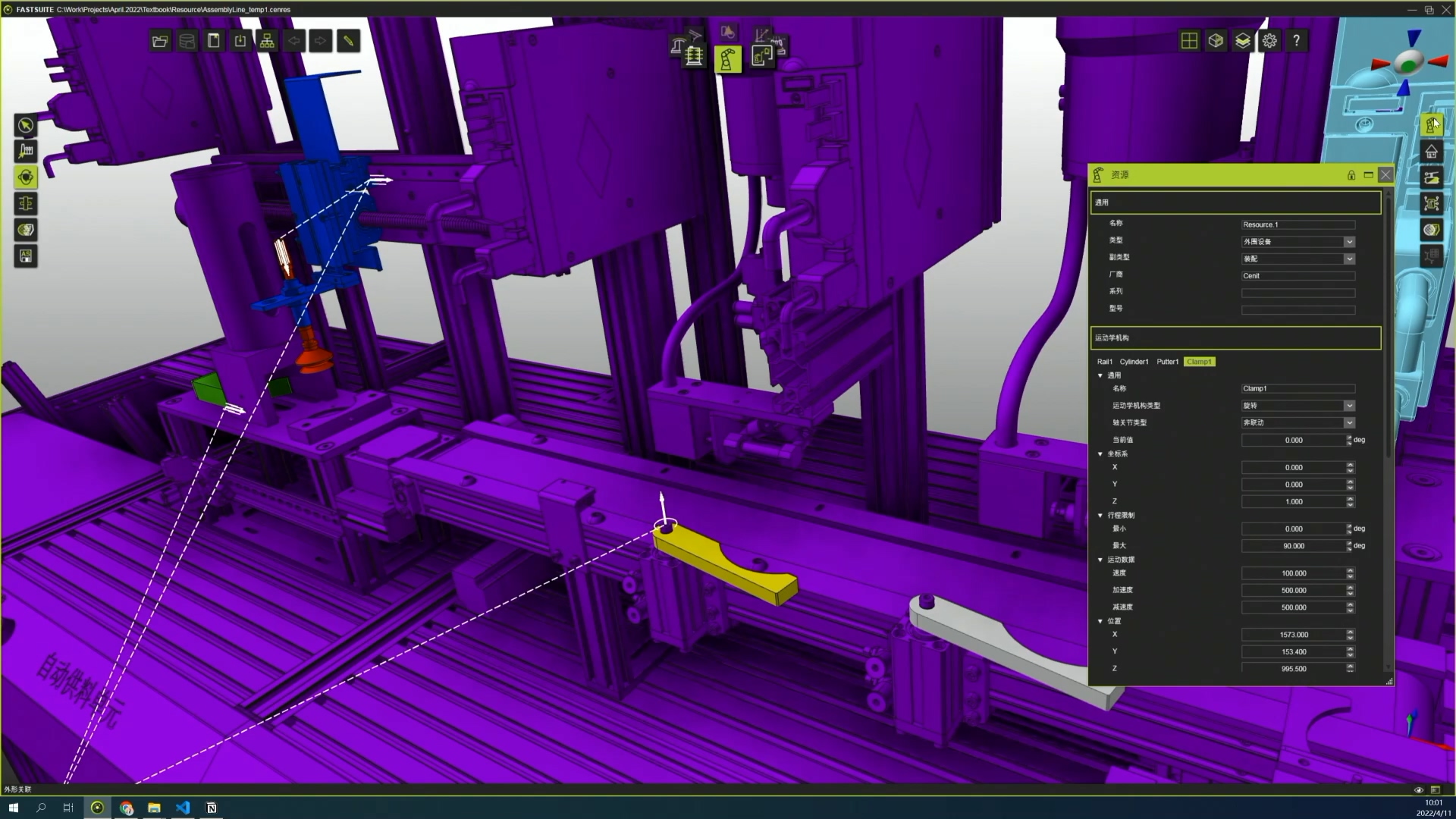
- 运动关机建立完成后,需要设置卡钳的运动行程(在数学上,规定顺时针旋转的角为负角,逆时针旋转的角为正角),在资源中卡钳需要90°运动,从而起到阻挡传送带上物体的作用。运动行程也可以经过测量和通过在软件中输入数值观看效果进行尝试来确定。
- 
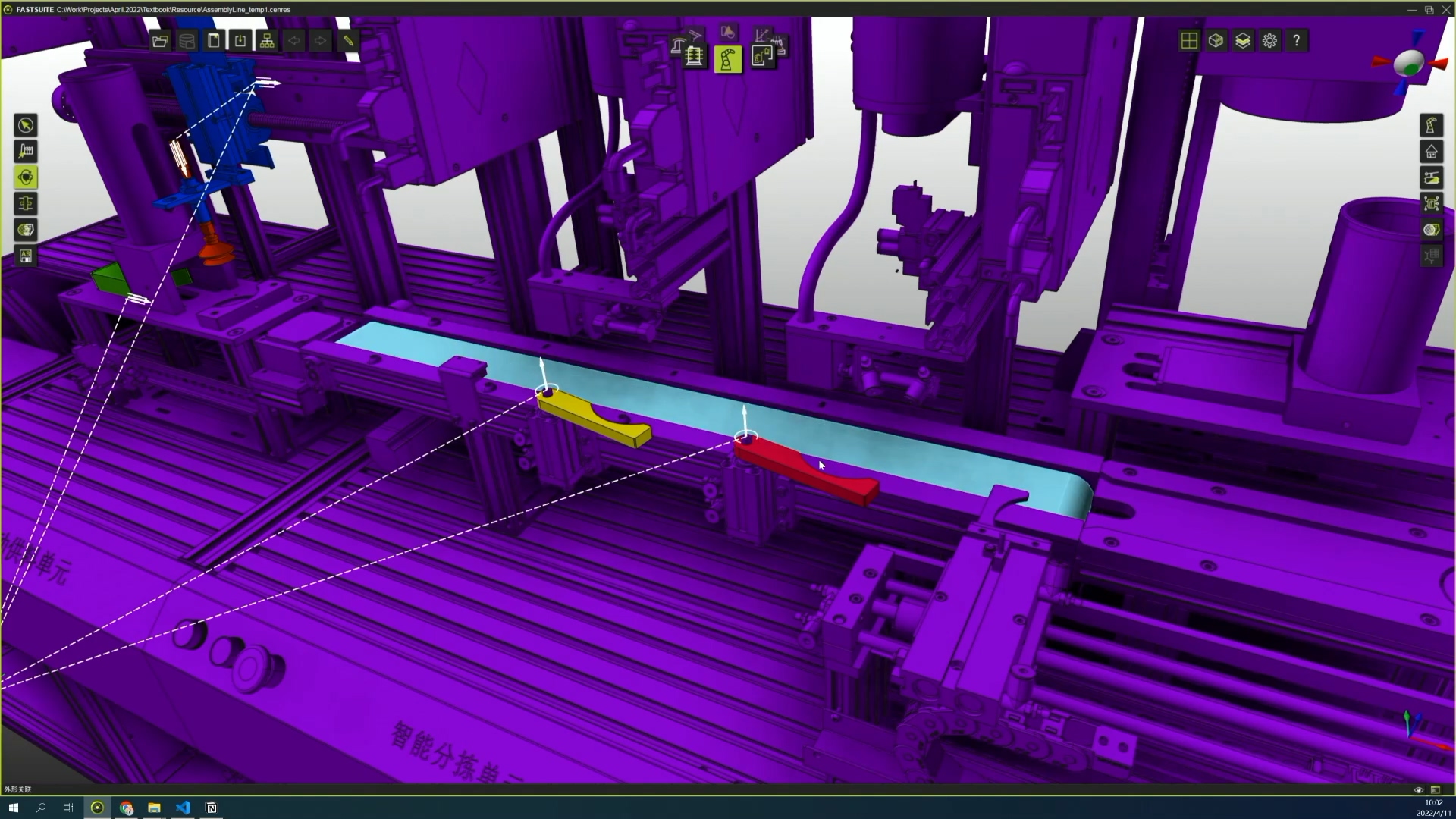
- 建立完整的旋转运动副之后,需要将卡钳几何模型与旋转轴关联。注意思考此时激活的关联轴应当为哪一个,并思考在第二个卡钳的运动轴建立时应当如何选取。
- 
- 如法炮制,创造第二个旋转轴(注意当前激活的关联轴,需要思考并选择正确的关联轴;视频中有相应展示),行程设置与第一个相仿。
- 
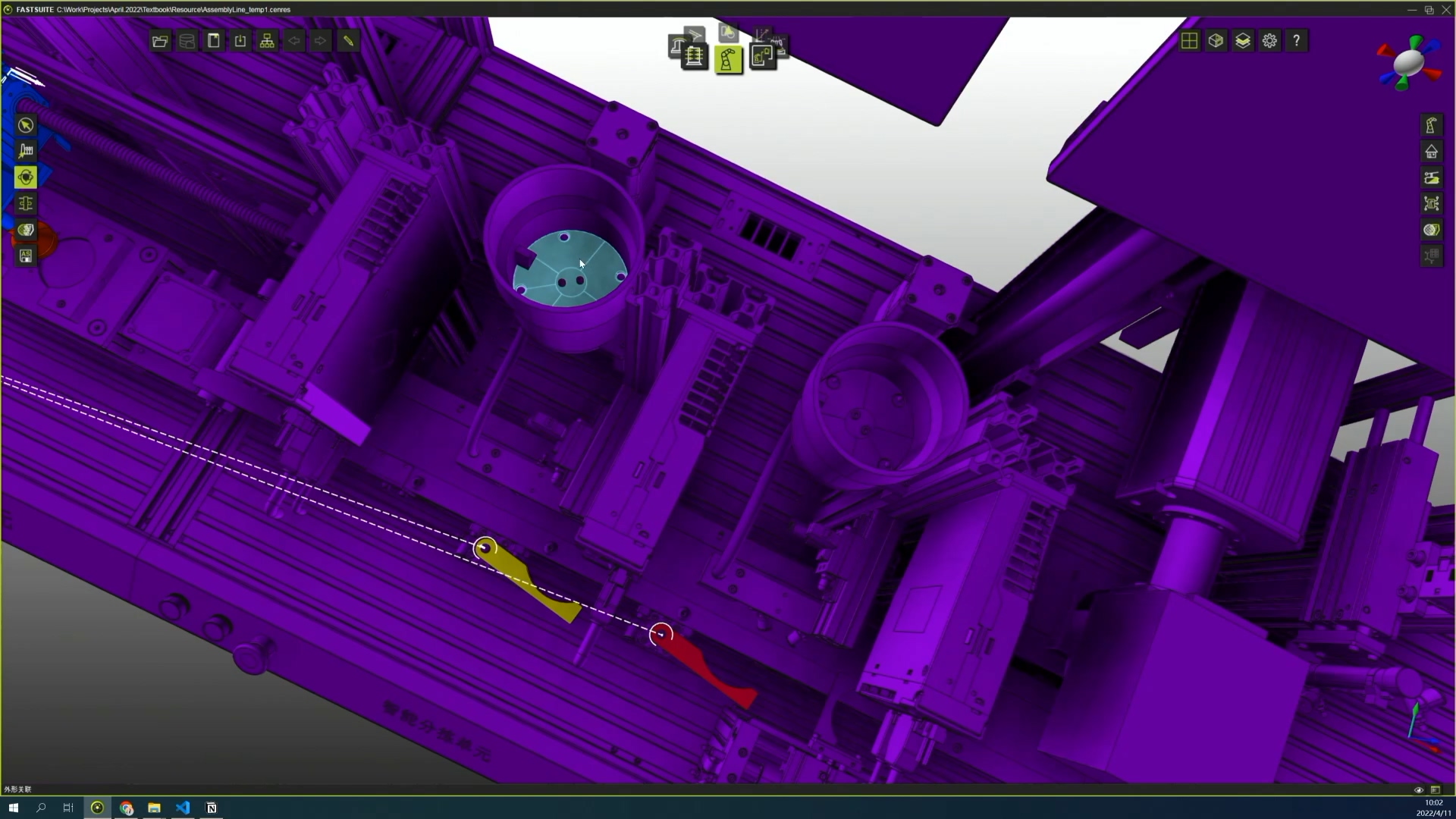
- 至此,卡钳的运动轴建立完成。卡钳的运动轴不在其几何中心,下面演示如何创建一个旋转轴位于图形几何中心的运动轴。
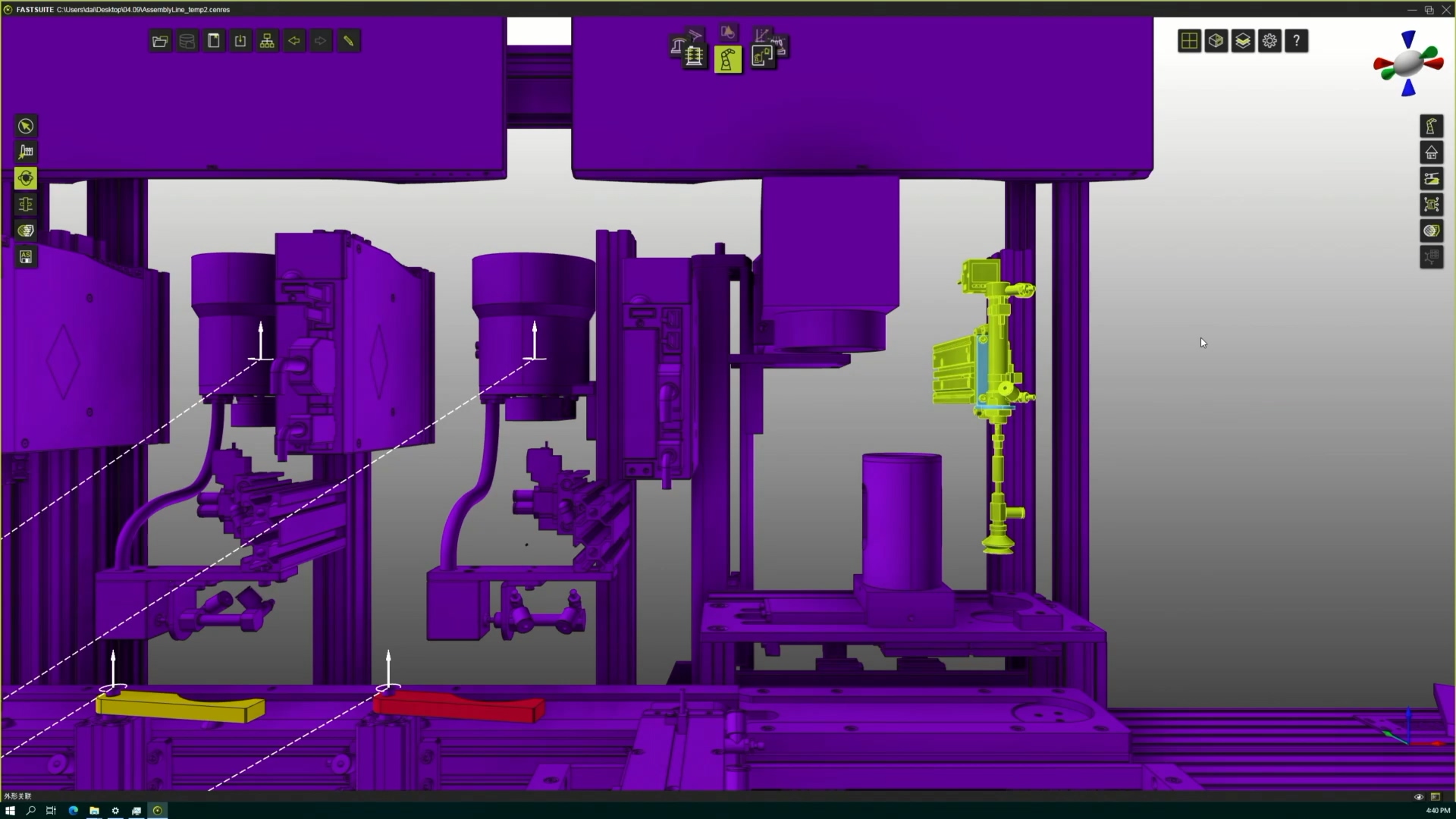
- 接下来需要在填料区建立一个中心旋转机构的运动轴,其步骤与上述旋转机构的建立大致相仿,只需要注意激活的关联轴与运动轴建立的具体位置即可。按照相同步骤建立填料区旋转轴,如图所示
- 
- 
- 
上文所建立的资源文件:AssemblyLine_temp2.cenres
### 三、建立剩余的推杆、气缸装置与机器人夹爪
主要内容:建立推杆、气缸,以及机器人夹爪资源;
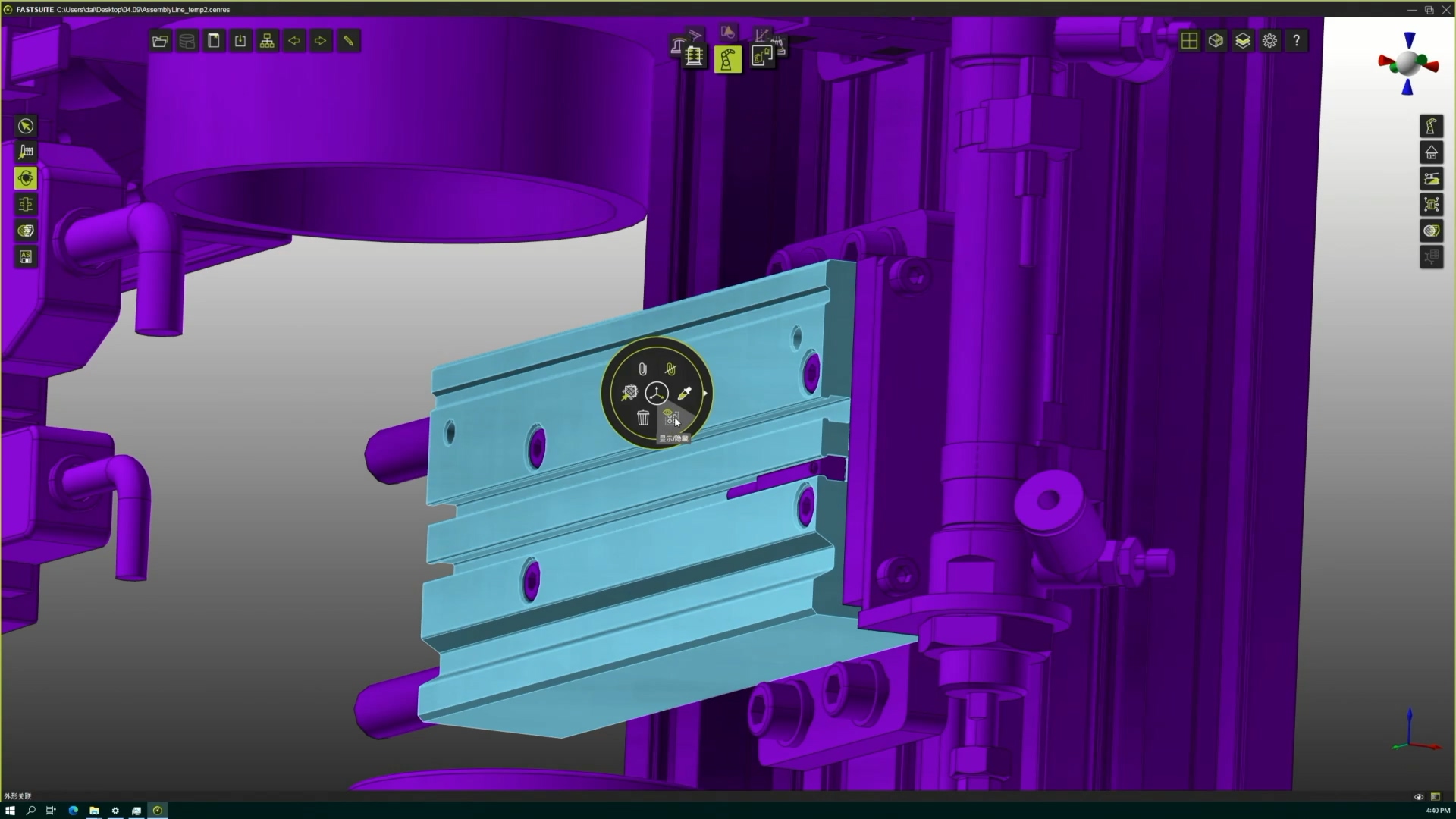
- 在"创建资源"场景中,选择左侧选项卡的"外形关联"选项,鼠标点选导轨与其上关联的气缸,右键呼叫外形菜单并点击取消几何体关联:
- 
- 请思考在这个机构中建立机构的顺序:先建立导轨或是先建立气缸
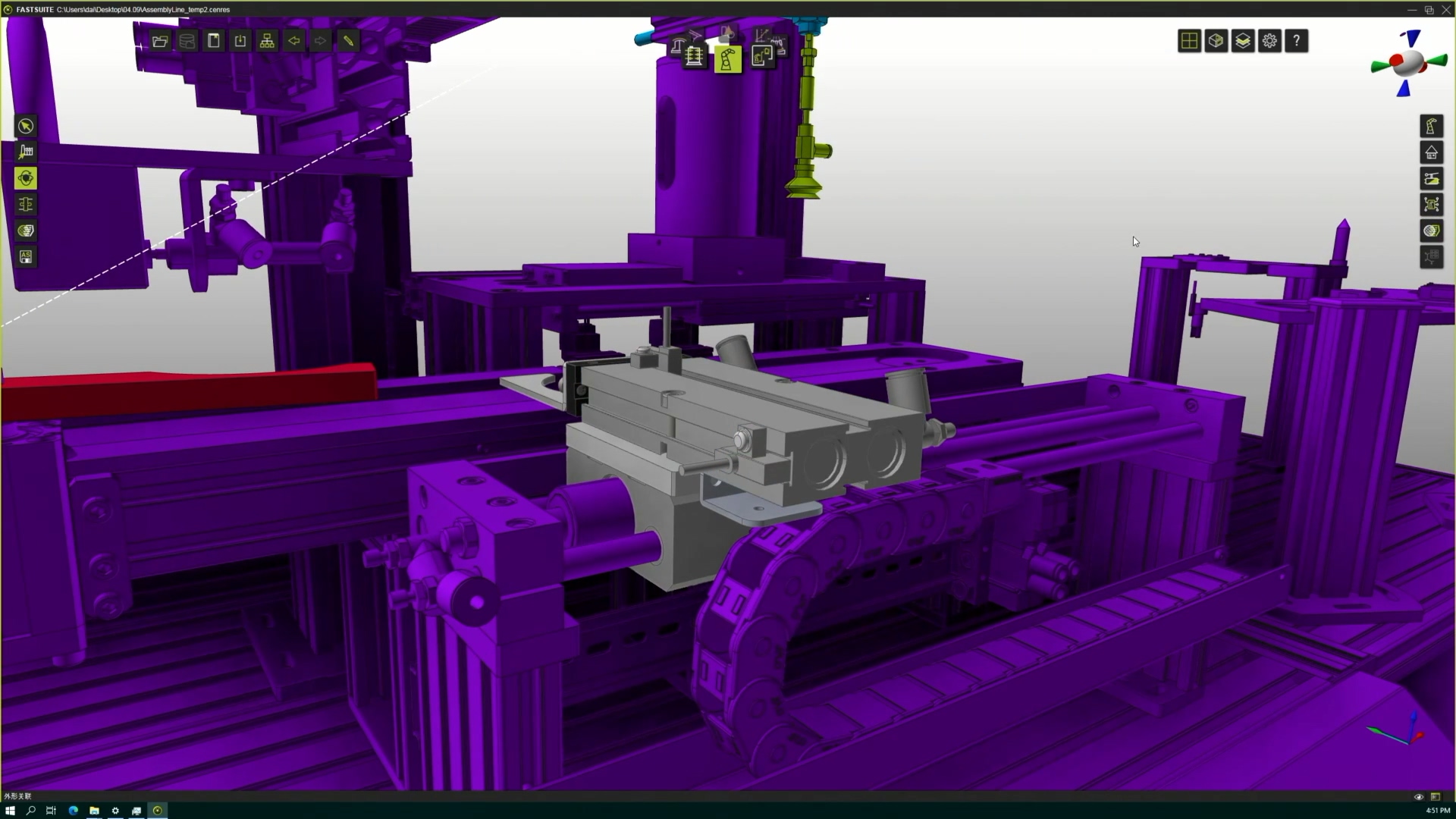
- 使用`隐藏`功能将外部几何体隐藏,之后可以选择内部结构,建立内部运动机构:
- 
- 利用操作坐标系,测量气缸中心与放置杯子位置的距离
- 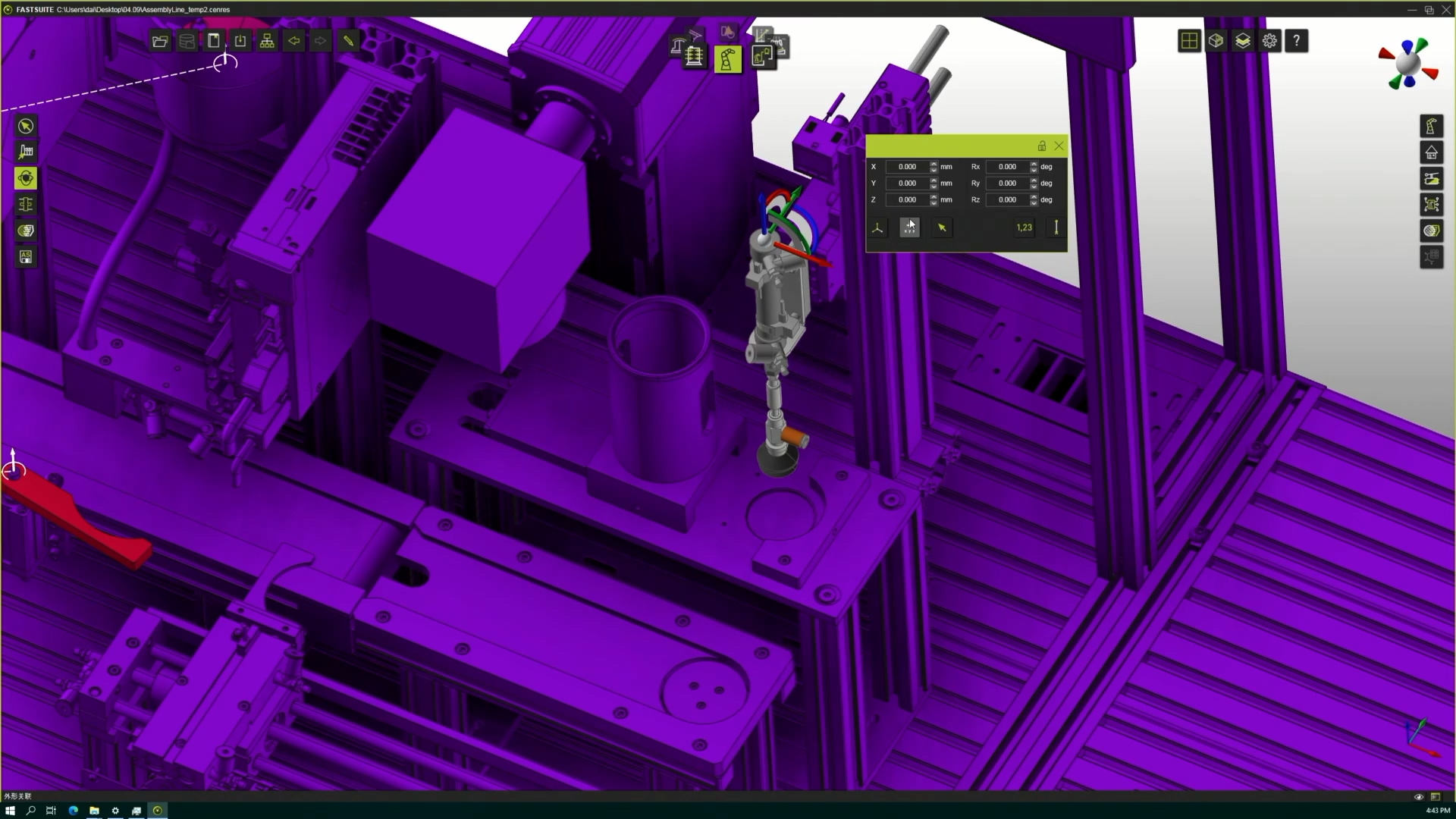
- 
- 使用相同的技巧,用以测量气缸至传送带的距离,为气缸定义的距离比其实际运动距离更长,在之后的编程章节将会详细讲到。
- 
- 正确建立的导轨+气缸:
- 
- 取消推杆与导轨的几何体关联
- 
- 与上文技巧类似,建立导轨、推杆的运动坐标系:
- 
- 与[第一章](#一导轨气缸与推杆的运动学建立)中描述相同,建立本站最后一个运动机构(鼠标下高亮单位):
- 
最后建立的资源文件:AssemblyLine_temp3.cenres
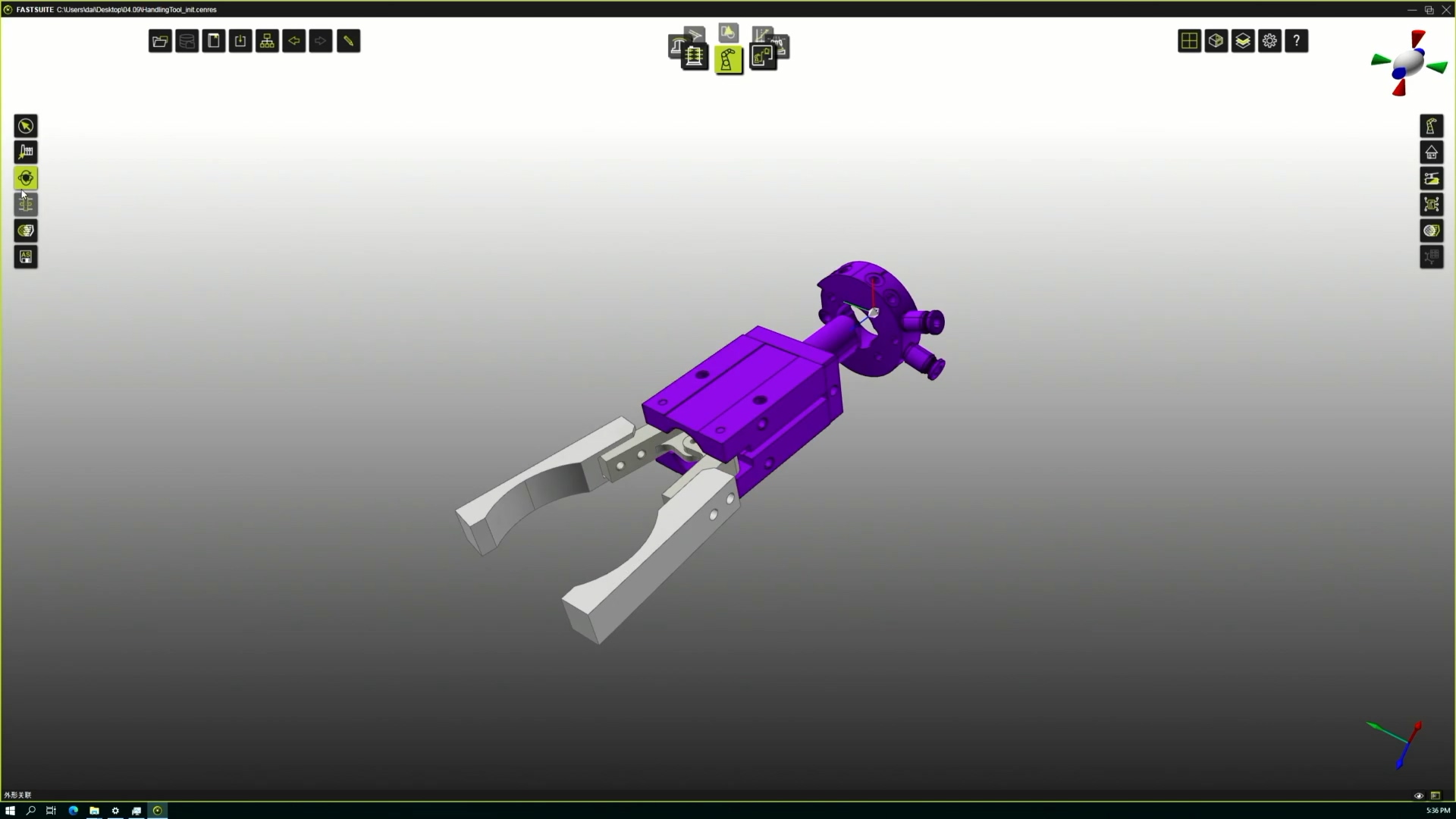
- 在"创建资源"场景中,选择左侧选项卡的"外形关联"选项,鼠标点选机器人夹爪,右键呼叫外形菜单并点击取消几何体关联,注意善用隐藏功能,易于选择夹爪内部机构。
- 
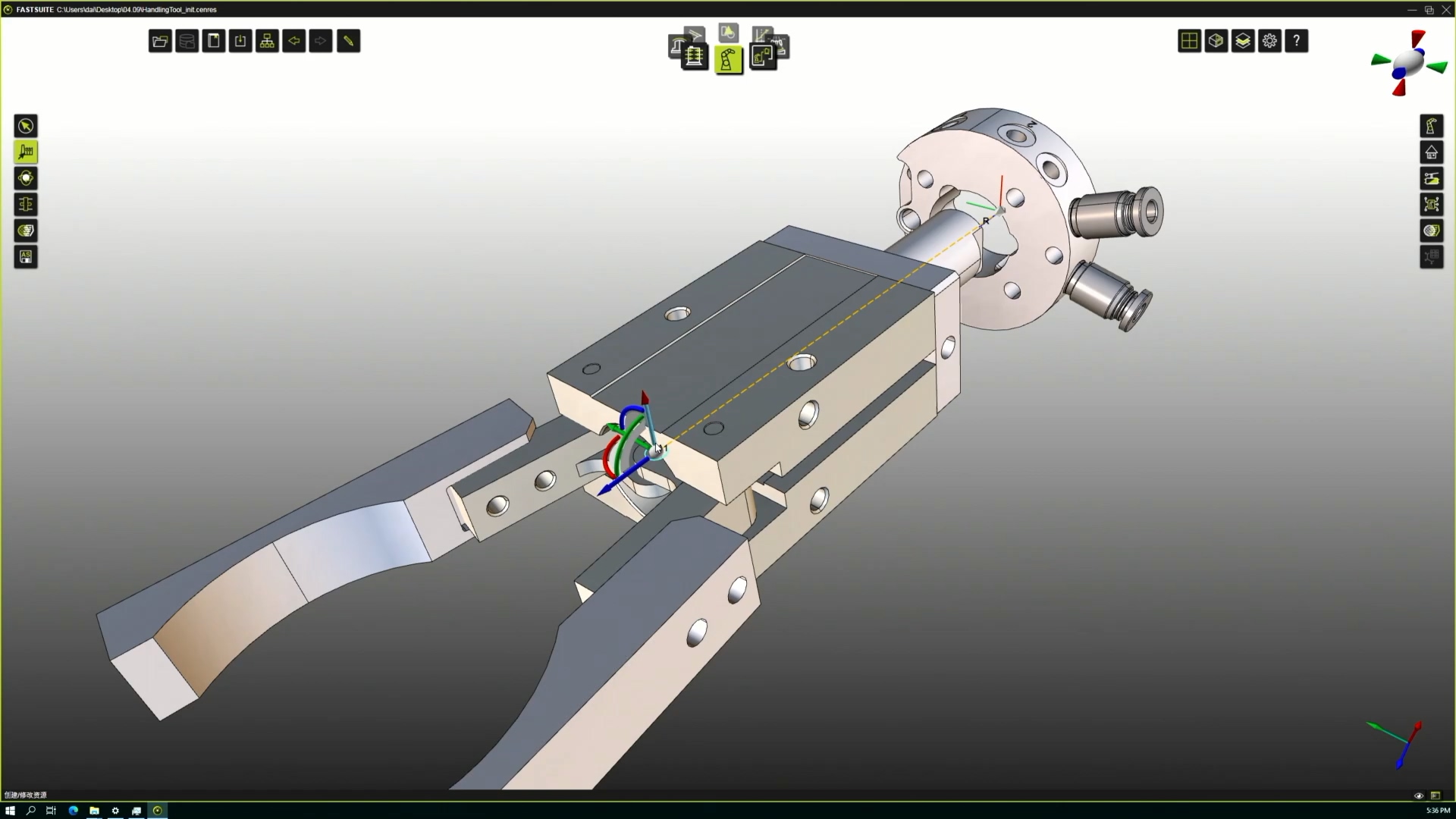
- 建立第一个“手指”的旋转机构,并关联其几何特征(此处行程设置为旋转30°):
- 
- 在建立下一个旋转机构时前,考虑旋转机构的建立顺序。与关联的运动机构不同,夹爪的两个“手指”运动应具有同时性,并互不关联。软件中不提供相应的夹爪机构建立,这一节中会简单的介绍资源特性设置与设置后的简单事件使用。
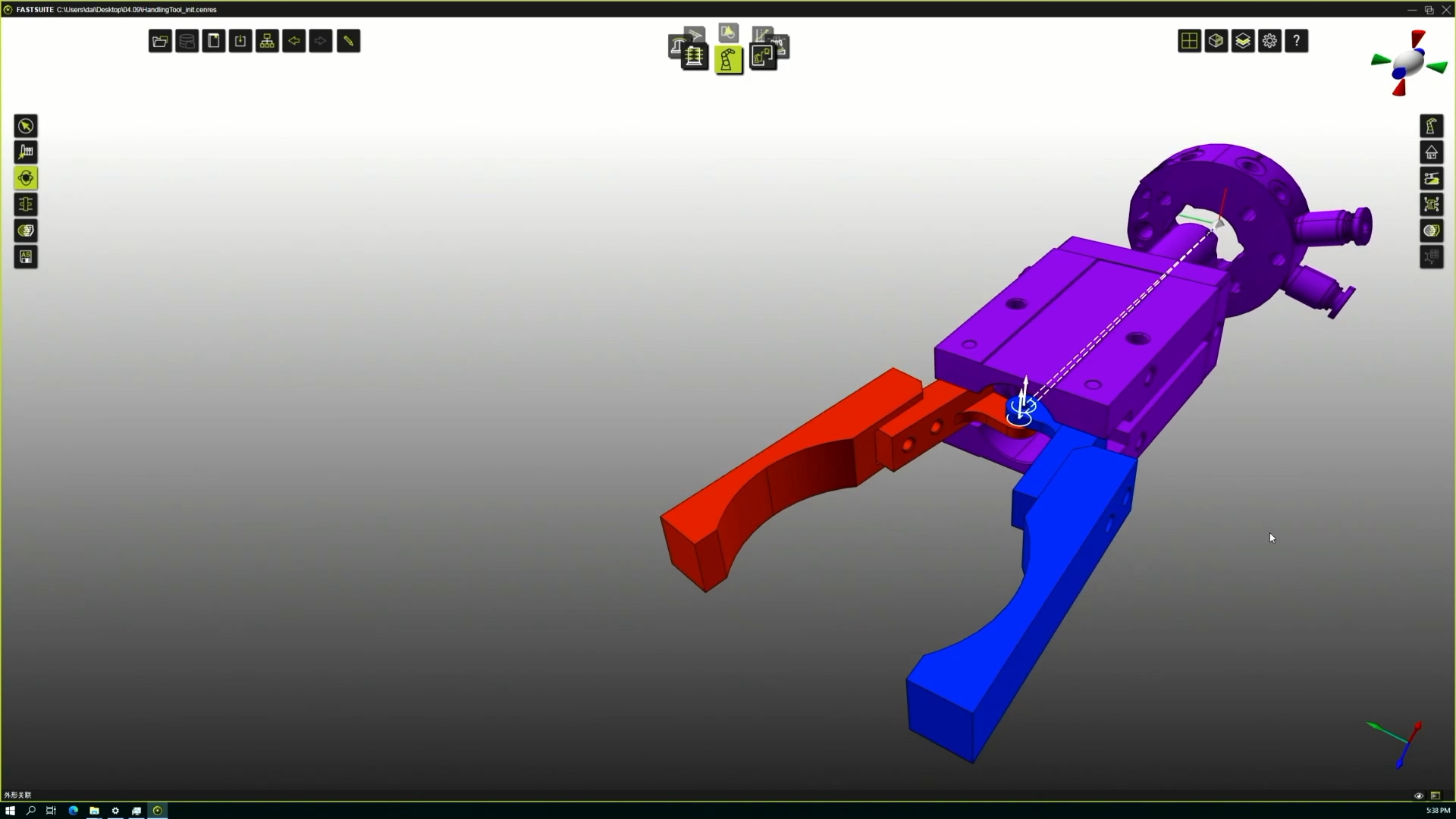
- 建立第二个旋转机构并将第二个“手指”与其关联,注意其运动方向与第一个旋转机构相反,行程相同。
- 
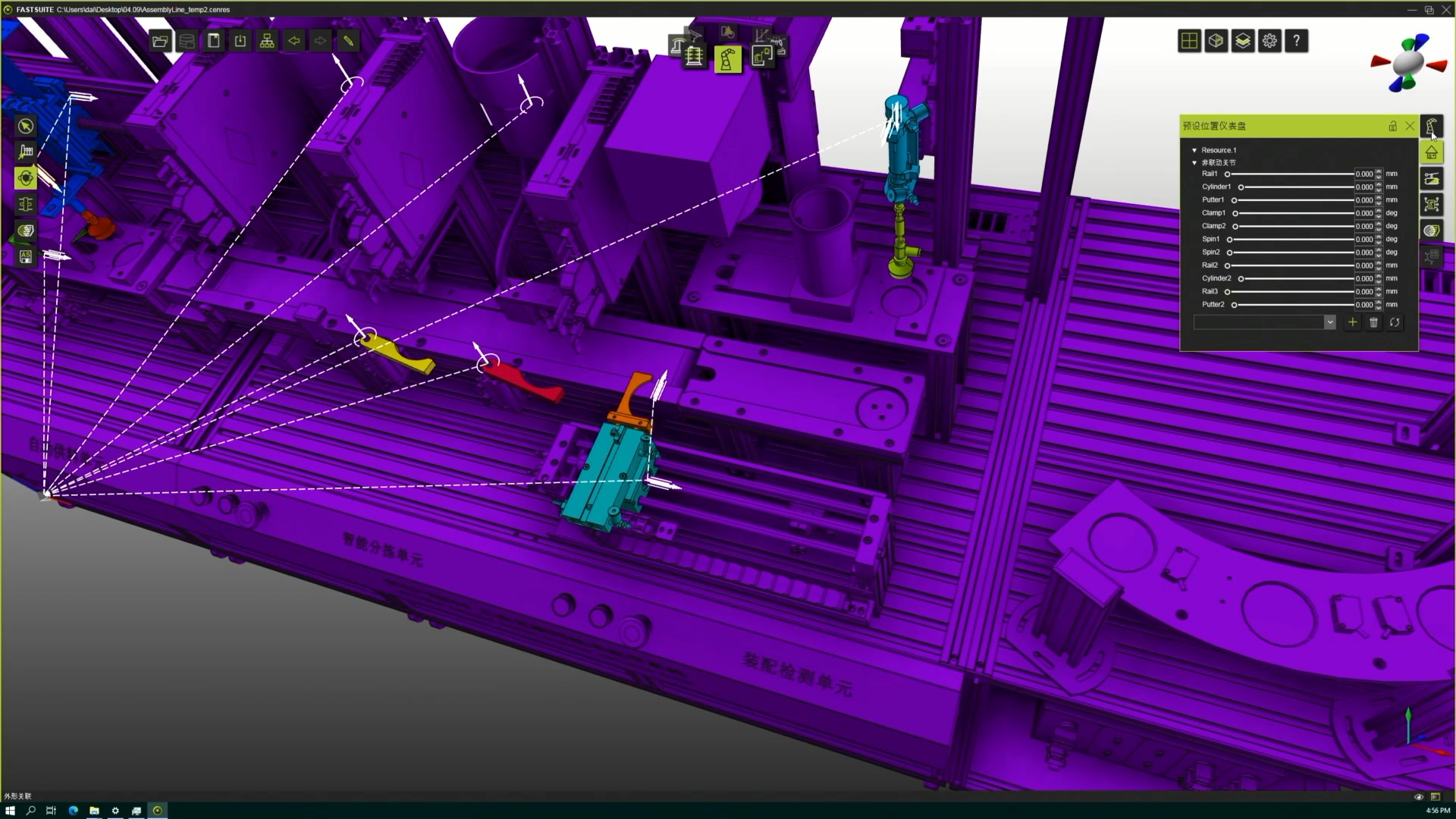
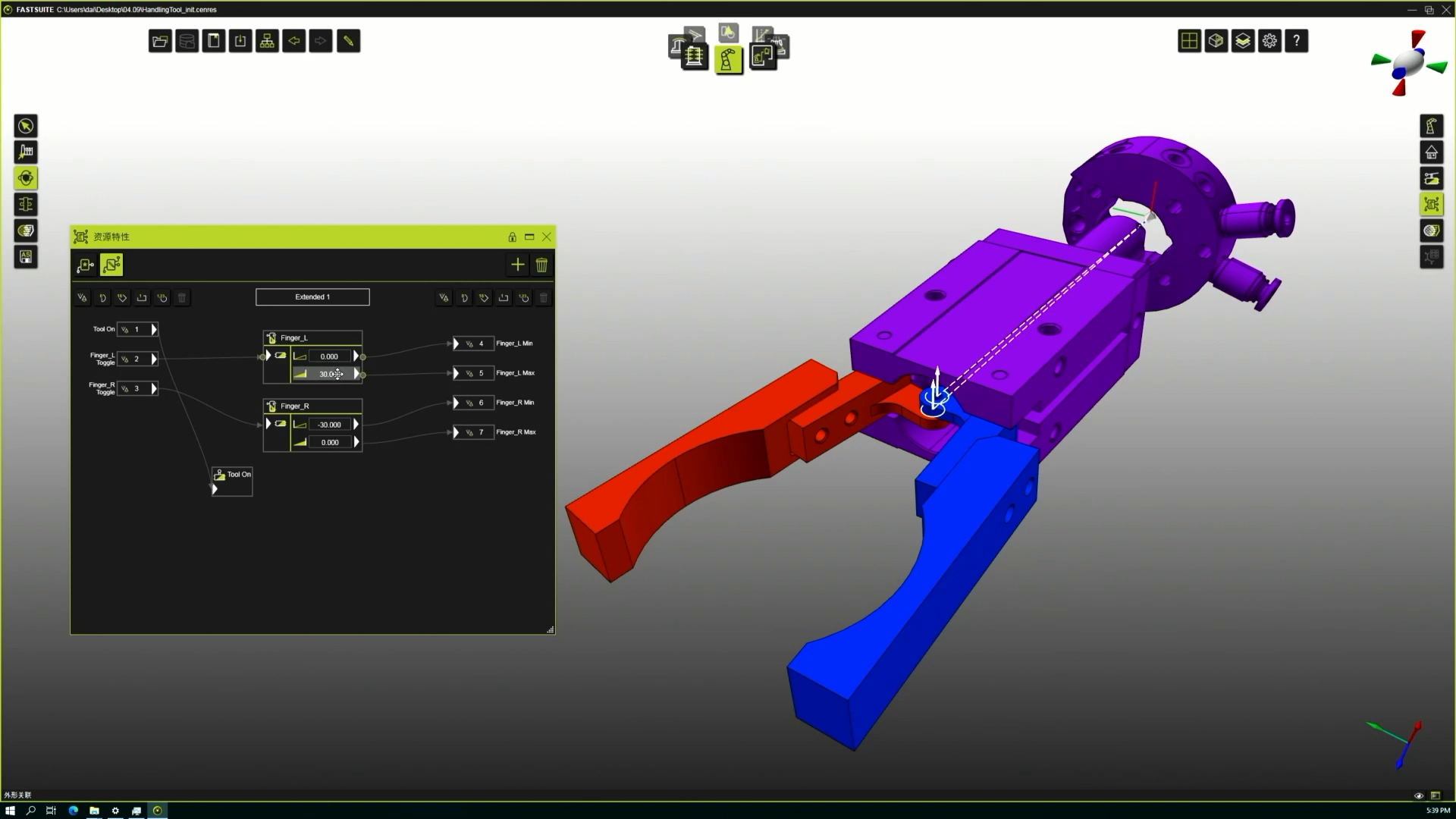
- 完成夹爪建立后,点击右侧工具栏中的资源特性,会默认产生资源的信号关联,如图:
- 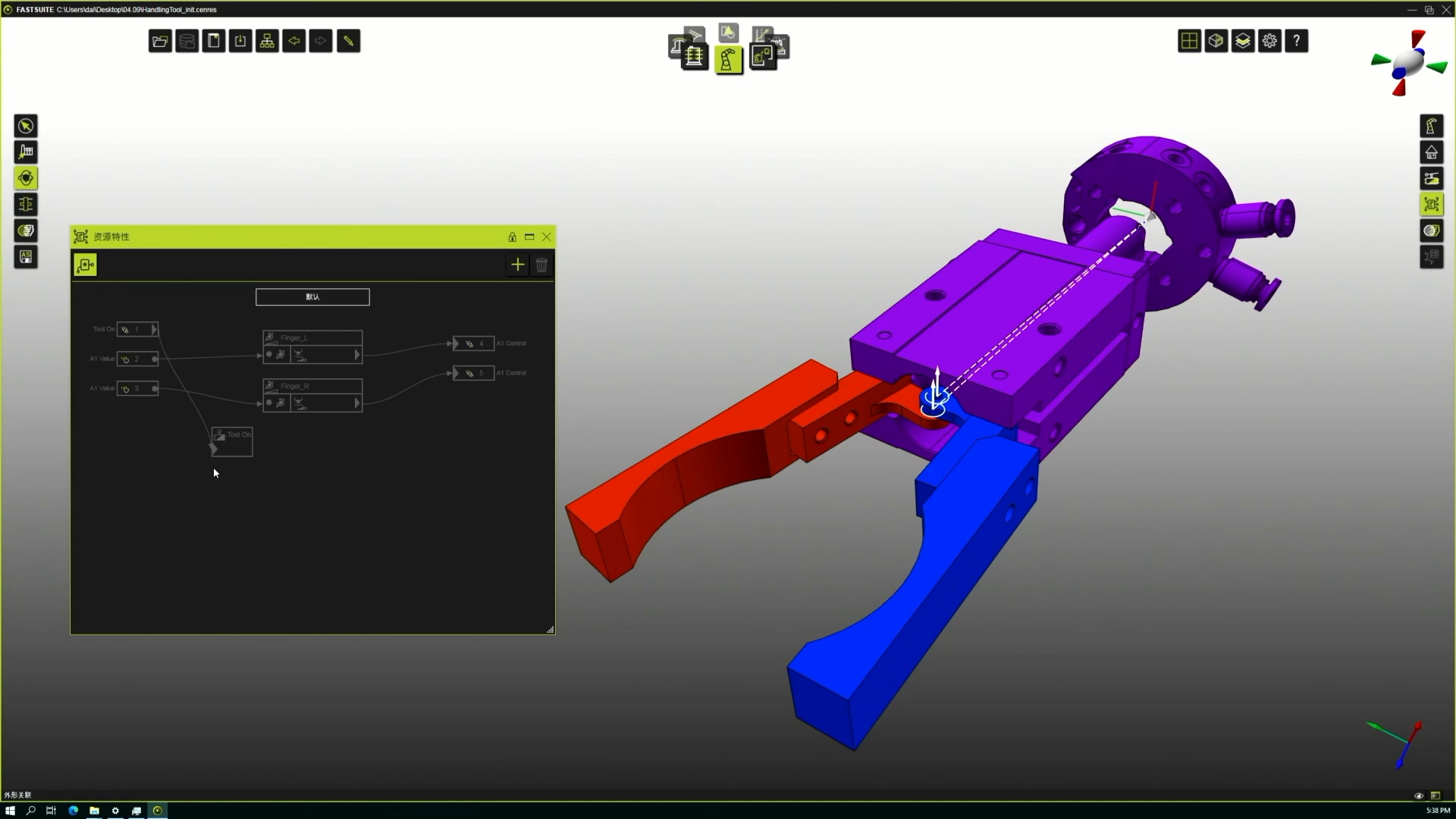
- Tool On信号为自动生成,与右侧的A1 Control值为输出信号;
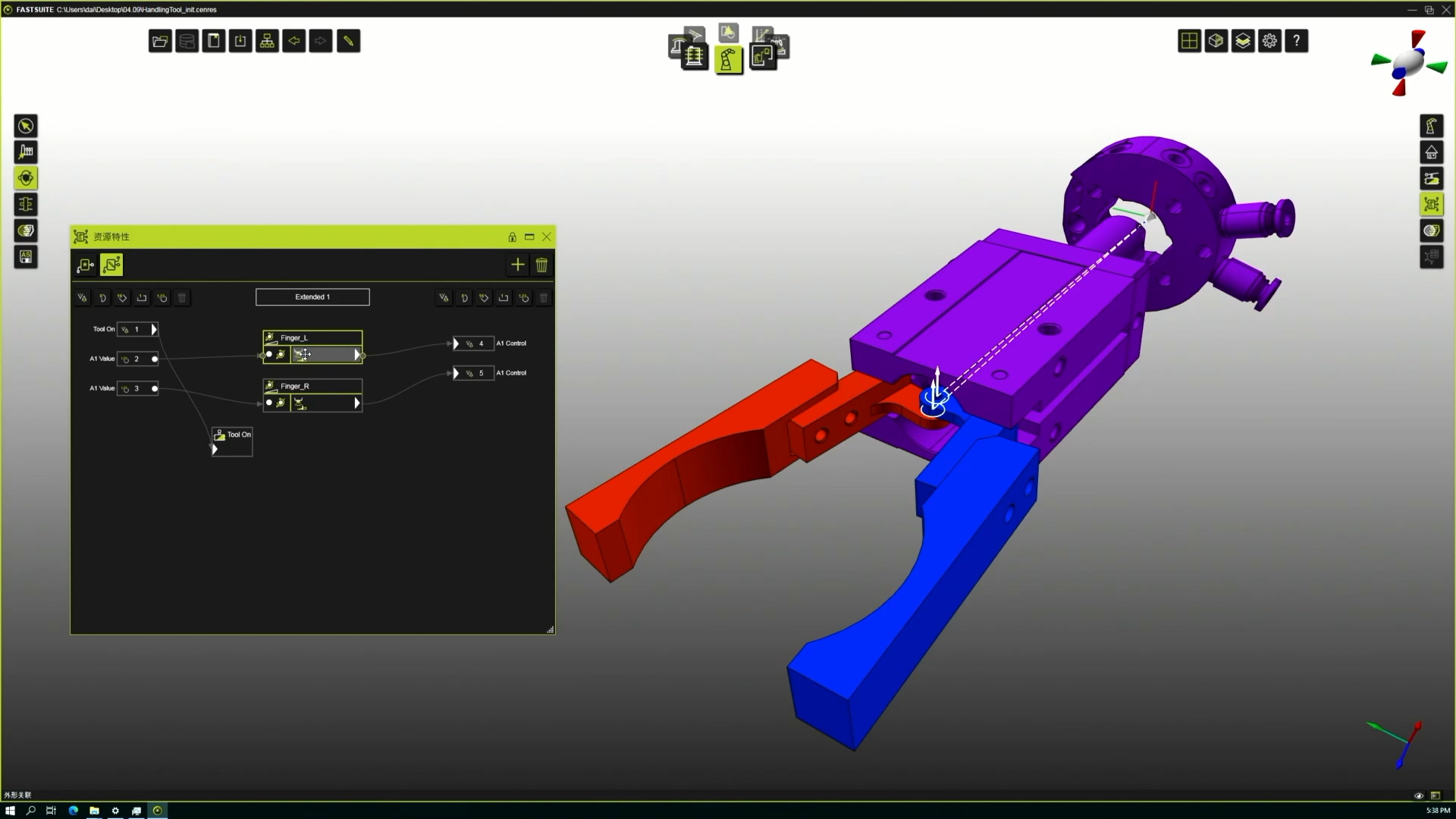
- 点击资源特性窗口右上角的+号,设立一个自定的资源特性,再次页面中可以对资源特性进行修改与保存:
- 
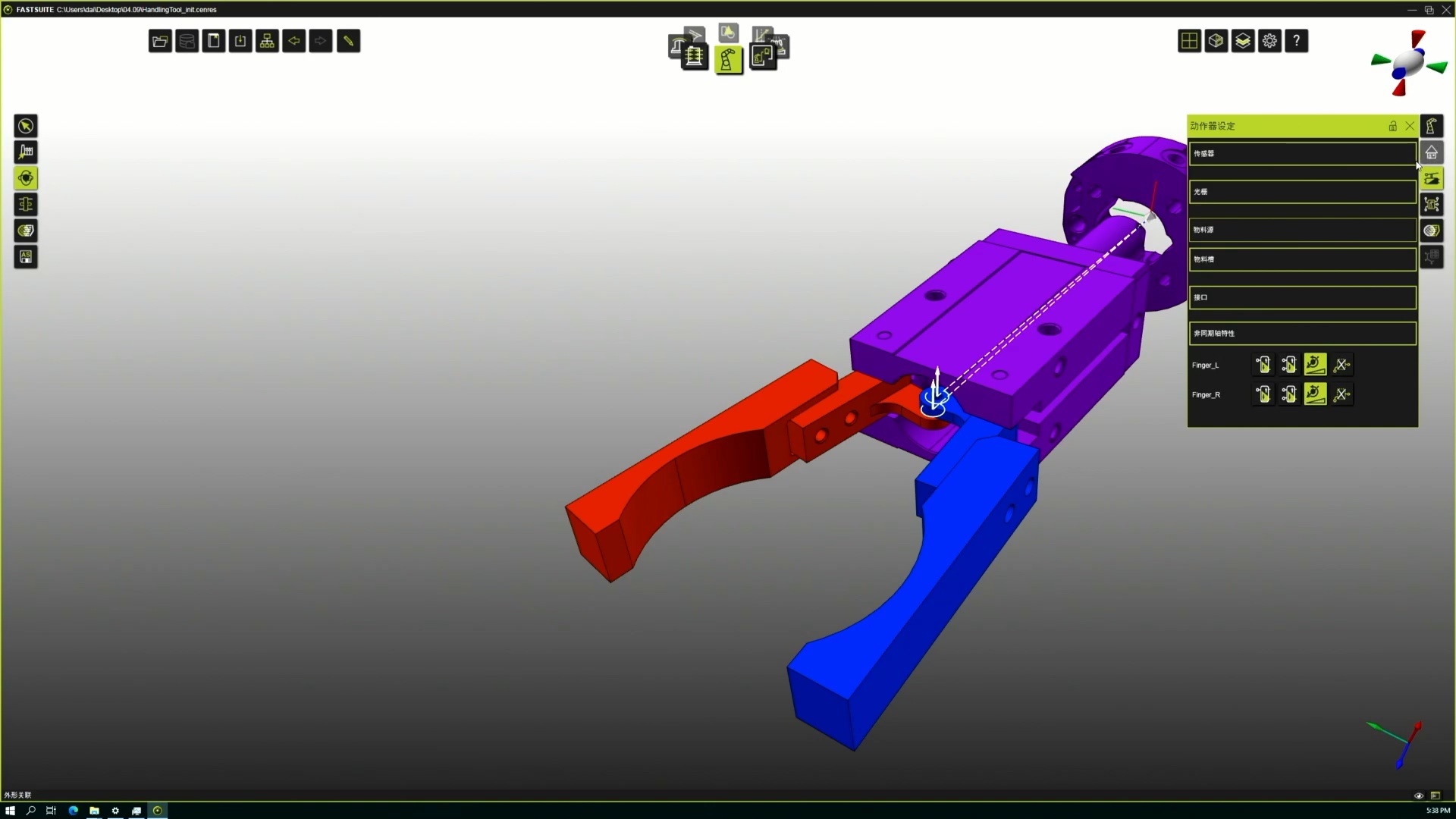
- 点击右侧工具栏的动作器设置,选择最下方的非同轴特性。软件默认生成的资源为单一轴值,此时需要一个特定的输入信号,从而设定运动轴的数值。
- 
- 对于机器人夹爪,我们需要的是设定一个单一的运动轴值,在夹爪接收到输入信号时,会运动到相应的运动值。软件中的信号仅为一个模拟输入,并不代表输入的实际信号需要为脉冲信号。关于信号的虚拟调试,详见具体的虚拟调试章节。
-
- 在动作器设定-非同期轴特性中,设定两个“手指”的特性至“单稳态(Monostable)”:
- 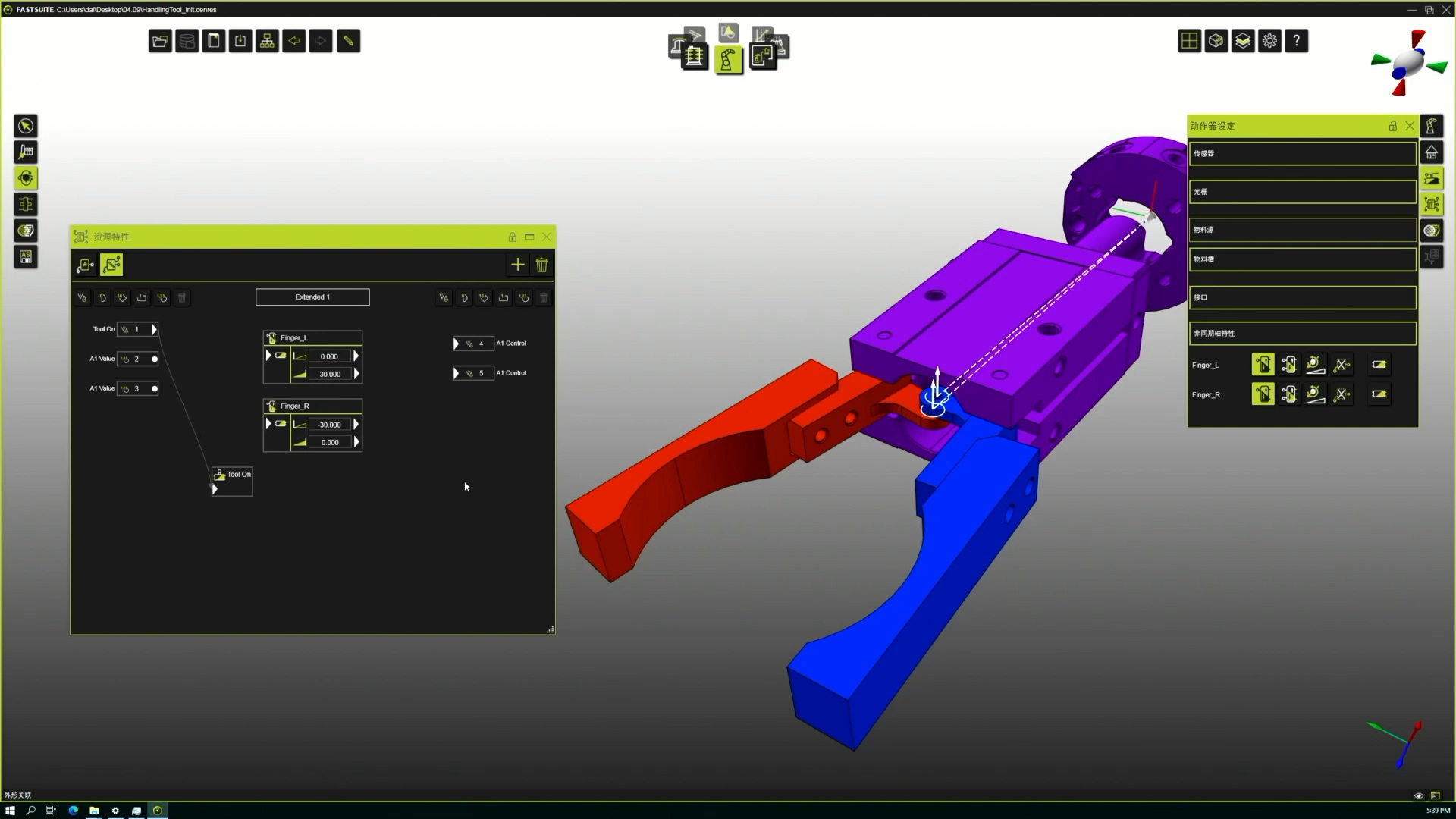
- 此时打开资源特性界面,可以看到一个新的资源特性已经出现。其中包含两个“手指”的控制信号输入端以及输出端,和自动生成的Tool On信号。与默认资源设置相比,单稳态资源具有一个输入端以及两个输出信号,对此可以利用单个输入信号进行输出的调整。简单来说,输入信号为0或1的值,并彼此有相对应的输出值。
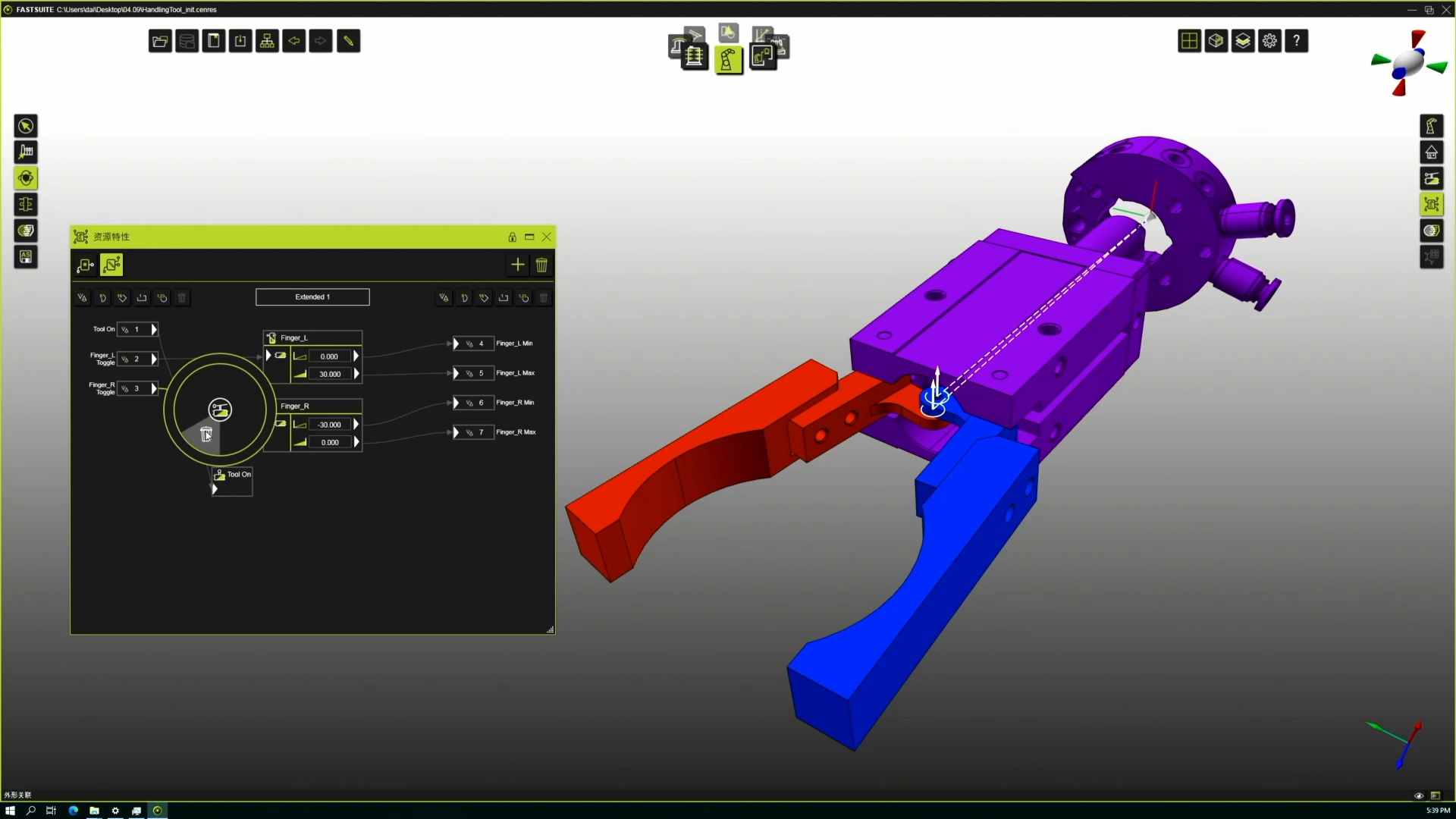
- 点击资源特性右上角的删除按钮,可以删除本页动作器设置,再次点击+可以由当前设置创建新的资源特性,可以看见在设置单稳态之后资源需要两个输入信号,每个信号对应两个输出数值。
- 
- 右键点击信号间的连接,可以删除信号连接并对其进行重连:
- 
- 为达到夹爪同时运动的目的,我们可以将分属两个夹爪的信号整合为同一个,这样一来在信号到来时两个关节会同时产生运动。
- 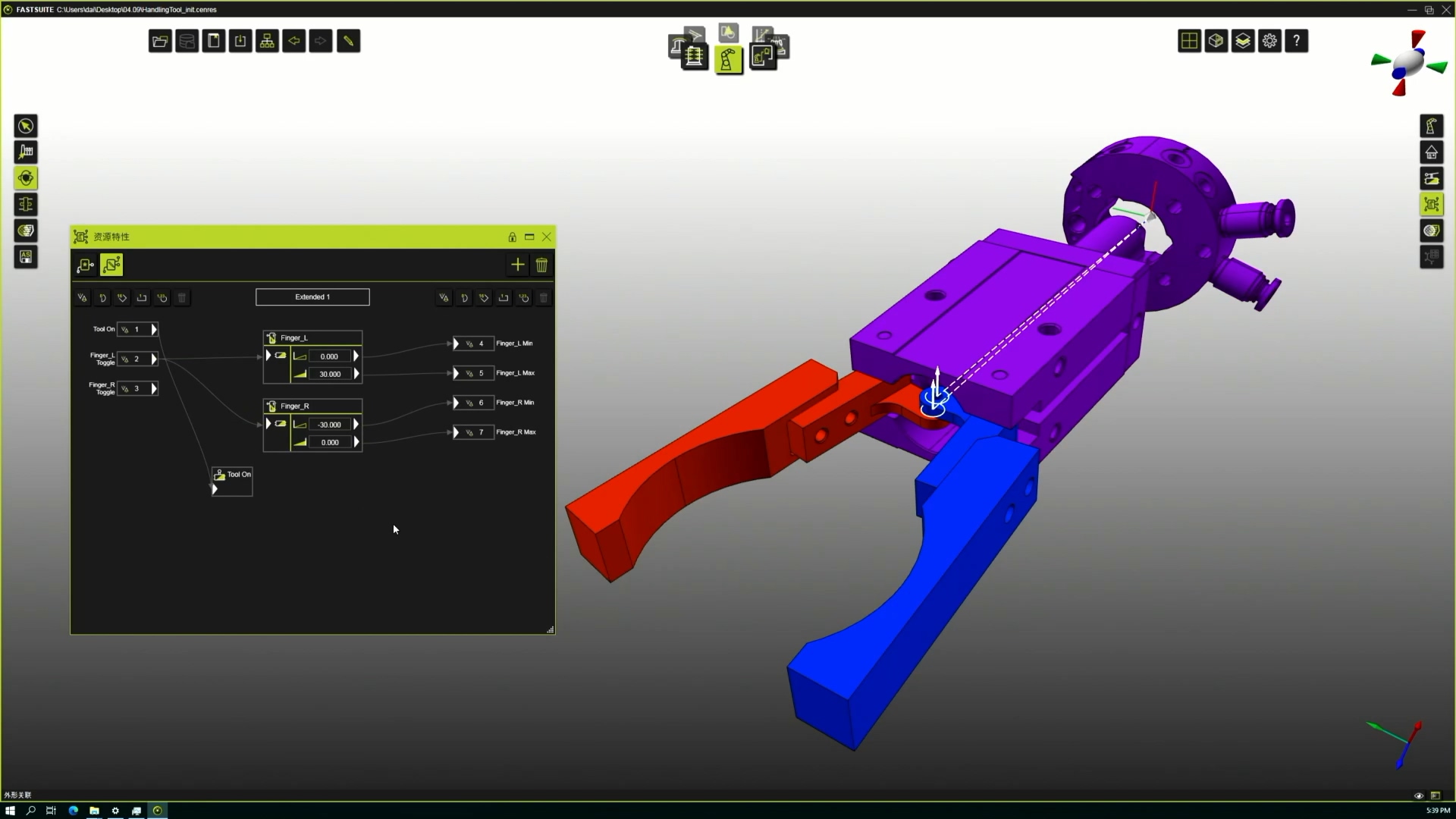
- 保存最后的资源,至此,机器人夹爪的初步设置完成。