操作器 Manipulator
===
## 操作器介绍
操作器是软件中所有与方位相关操作的基础。物体的旋转、平移等全部依仗操作器的坐标显示。
为了更好的理解操作器的作用,可以将其想象为一个临时的右手坐标系,在移动物体、定义其方向、旋转等信息的时候,以此坐标系为基准,进行XYZ方向的不同操作。由于软件的世界坐标系为相对固定的,操作器是为了能够相对更直觉的创建物体移动方向而存在,一定要先定义运动方向,才会有运动距离和角度。除了几何体之外,关节的定义也需要频繁的使用到操作器,具体的使用方式请参见软件教程。
#### 调用操纵器
#### 在元素上放置操纵器
操纵器在多种操作中用作参考。以下是一些示例。
#### 移动几何体
#### 示教机器人
## 使用方式
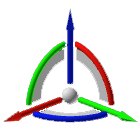
操作器由四个部分组成,分别是其中心点,三个坐标轴(红绿蓝分别对应XYZ轴),转动弧与示意面。
### 中心点 & 移动菜单
操作器的中心点为坐标系确定空间位置的基准点,在激活了饼状菜单中的操作器后可以通过鼠标左键点选的方式将操作器放置到需要的位置,也可以通过右键中心点,选中点取命令,再将它放置到特定位置。
左键长按中心点时进行拖动,可以将坐标系在3D view中移动;而左键点选中心点,会打开当前操作器的位置移动菜单,其中会显示坐标系的当前位置,也可以通过填入数据来移动操作器。
#### 移动菜单
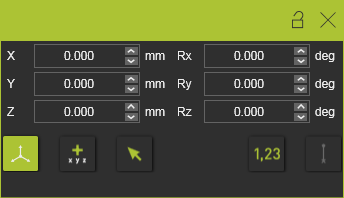
移动菜单中共有三个相对位置选项:(为了更好理解,请参[标定](../Helper/pfunc_lb_calibration.md))
第一个为世界坐标系下的位置,下图中显示的即为世界坐标原点。
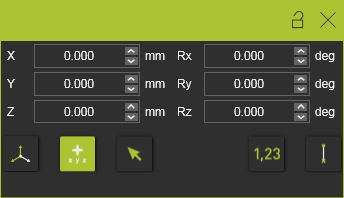
第二个为当前坐标系的相对位置,打开移动菜单后点选此选项,所有的示数将归零,而此时再次移动操作器,会在移动菜单中更新以此坐标系为基准的操作器位置。
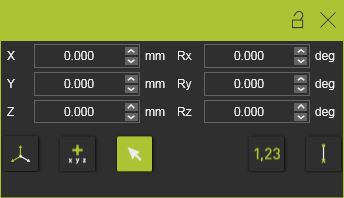
第三个为点选坐标系显示相对位置。在[显示过滤器](filters.md)中打开坐标系的显示,可以在3D View中看到所有资源的坐标系,点选鼠标图标之后点击3D View中的坐标系,则会将移动菜单的相对位置计算设置为选中的坐标系。
右侧两个按钮分别为步进与显示/隐藏物体的连接线。
### 坐标轴
鼠标左键按住坐标轴,可以对其进行拖动,此时操作器会沿直线移动;双击某个坐标轴,会让选中的坐标轴转动180度。右键点选坐标轴会跳出相应的饼状菜单,其中只有一个对齐命令,选择二级菜单中的相应功能来对齐坐标轴。
### 转动弧
鼠标左键按住转动弧会将操作器绕相应的坐标轴旋转,如点选蓝色转动弧则会绕Z轴旋转坐标系;双击某个转动弧会让操作器沿当前选择的位置旋转90度,顺/逆时针旋转取决于鼠标此时位于旋转弧的位置,如果位于旋转弧逆时针旋转的45度之中,则会让操作器逆时针旋转90度,顺时针同理。
### 示意面
示意面共有三个,分别代表了XY XZ YZ三个平面,左键按住相应的示意面可以将操作器在相应的平面中平移,而不会改变另一个维度的数值。