# 二、编程焊接操作
本章将讲授编程焊接操作的基本步骤, 基本步骤是生成不同焊接轮廓上的焊接路径。
## 1. 示教初始位置
为了本课程的目的,每次修改焊接路径位置都需要确认并仿真验证。
* 验证离线编程的设置。检查是否已将工具路径修改选项设置为手动。
* 使用机器人上的开始教学命令编程第一个位置。
* 切换到事件并示教修改插入的位置。一种方法是简单地选择一个机器人轴并拖动它。或者使用操纵器来更改位置。使用应用更改命令确认修改的位置。
## 2. 创建焊接焊缝;即焊接轮廓
* 执行生成过程轮廓几何命令,并验证是否显示过程轮廓几何定义仪表板。如果没有,则可以通过右键单击空白3D空间并选择打开定义面板命令来显示它。
* 选择定义方法通过投影定义焊缝轮廓。选择第一个工件板,然后拖动到第二个板并在那里释放。此方法通过将第一个板边缘投影到第二个板上来搜索轮廓。
* 按键盘上的*左右箭*头键更改工具角度。按*上下箭*头键更改行进角度。
## 3. 创建焊接路径
* 选择**自动生成工具路径**并接受轮廓。将计算焊接操作及其所有焊接路径位置。
* 按仿真工具栏中的播放按钮运行创建的程序的仿真。
* 在仿真栏中单击重置初始状态。创建第一个操作时会自动生成初始状态。
## 4. 沿焊缝路径规划
* 切换到事件并示教。此环境允许规划、修改和优化单个焊接路径位置。选择任何路径元素以使机器人跳转到它。当两个路径元素太接近时,会出现一个选择器以选择所需的一个。
* 一旦选择了目标,使用键盘上的后退和前进键沿焊接路径向左或向右规划。
* 打开教学面板。单击中间箭头沿焊接路径前后规划。单击外部箭头以跳至操作组的开头或结尾。
## 5. 焊接编程操作
* 生成工艺几何轮廓。通过投影创建新的角焊缝。在焊缝轮廓上最接近滑动选择的端点决定了焊缝轮廓的默认开始和方向。预览显示后,点击轮廓开始处的紫色箭头以改变其方向。接受轮廓并计算焊接路径。
* **合并多个焊接轮廓**: 在第一条边上创建另一个新的角焊缝。当无法找到投影时,首先选择边缘,然后继续选择表面。然后在相邻边缘上进行第二次投影。两个找到的结果将合并为一个角焊缝。当投影分开时,将在中间创建线性连接。完成焊接轮廓并确认以计算焊接路径。
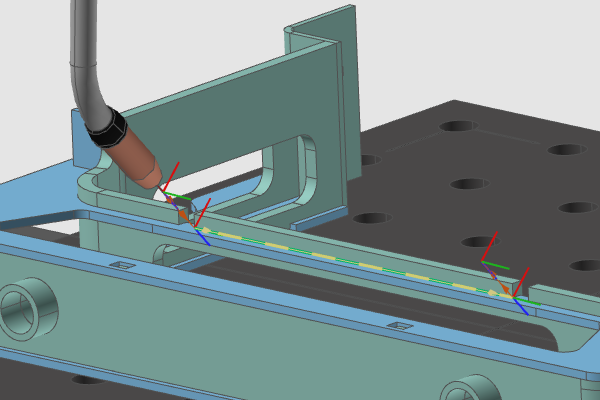
* 焊接操作也可以在现有工艺几何上编程,或当焊接路径没有立即计算时。创建新的焊缝。显示预览后,切换到编程工具路径。然后移动绿色锥体以改变路径的开始,移动红色锥体以改变路径的结束。接受并创建焊接路径。黄色锥体表示应该从哪一侧接近轮廓。
* 重置起始状态并模拟整个程序。程序模拟。
## 6. 编程具有触碰传感校准的焊接操作
* **焊缝校准**:打开编程默认设置仪表板。在技术基础技术选项卡中展开配方容器。要启用焊缝校准,设置方法为“通过点指示触碰”。
* 如果尚未激活,请切换到生成工艺几何。创建新的角焊缝。轮廓选择完成后,点击将用于定义焊接部分上的焊缝校准位置的表面。基于所见即所得,鼠标点击表面按顺序成为触摸位置。计算焊接路径并运行模拟以查看结果。