目的
|
|
外部设备的运动学功能可用于优化编程并减少机器人轴的运动。
|
|
|
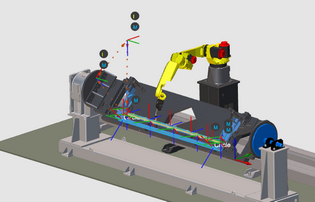
由前面几个步骤的组件创建的准备好的工作单元将被加载到项目中。焊接动作已被编程。该程序将通过插补外部设备的运动轴进行优化。
|
|
|
步骤
|
|

|
确保不时保存。
|
|
|
1
|
加载工作单元
|
1.1
|

|
从手动安装驱动器中打开 workcell .cendoc 文件。本文档包括完成本章中的任务所需的完整项目设置。
|
|
|
2
|
使机器人导轨参与程序
|
2.1
|

|
编程焊接路径。
|
|
2.2
|

|
修改导轨位置,以便机器人可以到达工具路径的逼近位置。
|
|
2.3
|

|
通过使用示教仪表板,可以移动导轨,以便机器人可以到达焊接路径的末端位置。
|
|
2.4
|

|
模拟路径包括导轨运动。
|
|
2.5
|

|
沿焊接路径更改工具路径位置点的数量。近似属性确定此位置点数量。
|
|
2.6
|

|
沿路径添加导轨位置的插值以生成导轨的平滑运动。
|
|
|
3
|
使变位机参与程序
|
3.1
|
|
编程圆弧焊接路径。
|
|
3.2
|
|
通过使用示教仪表板,修改变位机的角度,以使机器人到达焊接路径的逼近位置和结束位置。之后,模拟结果。 .
|
|
3.3
|
|
沿焊接路径更改工具路径位置点的数量。近似属性确定此位置点数量。然后沿路径添加工件定位器的插值,以使其平滑旋转。
|
|
|
|
|
4.1
|
|
模拟程序。
|
|
|
|
|
5.1
|

|
将项目另存为cendoc文档。
|
|
|
|




