第二节:建立布局、连接控制器
===
### 建立布局
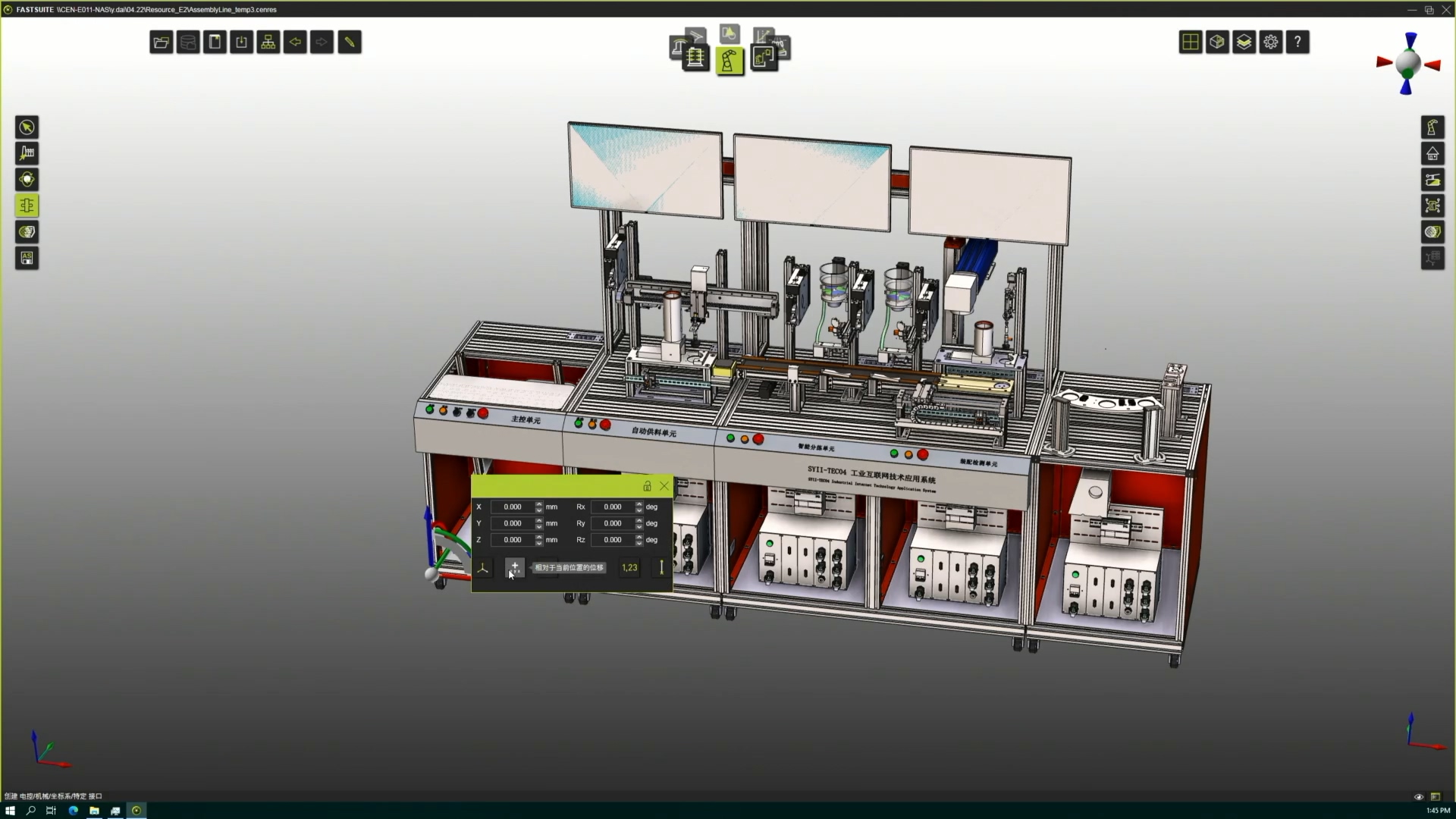
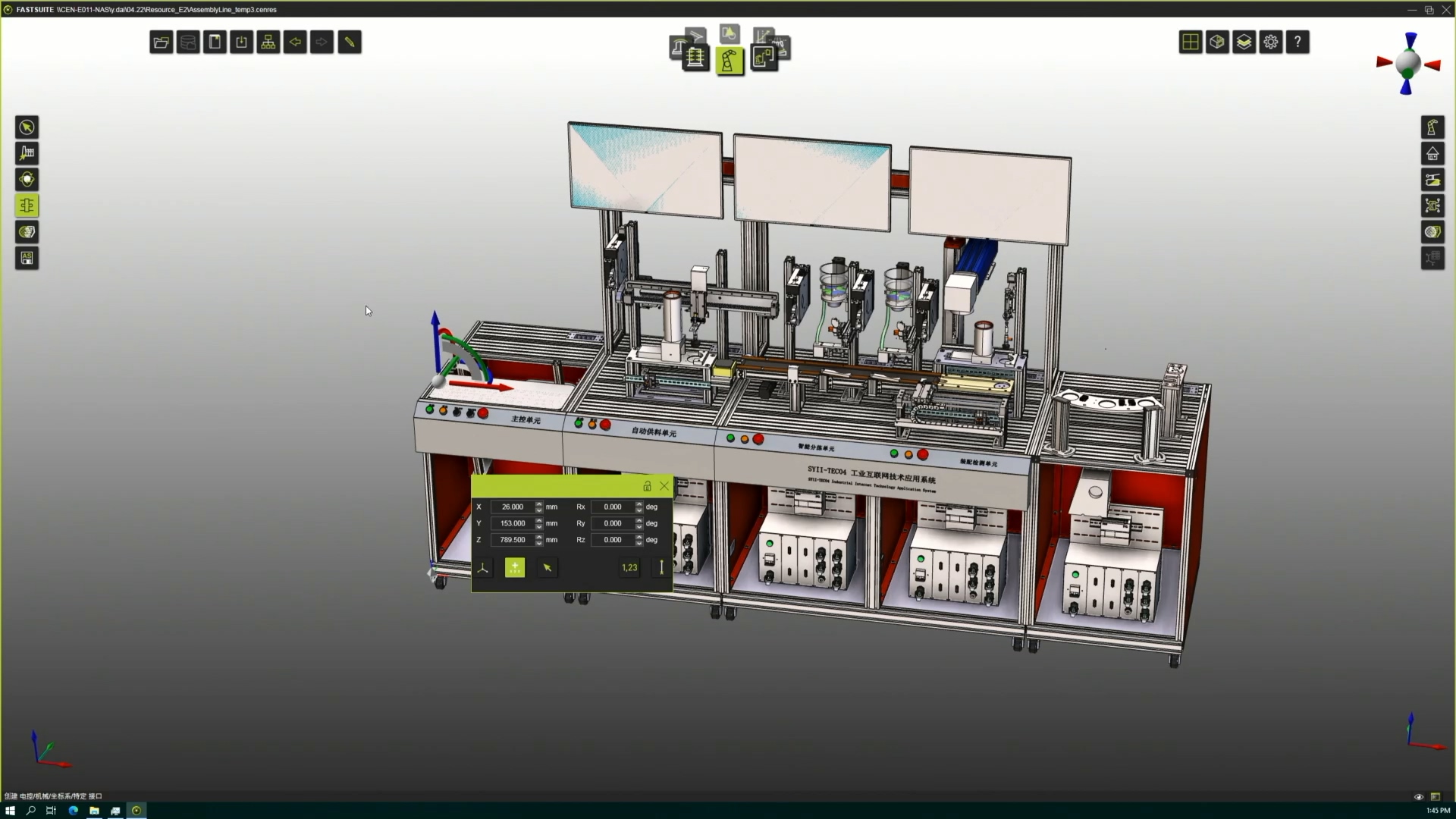
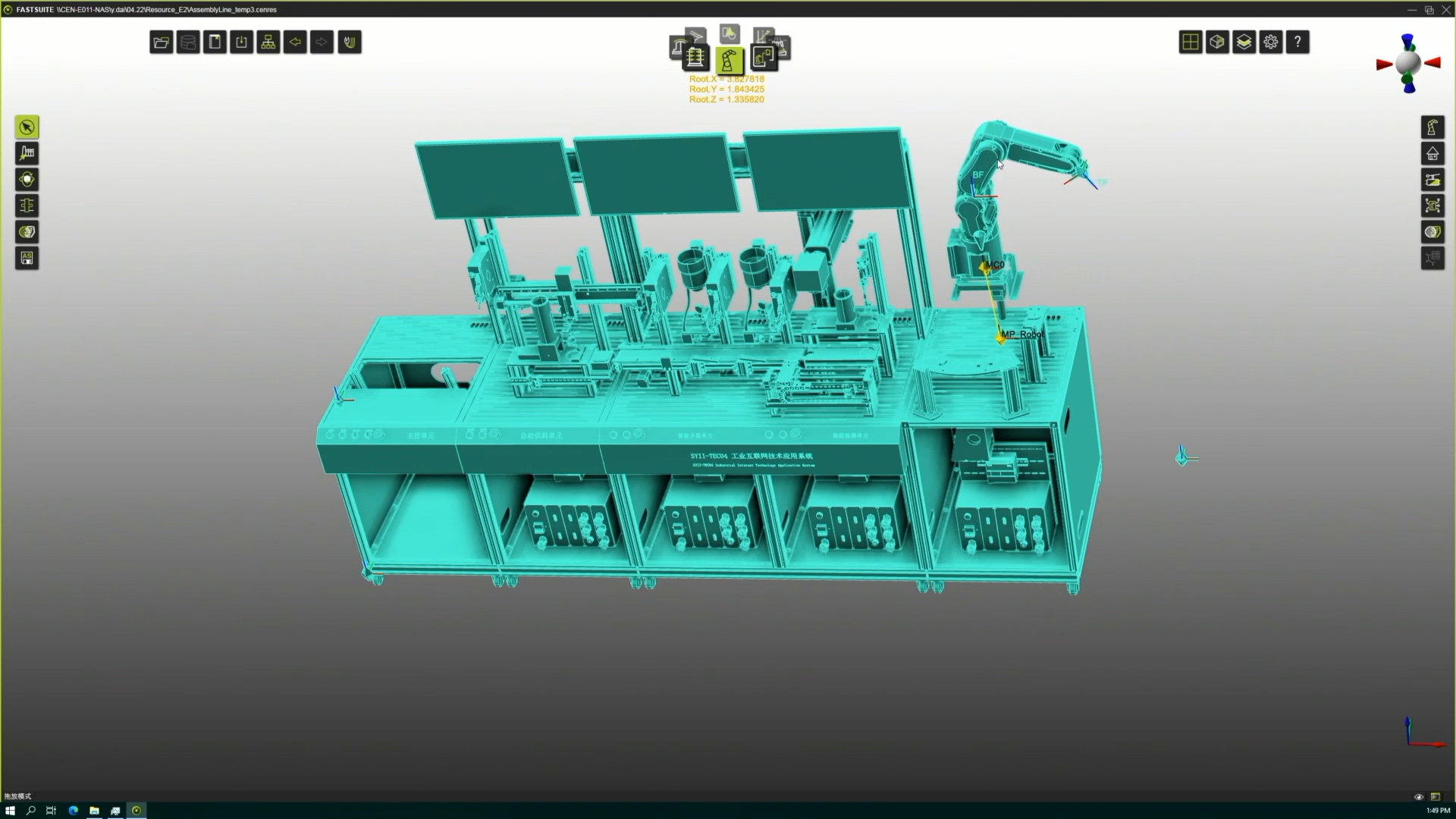
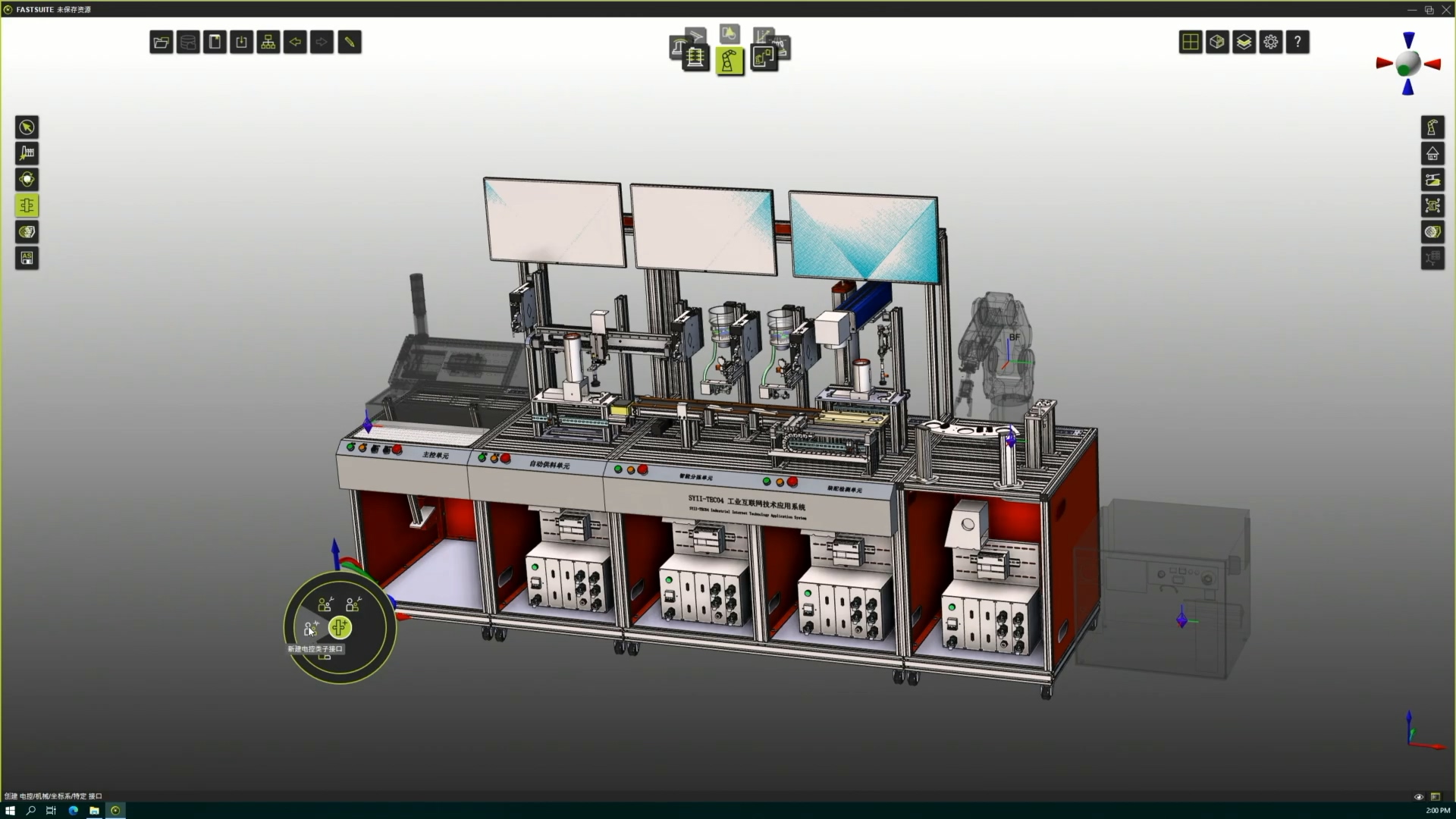
教程中,PLC的摆放点相对组装线的坐标为(26, 153, 789.5)、机器人摆放点为(2697.209, 541.232, 787.5)、机器人控制器摆放位置为(3298.727, 885.149, -73.067)。利用操作器的相对坐标功能,可以轻松将坐标轴移动到相应位置。
选择将操作器点选至组装线的原点,左键点击坐标系原点打开坐标点数值,选择第二项,输入相对坐标的数值,此时可以将坐标置于所需的位置。
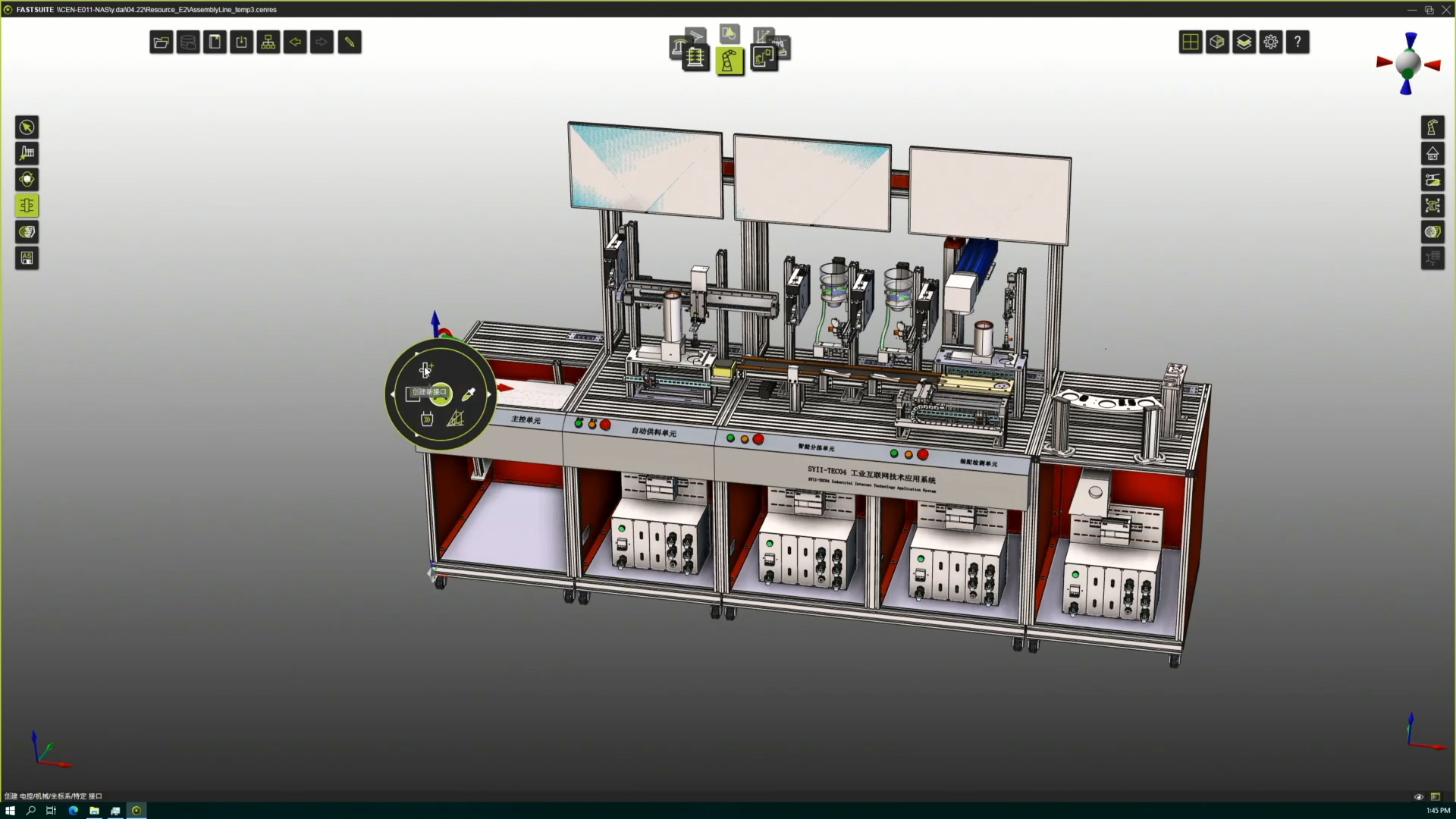
#### 接口
接口类型分为子类与父类:
- 父类接口为固定接口,其功能为定位,与子类接口连接。在软件中可以设置父类接口的类型,如电气与机械接口。除此之外,还可以定义接口可以连接的子类资源类型,如设定接口仅可以机器人、变位机等。
- 子类接口为浮动接口,其功能为与父类接口连接。子类接口需要与指定类型的父类接口连接,如电气接口仅可以连接电气父类接口。子类接口的类型无法设置,由资源本身的类型决定。
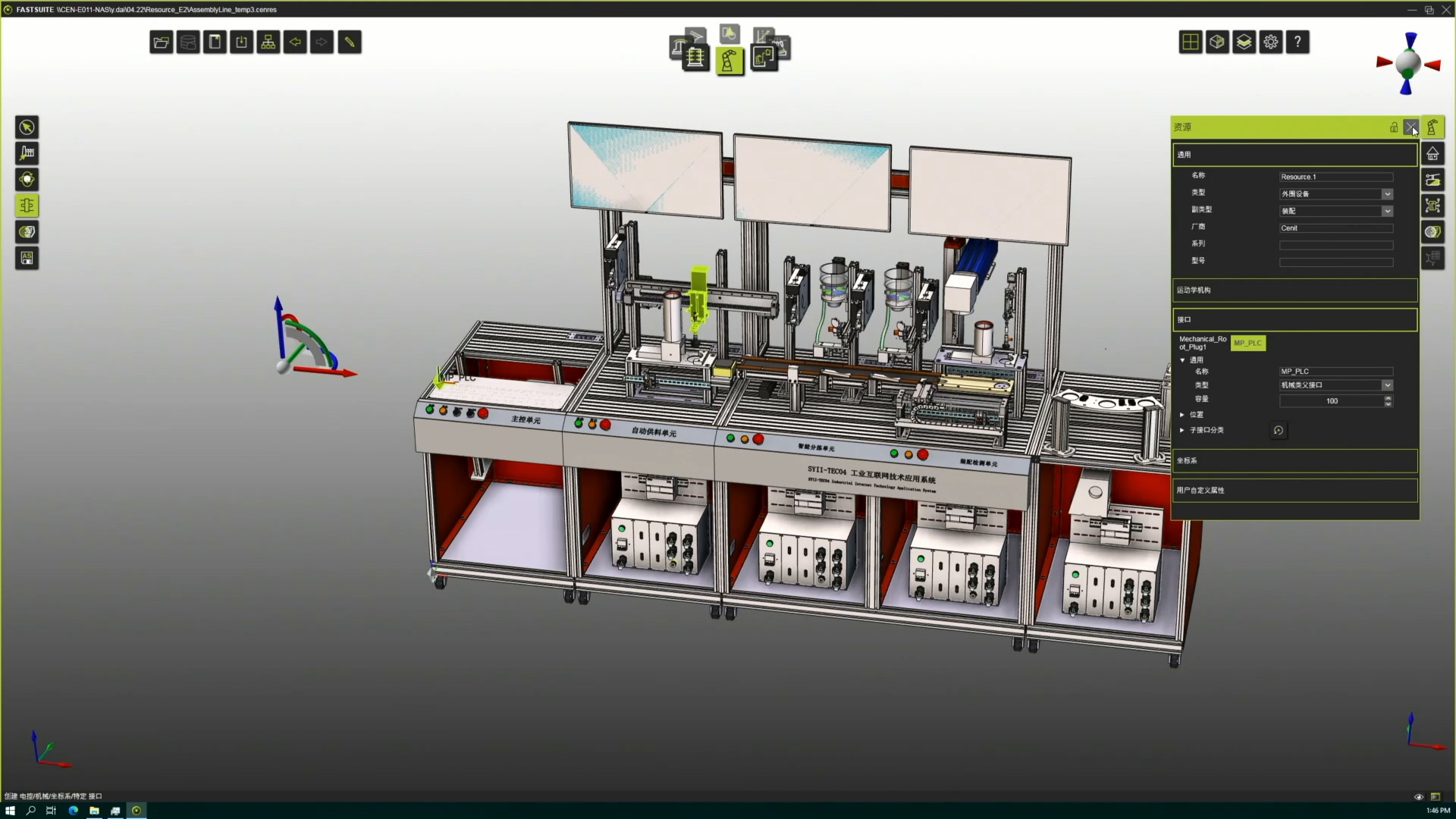
将操作系移动至PLC摆放点后,在软件中设置第一个机械父类接口。
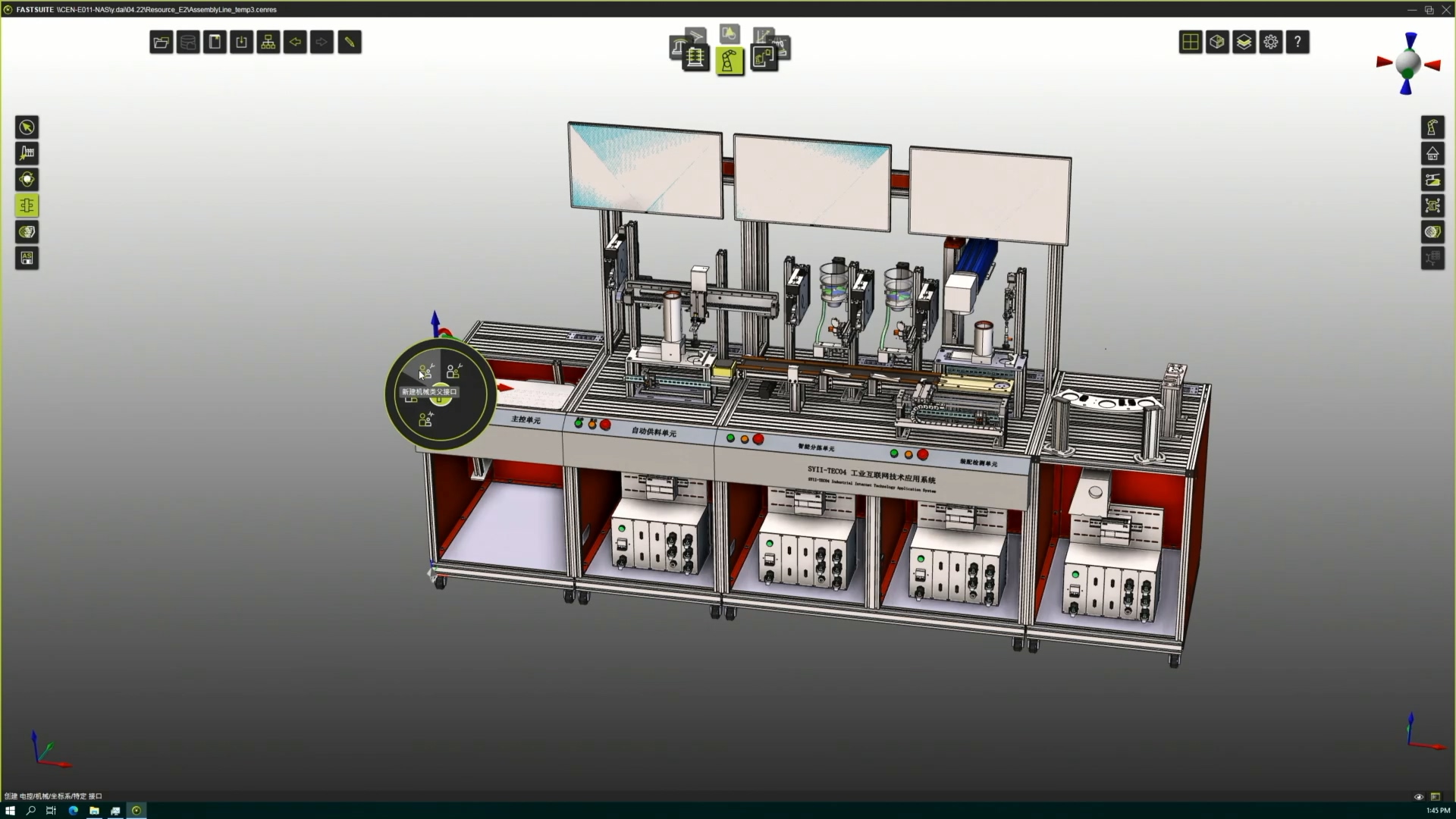
在资源特性选项中可以对接口名称与连接类型进行定义。
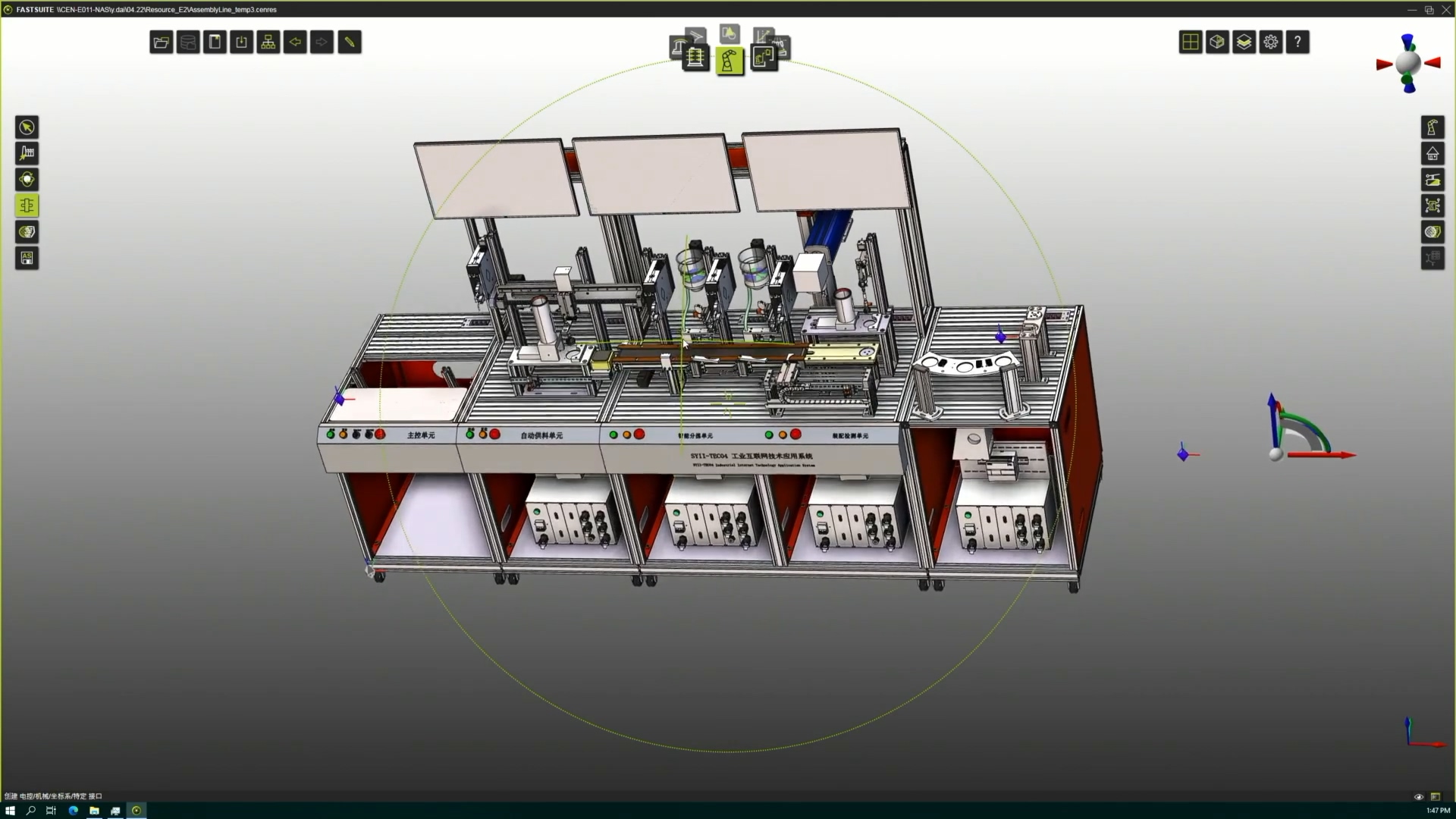
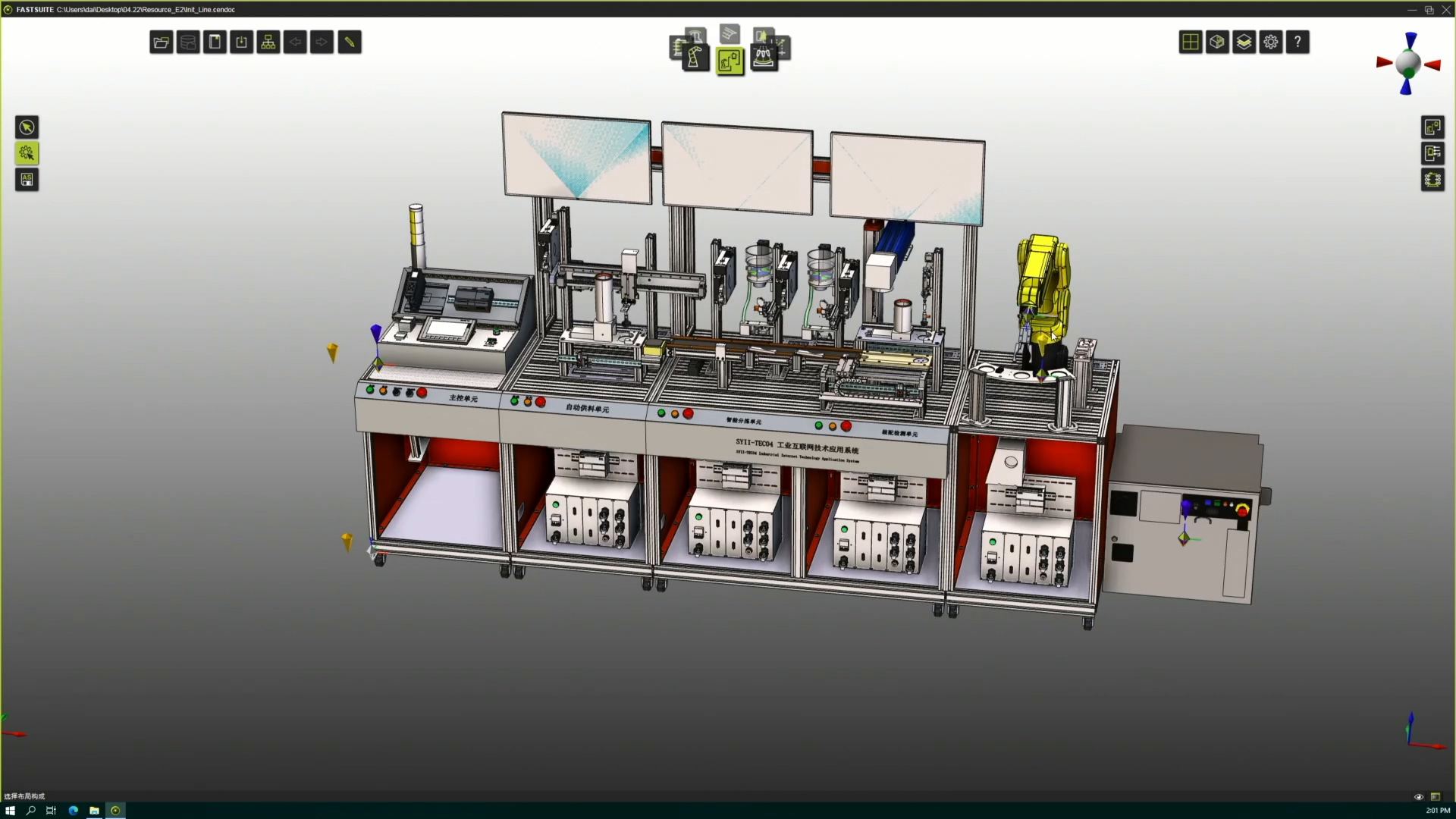
以相同的方式建立机器人、机器人控制器的摆放点。最终效果如图所示(三个蓝色连接坐标):
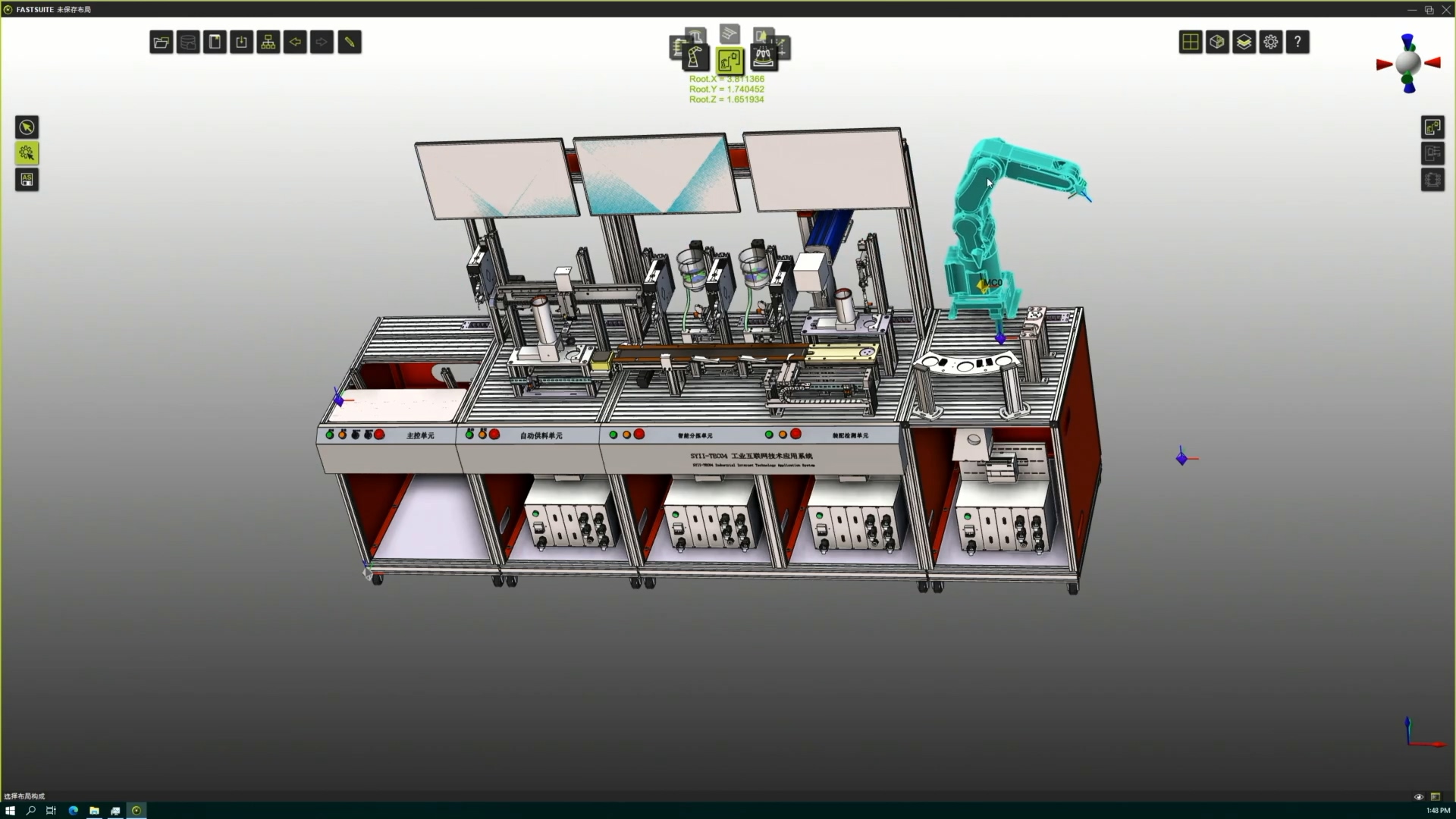
导入机器人资源,LRMate_200iD-4S.cenres,在布局模式下(布局模式有两种方式,视频中有展示)将其拖放至机器人连接点:
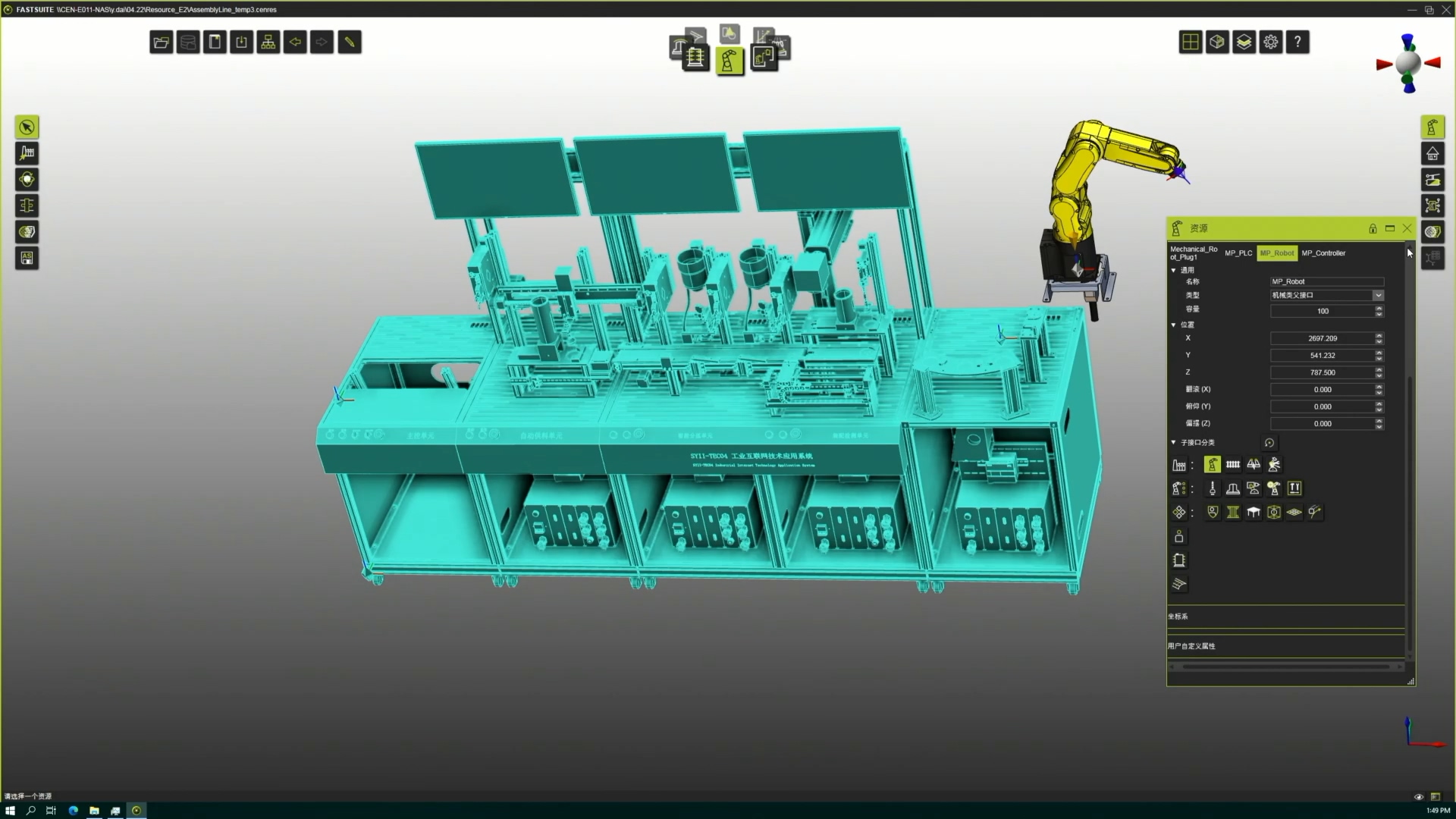
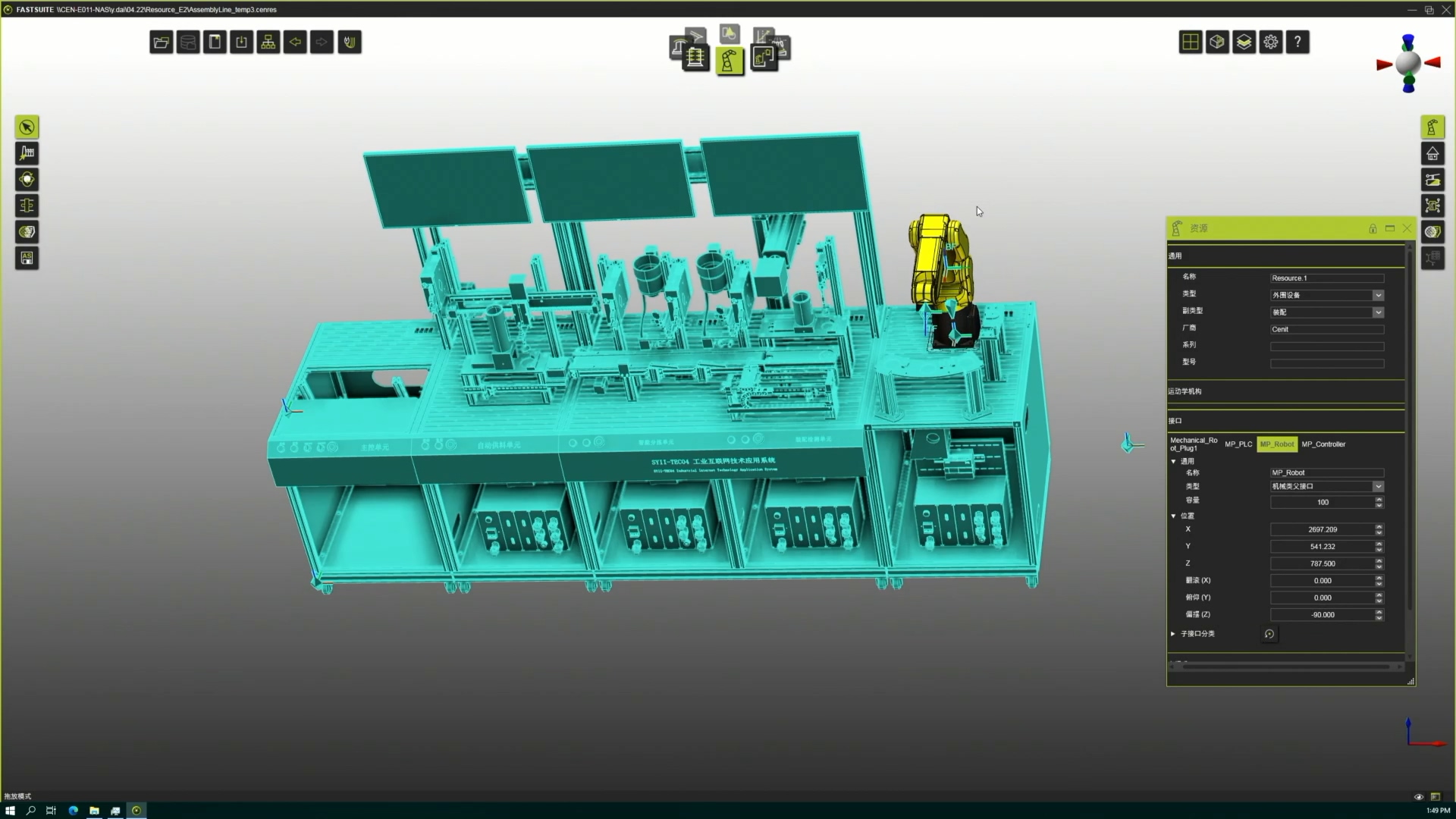
此时的机器人无法自动连接至此接口,需要手动连接两个接口(视频中有展示使用饼状菜单连接的方式),此时需要重新设置机器人的接口连接类型至机器人资源,如图所示:
此时可以进行机器人的自动连接,当机器人被拖拽至连接点附近时,会生成一个黄色连接线,此时代表机器人会自动连接到相应位置:
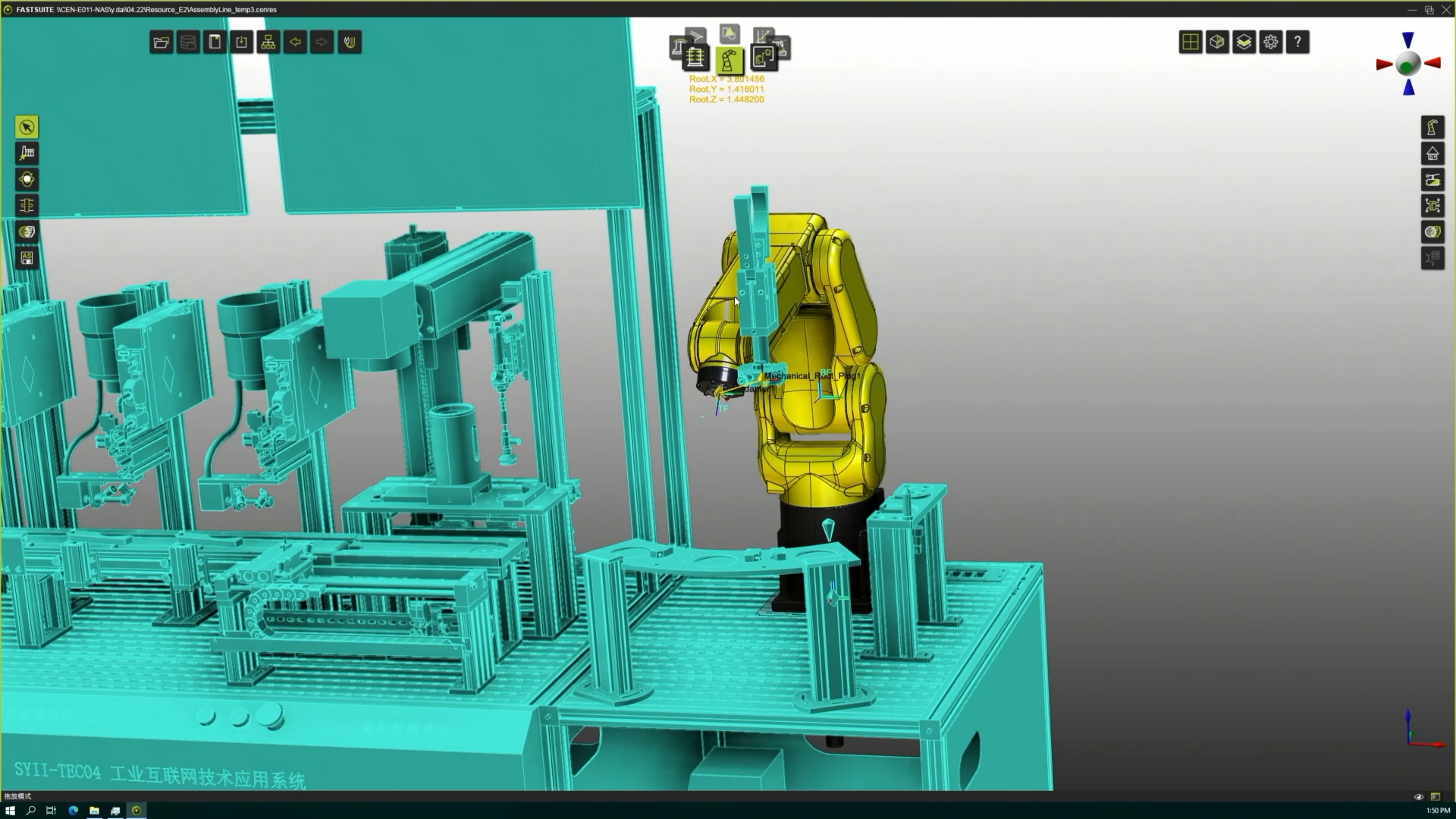
此时可以注意到,机器人的朝向错误,需要将其旋转90°。对此做法有多种,本节中仅介绍如何旋转连接点方向。
打开资源菜单,将资源接口特征打开,在位置选单中将Z轴旋转设置为-90°,按下回车键,连接口会即时生效,机器人朝向设置正确。
导入机器人手爪资源ShuangyuanHandlingTool_Combined.cenres,将其拖拽至机器人末端关节,此时手爪会与机器人自动连接。
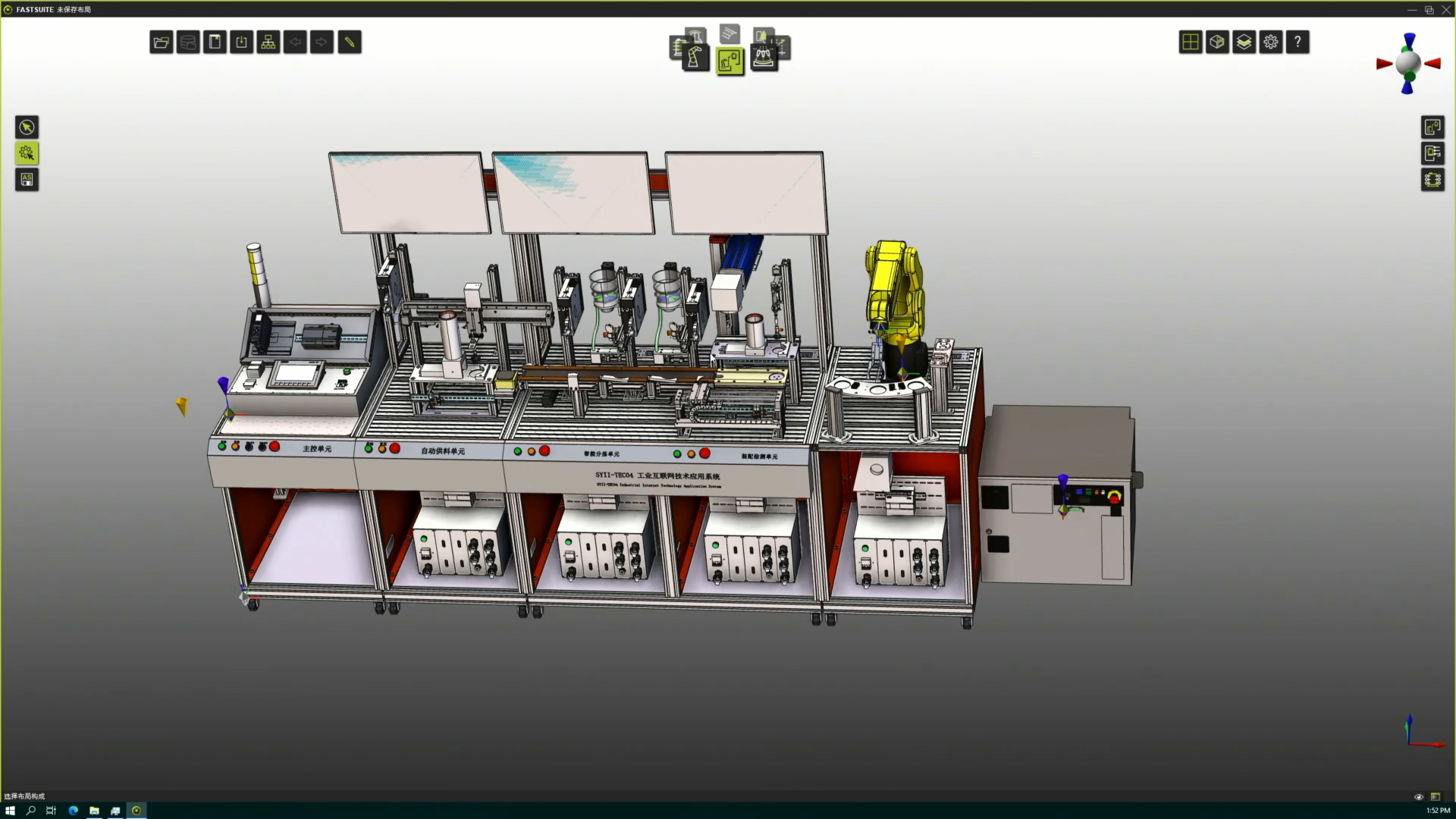
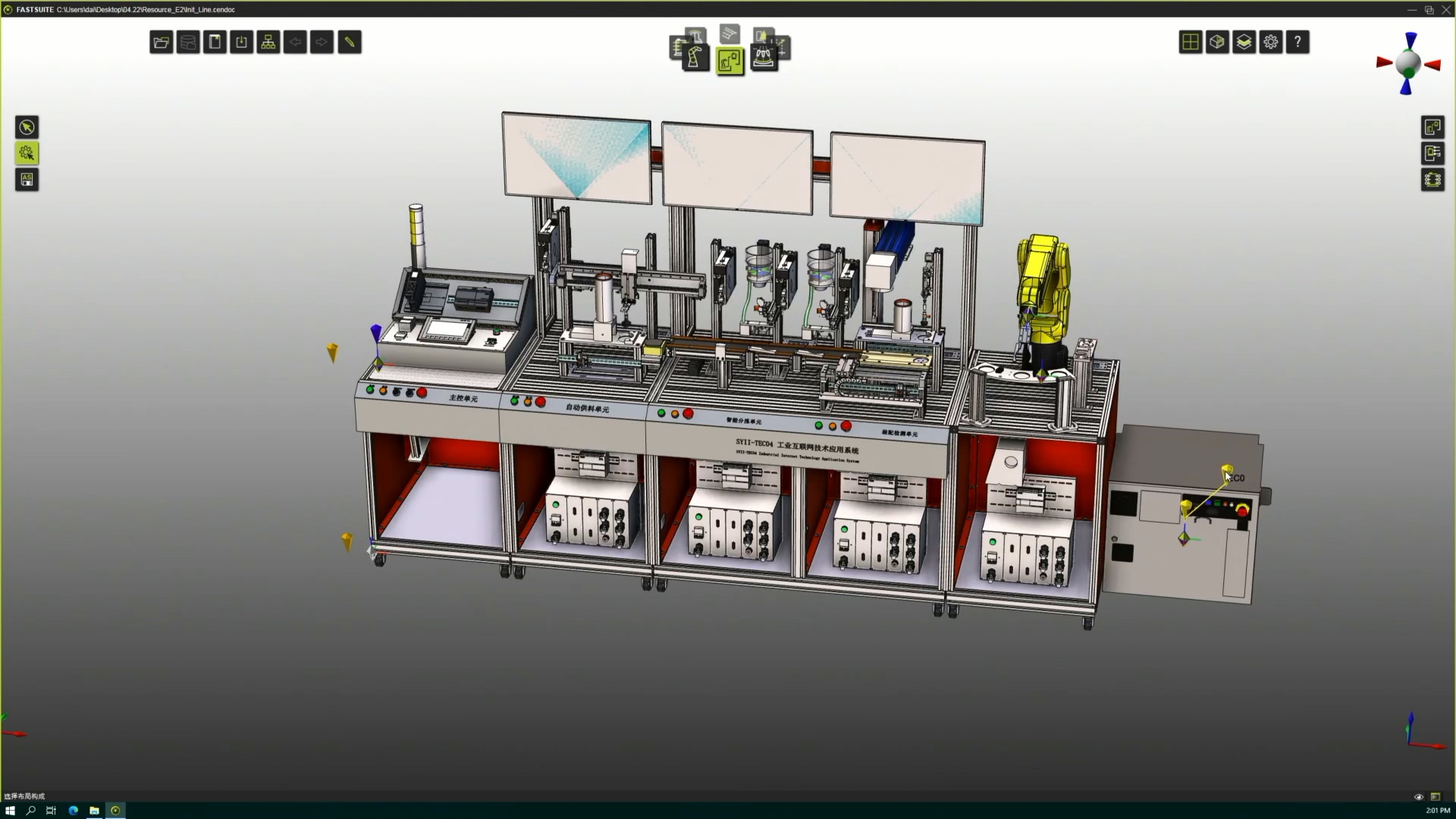
以相同的方式建立PLC(PLC.cenctl)、控制箱(R-30iB.cenctl)的连接点,并将资源拖入,放置至正确位置。如图所示:
### 建立电气连接
在完成机械接口之后,我们需要建立设备相应的电气接口。首先,利用与上一节中相同的方法,在组装线旁(位置并无定义,只要距离不远可以大致确定电气接口的从属关系即可)放置一个操作接口,选择电气子接口:
在资源特性窗口可以定义其名称,为其起一个容易识别的名称。

机器人、PLC在资源建立时默认自带电气接口,无需手动建立。
接下来,调整至布局模式,开始进行电气连接。
首先,用拖动机器人基座上方的黄色菱形接口,其代表电气接口的操作器。将电气接口连接至机器人控制器后方的电气母接口,双方会自动生成黄色连接线,类似于机械连接时出现的连接方式:
之后,拖动PLC、组装线的两个电气连接,与控制器相连,完成场景的电气连接。
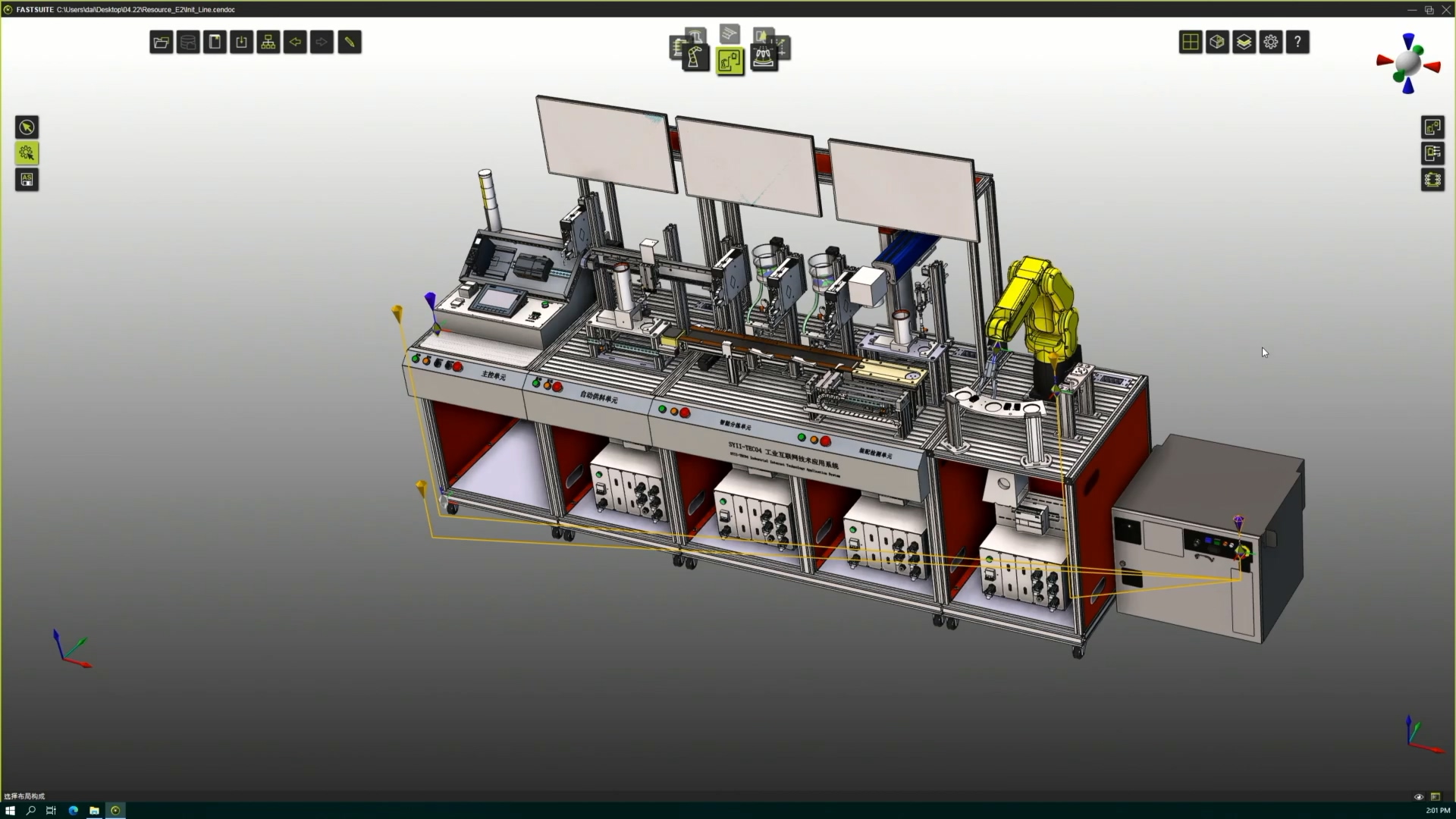
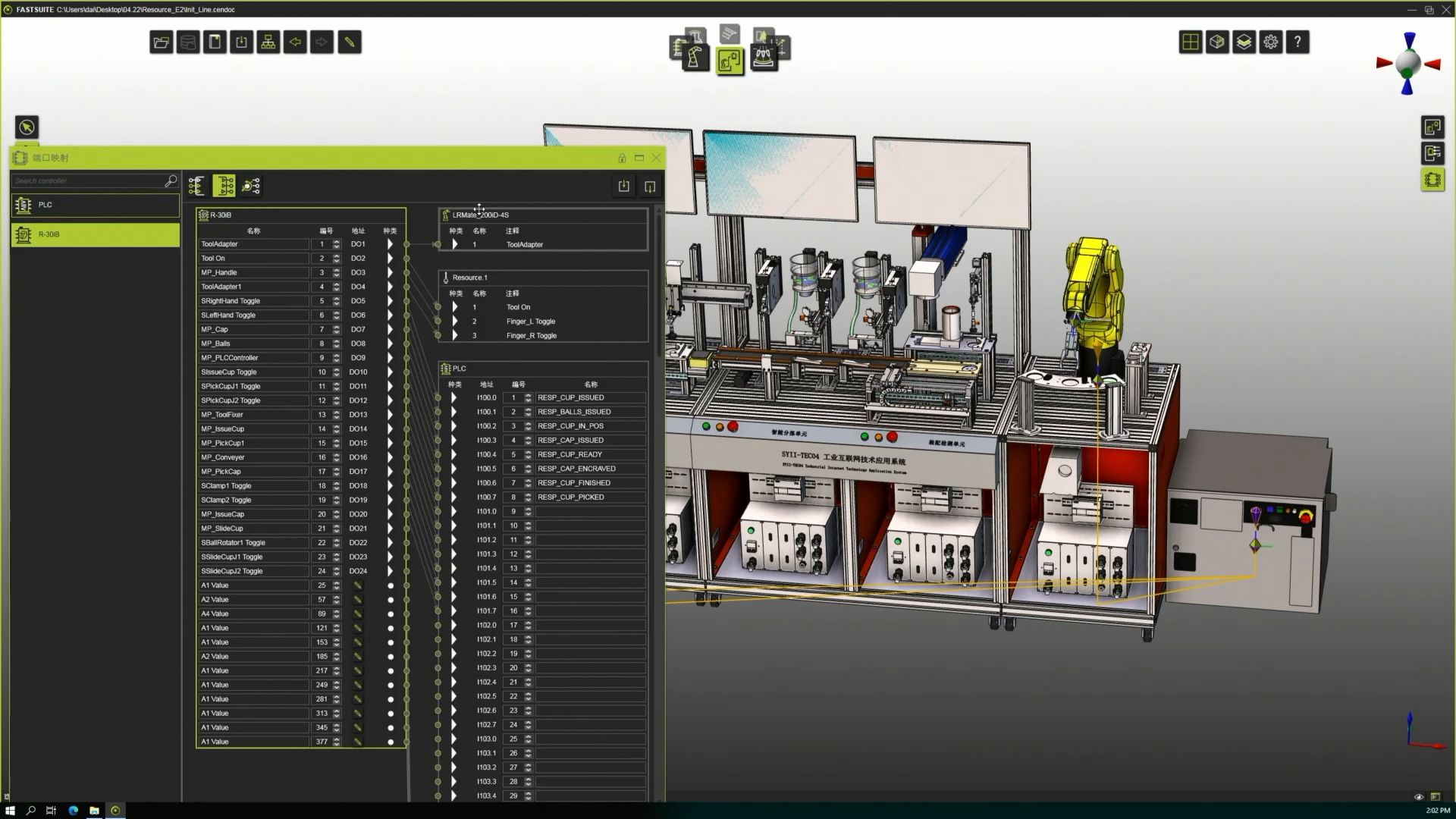
连接完成后在布局设计界面右侧工具栏中,可以打开现存布局的控制连接界面。可以看到控制器、PLC和机器人以及资源之间建立了部分的接口建立。对其信号的解释以及设置会在之后章节中说明。
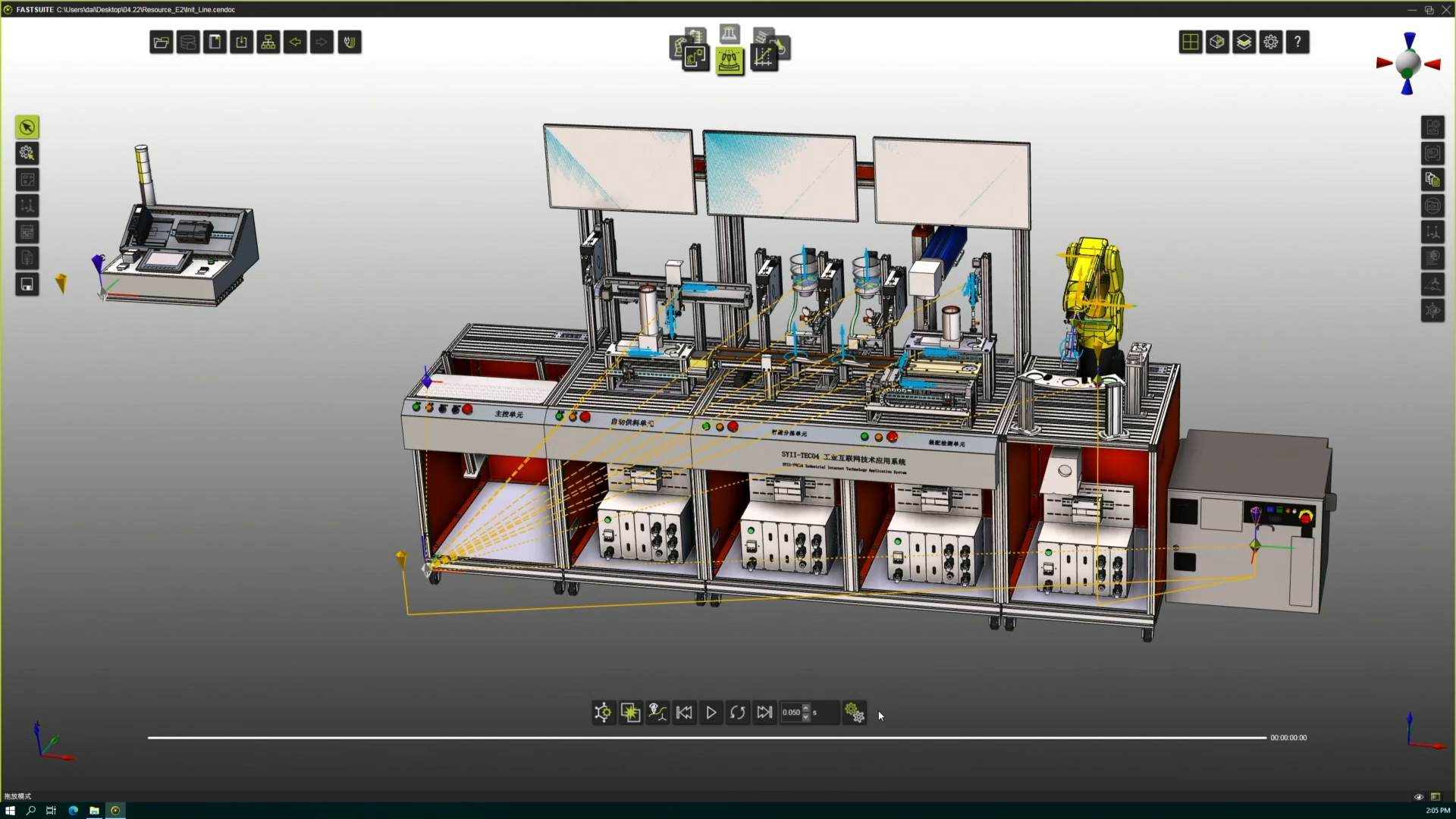
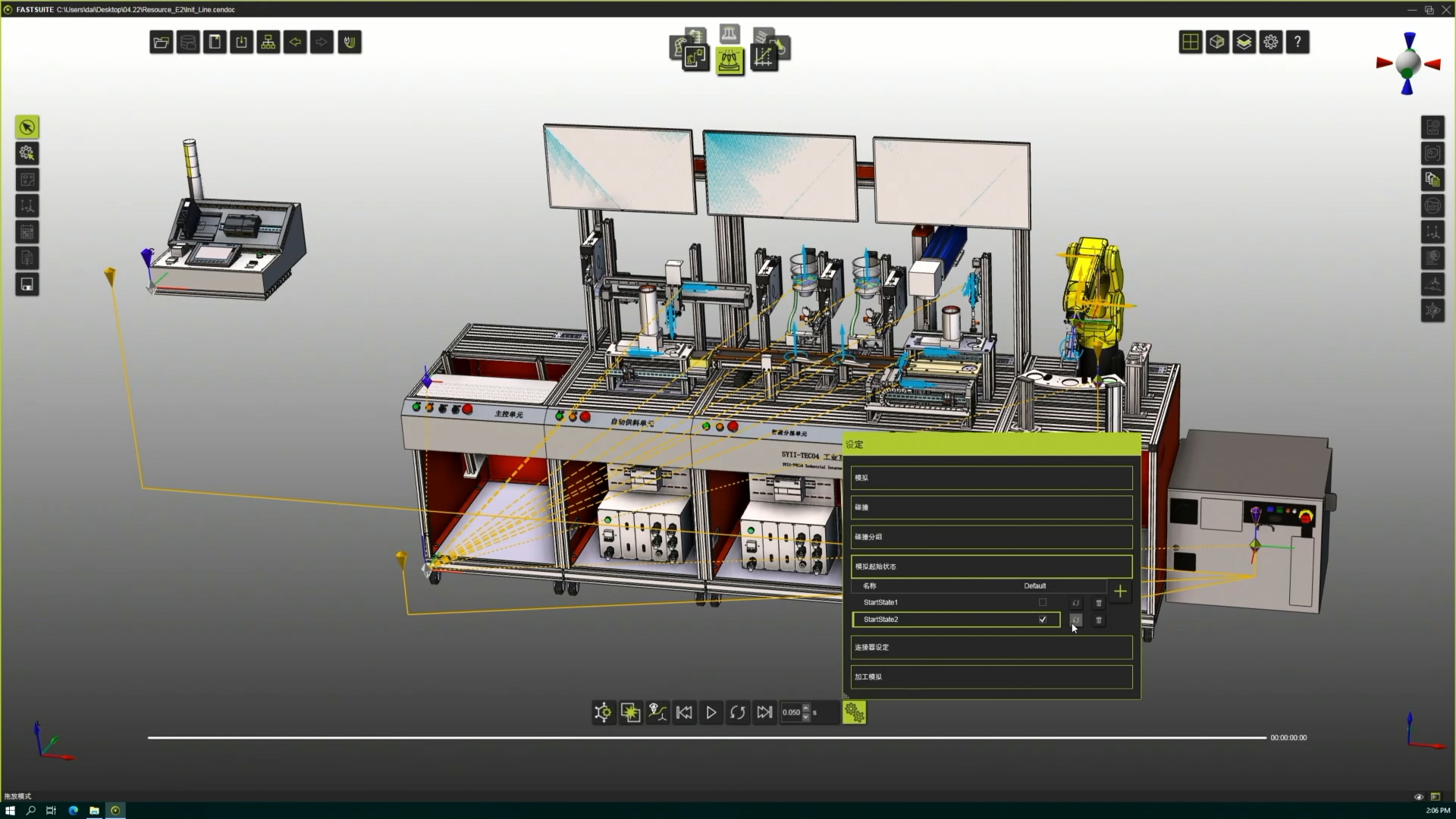
__重要__:在电气连接、机械连接有变化时,在软件中做仿真前需要进行一次状态更新。状态栏存在于离线编程工作台中,下方工具栏中选择状态选项。状态的理解应当为一个位置确定的资源摆放,在明确所有位置关系后才可以进行离线编程。相应的,在场景有所更改后,必须创建新的状态或者刷新当前的状态,才可以在离线仿真中起作用。下面进行状态的展示:
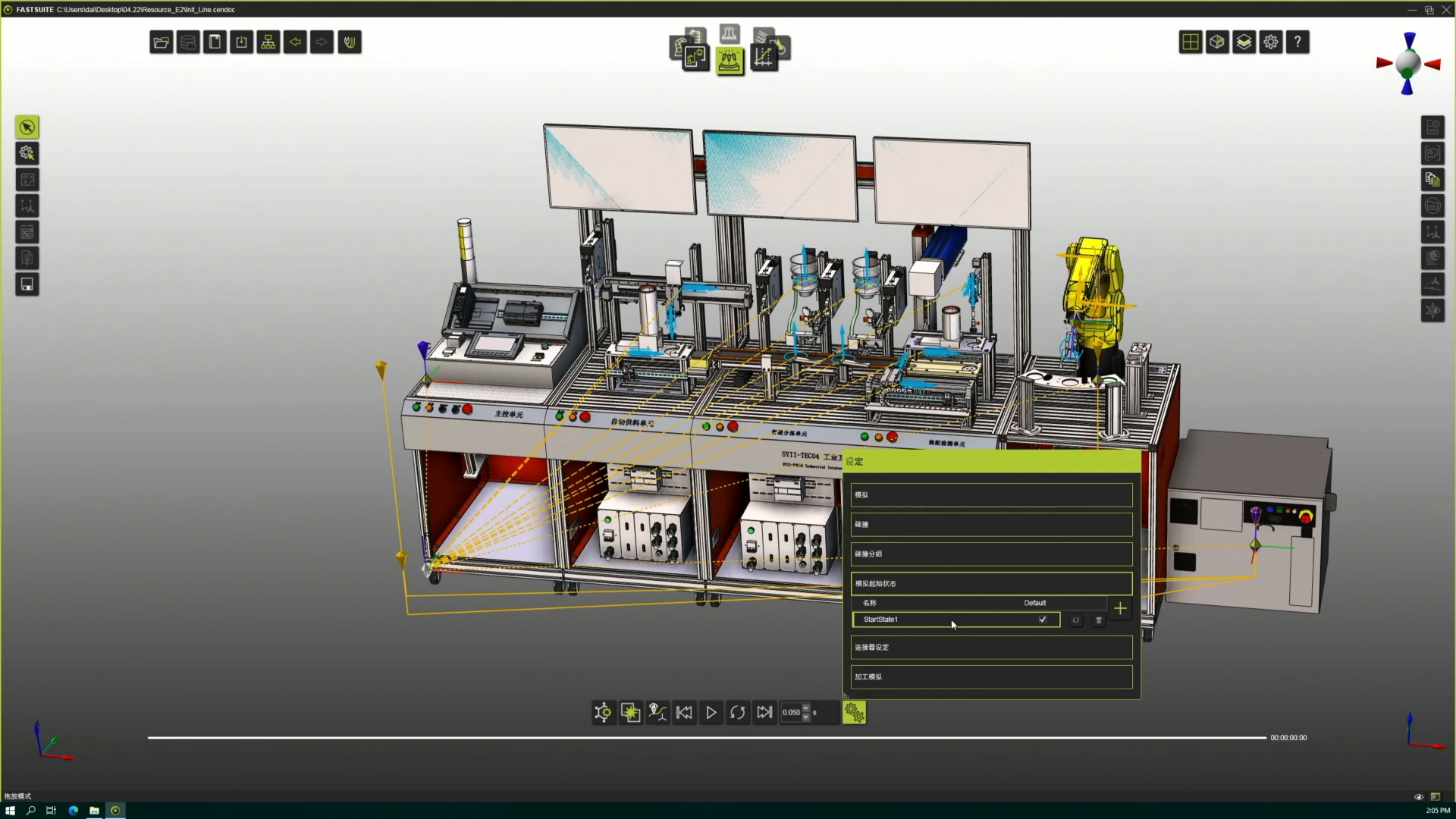
首先,将PLC与产线连接断开,包括机械连接和电气连接:
在未进行任何保存时,打开离线编程的状态栏,点击StartState1,可以看到PLC回到了原本的位置,机械连接和电气连接也同时被修改回来。
为保存更改PLC位置之后的信息,需要点击状态中的加号按钮,添加一个新的状态。此时StartState2会保存PLC断开连接后的所有信息:
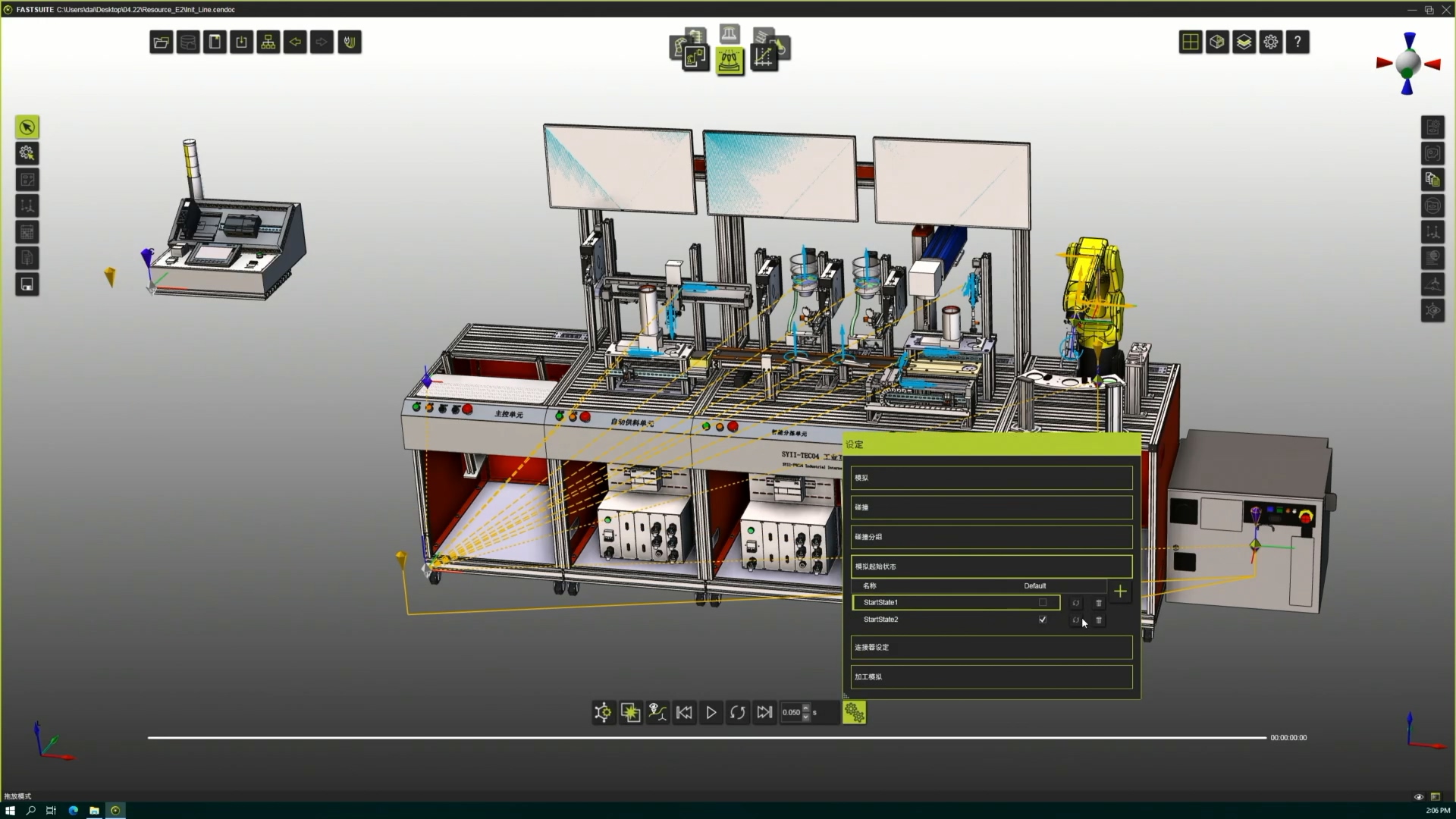
而刷新状态的作用为改变当前状态,如图所示,我们将PLC的机械连接改变,重新连接其电气连接。在更改后点击StartState2右方的刷新按钮,此时PLC的状态被改变,点击StartState2将会回到PLC机械位置改变、电气连接完成的状态。
最后,我们需要保存经过更改的组装线文件。
打开上方工具栏的文件管理器选项:
在显示的窗口中,选择组装线资源,并在其上方点击右键,选择保存:
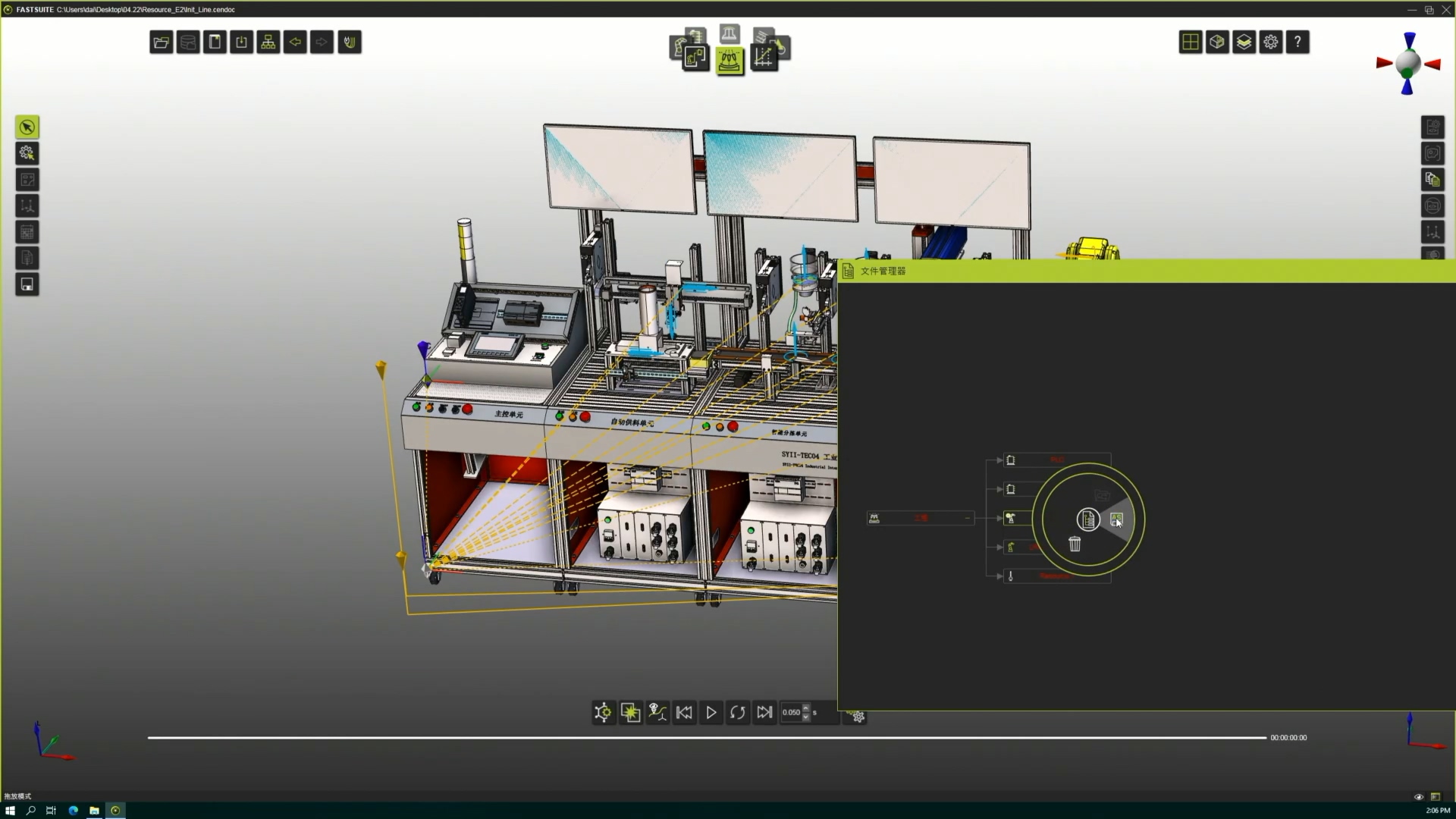
选择保存后,文件管理中会显示其为白色,证明保存完成。
接下来,再次打开文件管理的上级菜单,选择其中的另存为:
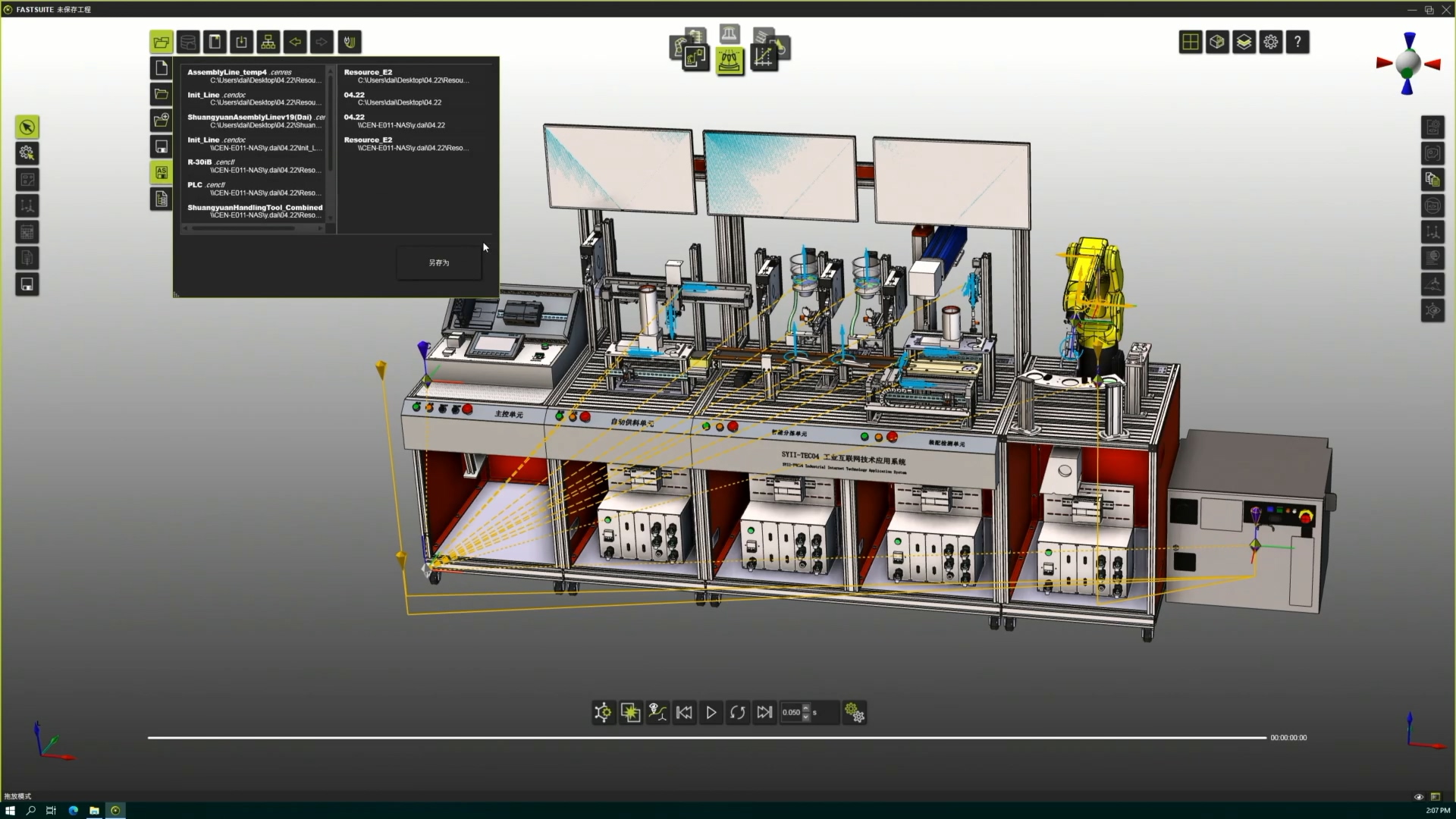
选择路径,保存场景的cendoc文件。