目的
|
|
使用资源创建工作台轻松构建机器人导轨。
|
|
|
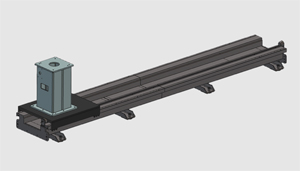
机器人导轨的几何形状将从一个外部文件中导入以构建导轨资源。为了能够在工作单元中使用导轨,它将在适当的信息下完成。
|
|
|
|
步骤
|
|
1
|
准备
|
1.1
|

|
切换到资源创建工作台。

|
|
1.2
|

|
创建一个新的空文档。
如果正在运行的会话中已经打开了另一个文档,则必须执行此步骤。如果不是,则可以跳过此步骤。
|
|
1
|
单击上部文档工具栏中的“文件”命令。将打开一个下拉菜单。
|
 
|
|
2
|
单击新建命令。
|
|
|
3
|
如果文档已经打开,则会出现一条消息,决定保存该文档,不保存而将其关闭或取消执行“新建”命令。
|
|
|
|
|
|
|
|
|
2.1
|

|
从文件 Rail.stp 导入几何图形,该文件位于本手册的安装驱动器上。
|
|
2.2
|

|
为此导入的导轨创建一个新的导轨类型资源。
|
|
2.3
|
|
创建导轨的运动学骨架。导轨将具有(同步)线性运动。
|
|
|
3
|
创建导轨资源形状
|
3.1
|

|
将导入的几何图形的导轨部分关联到导轨资源的基坐标(固定部分)。
|
|
3.2
|
|
将轨道几何体的可移动基座部分关联到导轨资源的线性轴上。
|
|
|
4
|
创建基座接口
|
稍后将使用基座接口将机器人连接到导轨。它可以确保机器人在仿真过程中与基座一起移动。
|
4.1
|

|
在基座上定义一个父接口。
|
|
|
5
|
定义导轨属性
|
5.1
|

|
给导轨资源起一个适当的名字。并定义接口的属性。
|
|
5.2
|
|
定义导轨行程。
|
|
5.3
|
|
定义导轨原点位置。
|
|
|
|
|
6.1
|

|
保存机器人导轨。
|
|
|
|

|
确保不时保存数据。
|
|
|